飞机电动滑行系统驱动特性及节能减排性能分析
2020-09-10 03:57:56唐建军郭卫东徐东光贾玉红
北京航空航天大学学报 2020年8期
唐建军,郭卫东,徐东光,贾玉红
(1.北京航空航天大学 大型飞机高级人才培训班,北京100083; 2.北京航空航天大学 机械工程及自动化学院,北京100083;3.中国商飞上海飞机设计研究院,上海201210; 4.北京航空航天大学 航空科学与工程学院,北京100083)
近年来,中国民用航空行业蓬勃发展,其背后带来的负面影响也在逐渐加剧。其一,大量的燃油消耗导致能源的浪费,也关系到机场和航空公司的经济效益;其二,主要包括CO、HC、NOX在内的污染物超量排放导致空气质量的日益下降,对环境造成的破坏不容忽视,不利于绿色航空的发展。因此,如何进一步节省燃油消耗和减少污染物排放,是多家机场和航空公司的重点关注对象。
飞机在地面滑行时,利用自身电力系统代替主发动机(以下简称主发)作为动力源,驱动飞机地面滑行,这种新型驱动系统称为飞机电动滑行系统(Aircraft Electric Taxiing System,AETS)。其最早可以追溯到2005年,由Borealis公司家族成员WheelTug公司提出在波音767上开发测试AETS原型机的想法,此后一些国外巨头纷纷开展了相关样机实验[1]。
在理论研究方面,2011年,Dzikus等[2]研究了电动滑行对燃料量的节省高度依赖于飞机地面滑行时间,而飞行距离对整体燃油经济性的影响较小;同年,Hamiti等[3]研究了利用AETS驱动主起落架机轮(以下简称主轮)运转的可行性,对执行机构可能放置的位置进行了研究,发现AETS适用于高频次起落的短途客机;2013年,Dzikus等[4]对于中短途飞机分别采用电动滑行、操作拖曳、单引擎驱动建立了油耗模型;2016年,万丽丽等[5]在电动滑行过程中采用地面网络拓扑建模的方法,通过优化滑行道路布局减少了油耗和排放;2015年,侯乐毅和朱刚[6]针对A380飞机建立了AETS动力学模型,该飞机所需的电动滑行功率需求远大于辅助动力装置(Auxiliary Power Unit,APU)提供的发电功率;2018年,张威等[7]对电动滑行传动方案及机轮设计做了研究,运用MATLAB/Simulink对滑行过程加以仿真分析,电动滑行驱动最大滑行速度达到了37 km/h。
由于AETS是一个新的概念,国内外对其理论研究还较少。目前,理论研究主要集中在电动滑行设计、驱动力计算、能耗污染及发展前景挑战等方面,研究相对零散,缺乏系统性。随着以C919为代表的国产大飞机的快速发展,民用航空行业朝向绿色航空发展,研究中国自主的AETS至关重要。本文在前人的基础上基于A320-200型客机设计AETS,从仿真的角度对其在地面滑行阶段的驱动能力、稳定性和节能减排性能进行研究,以此综合分析AETS的可行性和经济特性。
1 飞机电动滑行系统方案设计
在民用航空飞机地面滑行过程中,推动飞机滑行的是怠速运转的主发,其低速运行期间燃油利用率低,污染物排放率高。通过先进的发动机技术和气动设计技术来减少燃油消耗和污染物排放问题已经达到了一个技术瓶颈,因此,必须采用新的思路和技术途径。如果采用AETS代替主发驱动飞机地面滑行,进而可能在能源消耗、有害气体排放等方面产生价值效益。AETS的一般组成结构如图1所示。
为了设计AETS传动方案,需要对飞机地面滑行时的受力状况加以分析。飞机在地面滑行时受力情况如图2所示。图中:α为滑行道坡角;Nn、Nm分别为前起承力、主起承力;v为滑行速度;h为重心距离地面高度;a为前起落架距重心纵向距离;b为主起落架距重心纵向距离;mg为飞机重力。
由图2所示,飞机电滑行的动力学方程为

式中:Ftr为驱动力;Frr为滚动阻力;FD为空气阻力;Fi为坡道阻力;Fj为加速度阻力[8]。
AETS驱动机轮的驱动力不能大于机轮与地面间的附着力,否则会打滑导致驱动能力骤降或者无法驱动。轮胎在硬路面上不打滑滚动时,地面给予轮胎前向驱动力的极限值即为轮胎与地面间的附着力Fφ,其与轮胎承受地面支持力FZ成比例,即

图1 AETS组成结构Fig.1 Composition and structure of AETS

图2 飞机滑行受力状况Fig.2 Stress state of aircraft taxiing

式中:φ为附着力系数(最大静摩擦力系数)[9]。
将A320-200 型飞机和滑行道等相关参数[6,10-11](详细数据见表1)代入式(1)和式(2),计算出此型号飞机所需最小驱动力为15 847 N,其前起落架机轮(以下简称前轮)最大附着力为8 678 N,其主轮最大附着力为80 554 N。所以,对目标飞机只有采用主轮驱动才满足滑行要求。进一步设计了利用APU供电、无刷直流电机(Brush-Less Direct Current Motor,BLDCM)驱动、干式多片型快速电磁离合器与二级齿轮副传动的AETS,其二维传动结构和三维实体效果如图3所示。

表1 A320-200型飞机和滑行道等相关参数[6,10-11]Table 1 Relevant parameters of A320-200 aircraft and taxiway[6,10-11]
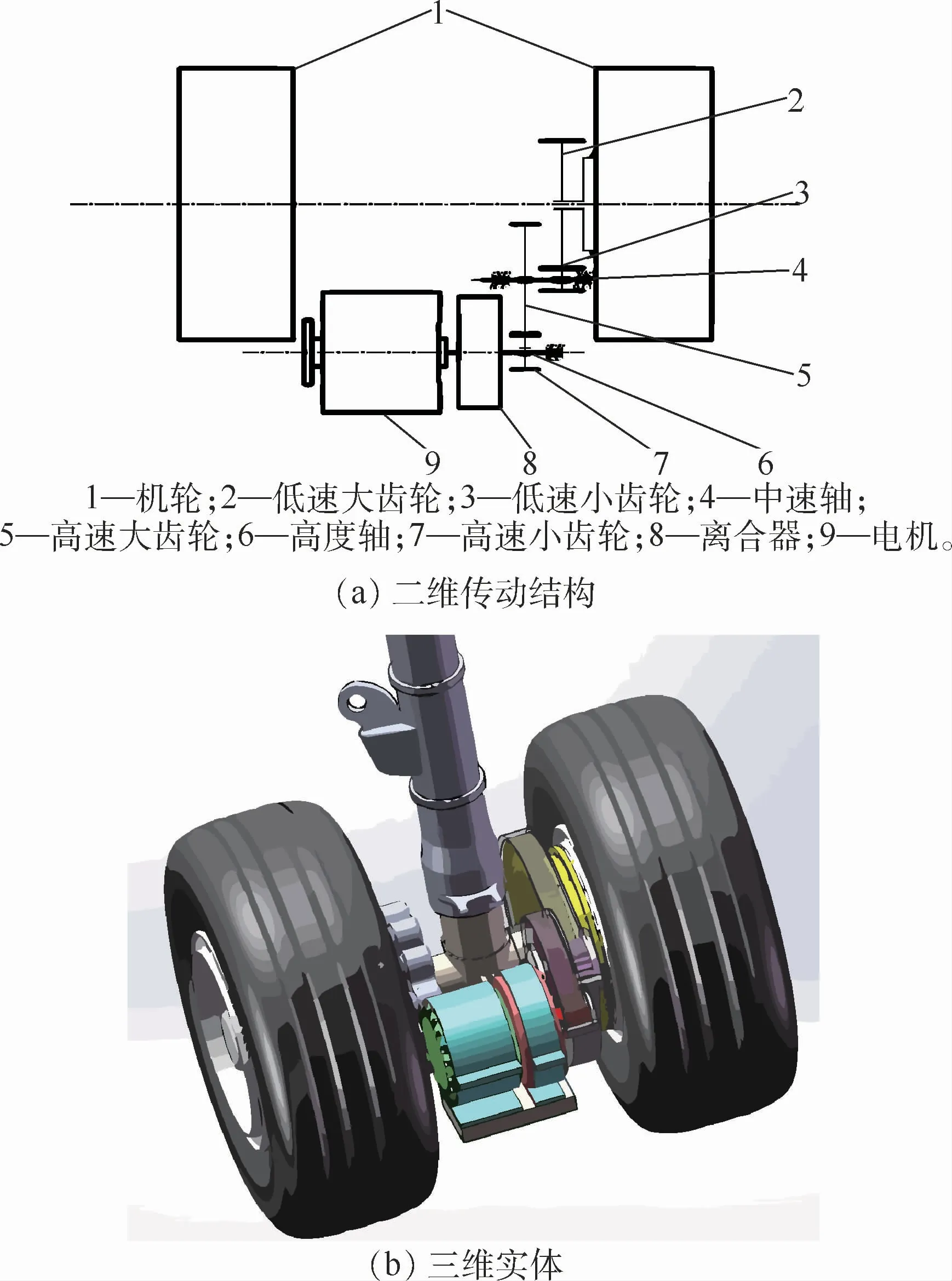
图3 AETS机械系统Fig.3 Mechanical systems of AETS
2 飞机电动滑行系统建模
基于MATLAB/Simulink搭建AETS仿真模型,此系统可分为驱动电机模块、机械系统模块和排放性能评估模块等。基于理论推导先建立各个模块数字化模型,进一步利用Simulink元器件库中各元件对AETS进行模块化搭建。在此基础上仿真驱动能力、稳定性及节能减排性能。
2.1 驱动电机模型
系统使用驱动电机为一款BLDCM。作为直流电机的一种,BLDCM的基本组成及原理与一般的直流电机无异。BLDCM 包括电机本体(转子磁铁、定子线圈、支撑件等)、霍尔位置传感器及电子控制线路开关三大部分。依据其结构组成、运转原理、数学模型[12-13],在Simulink中搭建的BLDCM模型如图4所示。
采用PID控制器调节电机转速。比例因子KP、微分因子KD主要影响系统的快速性和稳定性。合理的KP、KD值可以使系统超调量小,调节时间短,稳定性高,动态性能好。积分因子KI主要影响系统的稳态误差。合理的KI值可以消除系统静差,提高系统抗干扰能力。将实际输出转速与控制转速的差值输入到PID控制器中,通过控制逆变器的供电电压实现对电机转速的调节。合理的KP、KD、KI才能使电机输出转速相对于控制转速有更好的快速性、稳定性和准确性。运用经验整定方法[14]调节,KP=50,KI=1 000,KD=0.2。
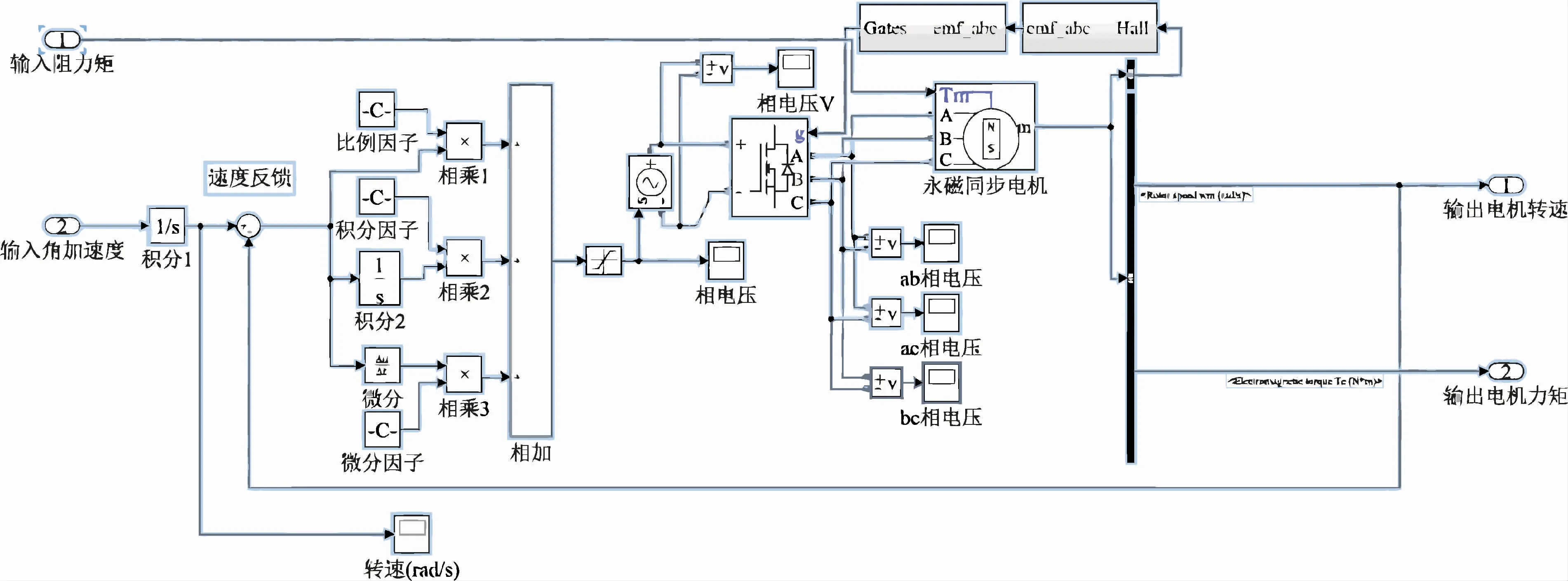
图4 BLDCM Simulink模型Fig.4 Simulink model of BLDCM
2.2 机械系统模型
AETS机械系统包括传动系统和飞机本体。由式(1)进一步推导[8]:
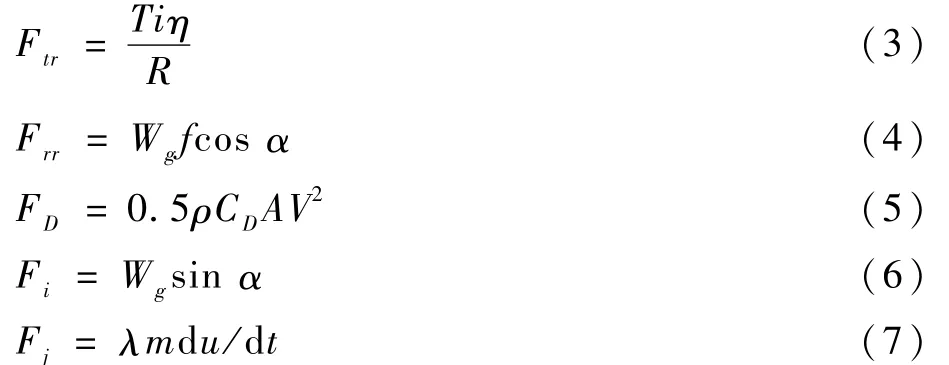
由式(1)~式(7),传动系统输入输出的动力学方程为

式中:T为电机驱动力矩;i为传动系统传动比;η为传动系统传递效率;R为主轮半径;Wg为飞机自重;f为滚动阻力系数;α为跑道斜角;ρ为飞机迎风空气密度;CD为空气阻尼系数;A为飞机迎风面积;V为飞机迎风速度;λ为旋转质量转换系数;m为飞机质量;d u/d t为飞机滑行加速度。
传动系统模块由离合器与传动齿轮副等组成。利用Simscape里面的齿轮、力矩传感器、角速度源等组件搭建好的传动系统如图5所示,相关数据见表2。
Simulink里为用户提供了飞机机身与机轮等部件。根据实际数据设置参数,如飞机参数(质量、重心位置、机身横截面积、轮胎直径、轮胎滚阻系数等)、环境参数(滑行跑道坡度、滑行风速等)(详细数据见表1、表3)来计算仿真时的动力学数据。搭建飞机本体系统模型如图6所示。
2.3 排放性能评估模型
AETS的油耗排放性能评估包括衡量滑行中的油耗量及有害气体排放量。AETS消耗的电能来源于APU的发电机。带动发电机运转发电的APU本质为小型的发动机,其消耗的也是飞机燃油,燃油的消耗导致AETS工作过程中会排放有害气体。所以,对电动滑行性能评估本质上是建立APU的燃油消耗模型与有害气体排放模型。A320-200型客机APU型号为GTCP36-300,其发电机最大功率可达90 kW,该APU性能参数如表4所示[15]。表中:PAPU为APU发电机输出功率,kW。
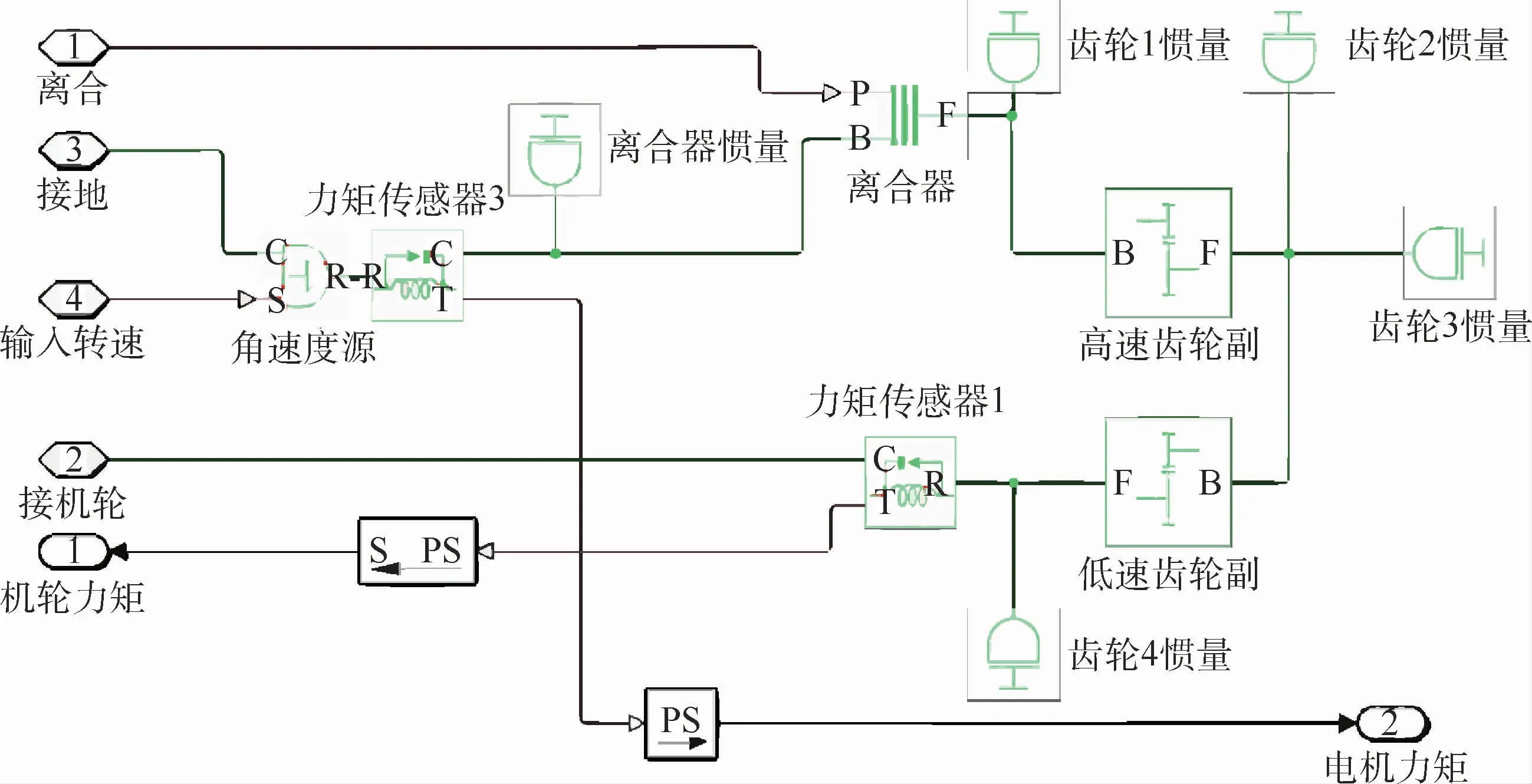
图5 传动系统Simulink模型Fig.5 Simulink model of transmission system

表2 AETS相关数据Table 2 Related parameters of AETS
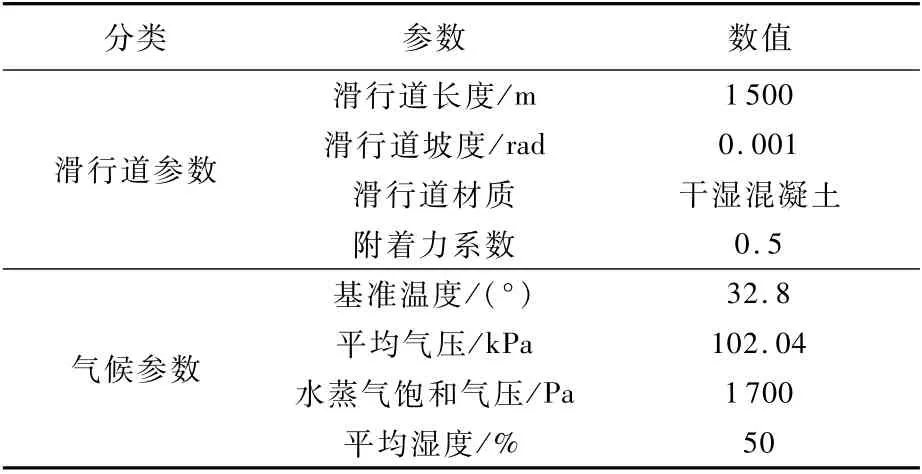
表3 北京首都国际机场相关参数Table 3 Related parameters of Beijing Capital International Airport

图6 飞机本体Simulink模型Fig.6 Simulink model of aircraft body
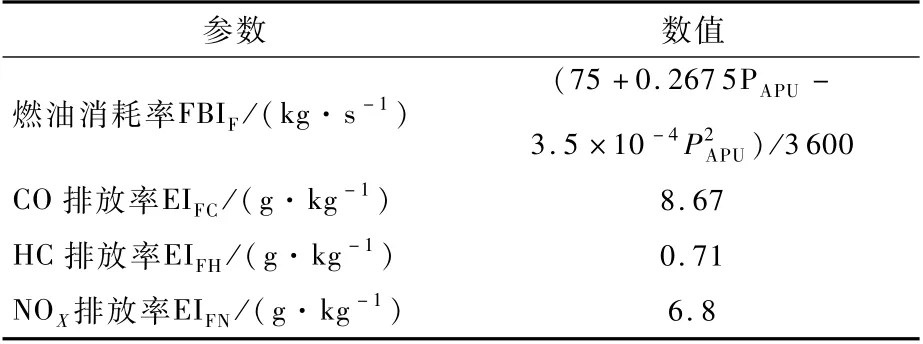
表4 GTCP36-300型APU性能参数[15]Table 4 Performance parameters of GTCP36-300 APU[15]
评估AETS能耗、有害气体排放性能时,可利用主发驱动飞机滑行作为对比对象。建立主发能耗、排放数学模型。在相同滑行条件下,计算并对比主发、APU燃油消耗量和有害气体排放量,进而可以分析出AETS节能减排的能力。
A320-200型飞机采用CFM56-5B/4P型发动机,其性能参数如表5所示[16]。
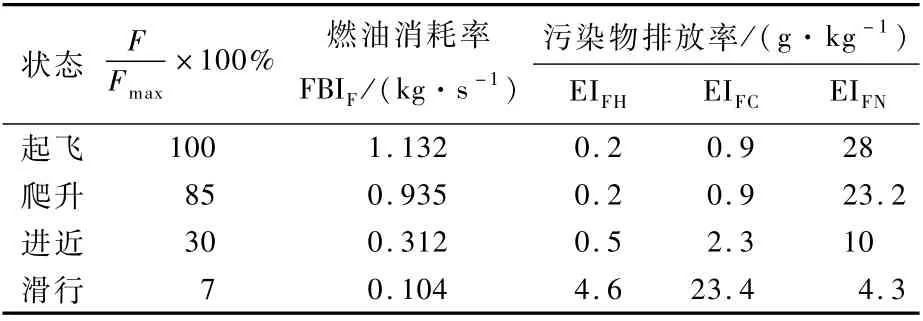
表5 CFM 56-5B/4P型发动机性能参数[16]Table 5 Performance parameters of CFM 56-5B/4P Engine[16]
基于表5数据,可利用最小方差原则建立FBIF关于推力F的插值拟合关系,EIFH、EIFC、EIFN关于FBIF的插值拟合关系,进而插值出相应滑行推力下发动机燃油消耗率、气体排放率的近似数值。拟合出的数学函数如式(9)~式(12)所示,函数图像如图7所示。

上述APU、主发的燃油消耗率、HC排放率、CO排放率及NOX排放率均是基于25°标准大气压下测得的标准值。实际条件下,机场所处位置不同,机场滑行道温度、气压、相对湿度等也会有所差异,会对燃油量消耗和相关气体排放的系数造成影响。假设机场气压为P、机场压强与标准状况下海平面压强之比为δ、机场温度与标准状况下海平面温度之比为θ、机场空气相对湿度为ψ、对应条件下机场水蒸气饱和气压为Pv、飞机滑行马赫数为Ma[17]。为了仿真能耗、排放数据的准确性,需要对能耗、排放系数进行修正。考虑环境因素后的修正结果为

在此数学模型的基础上,利用Simulink搭建的APU、主发性能模型如图8和图9所示。
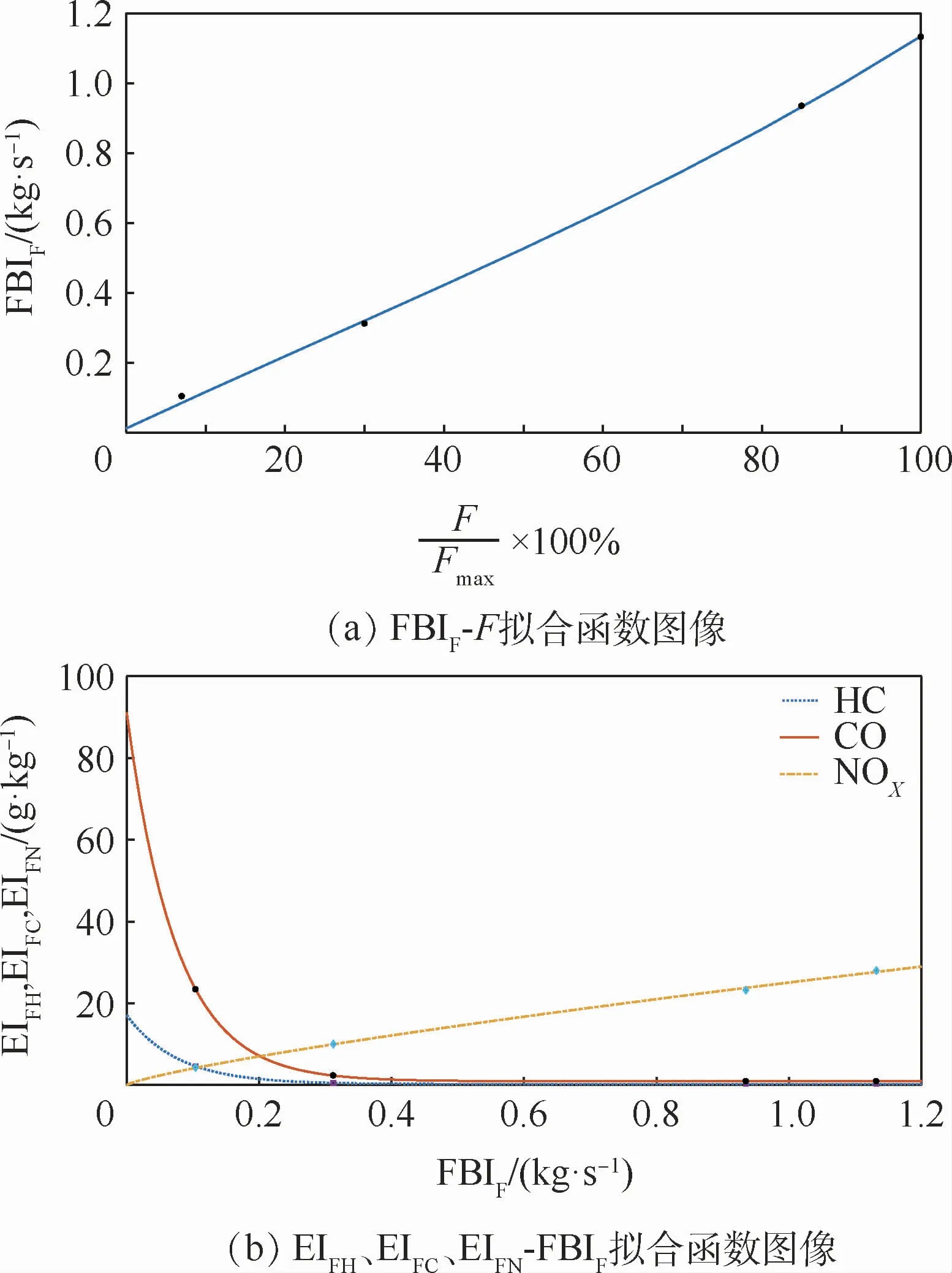
图7 CFM56-5B/4P型发动机性能参数拟合函数图像Fig.7 Fitting function images of CFM56-5B/4P engine performance parameters

图8 目标型号APU性能Simulink模型Fig.8 Simulink model of target APU performance

图9 目标型号主发性能Simulink模型Fig.9 Simulink model of target main engine performance
3 飞机电动滑行系统仿真分析
将BLDCM、机械系统、APU性能、主发性能模块与自函数编写的模拟输入模块按照系统仿真逻辑结构(见图10)组合搭建AEST总体Simulink仿真系统模型,如图11所示。
3.1 驱动能力
机场滑行道的路况大同小异。本文仿真在北京首都国际机场某滑行道上进行,A320-200型客机满载时按照滑行技术指标[6]滑行,忽略空气阻力,飞机平稳启动至平稳滑行的理想情况。利用本文AETS仿真模型,模拟驾驶员操作,输入不同起步加速度a0、指定滑行速度v,仿真飞机电机驱动力矩和滑行速度的输出结果,如图12所示。
由图12(a)可知:①飞机起步加速度不同时,电机驱动力矩也会相应变化,但最终都稳定在所选电机额定力矩500 N·m范围内。飞机从静止启动瞬间,电机启动力矩会有超调,最大超调量可达到520 N·m,略大于所选电机额定力矩。由于超调力矩持续时间极短,且电机在使用过程中也允许短时间超负荷运行,此结果可接受。②当飞机平稳匀速运行时,所需电机驱动力矩约为209 N·m,略小于由式(8)计算的飞机稳定运行时所需理论电机力矩220 N·m。以最大起步加速度启动时,电机启动稳定力矩478 N·m也略小于电机额定力矩。这是由于仿真时忽略了传动轴承的机械损失造成的。
由图12(b)可知:此系统驱动飞机地面滑行最大速度可达4.91 m/s(17.7 km/h),而Wheel-Tug开发的AETS驱动飞机滑行速度最大可达18.5 km/h[7]。可知,在驱动滑行速度上本文系统达到了与WheelTug开发系统同等水平程度。
综合说明,本文系统驱动能力良好。
3.2 稳定性
当系统平稳运行时,在滑行时间80 s时给飞机施加某一波动负载,图13为电机驱动力矩、飞机滑行速度波动情况。

图10 AETS仿真逻辑结构Fig.10 Simulated logic structure of AETS

图11 AETS Simulink封装模型Fig.11 Simulink encapsulation model of AETS
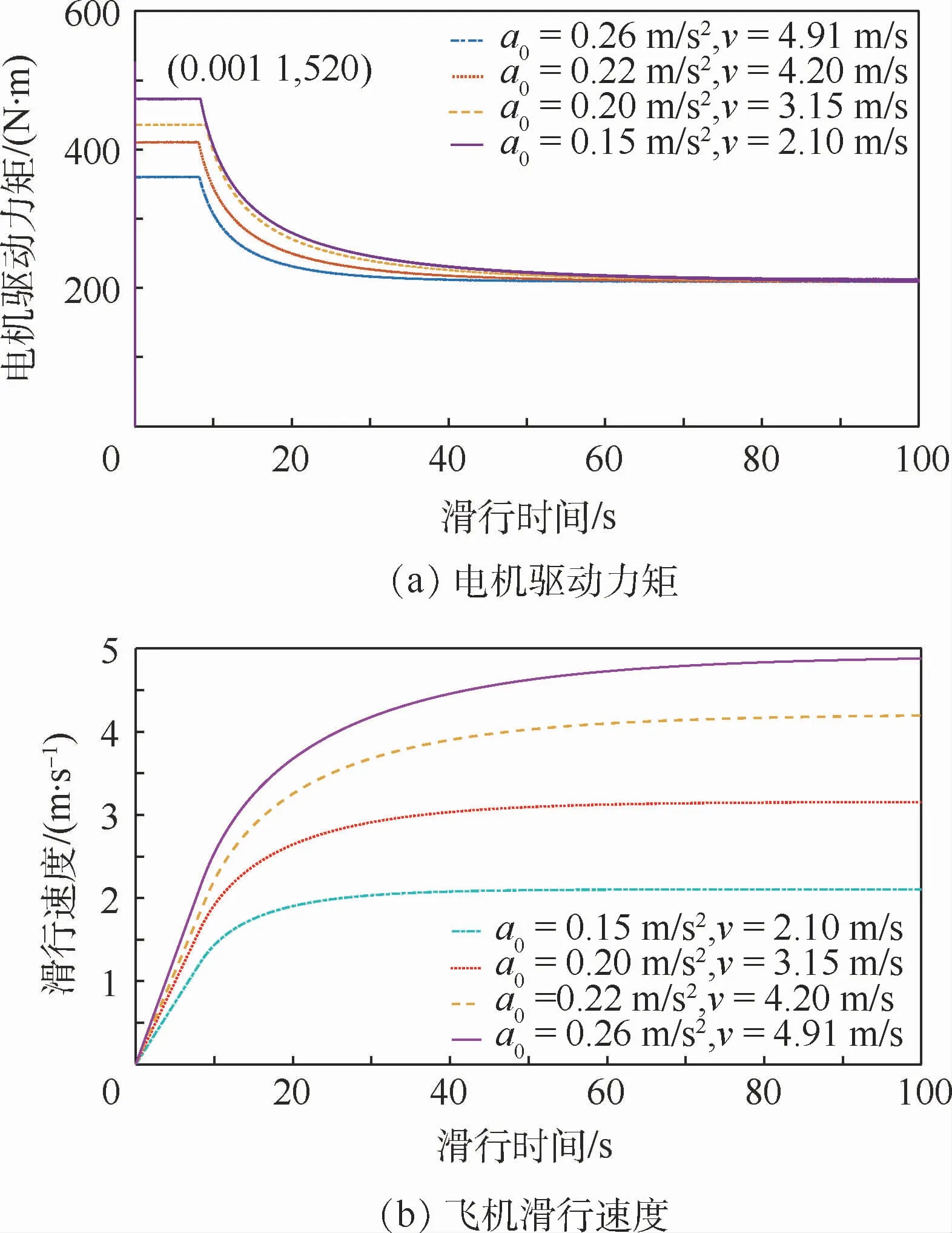
图12 驱动能力仿真Fig.12 Simulation of driving capability
由图13仿真结果表明,80 s时由于突加外部负载,电机驱动力矩会激增,在82 s时恢复至原状态。飞机滑行速度几乎无波动。本文系统稳定性良好。
3.3 节能减排性能
依据北京首都国际机场滑行道平均长度、滑行技术指标要求,设置滑行距离1 500 m,滑行时间不超过10 min。在相同条件下,对比仿真计算2种驱动方式的燃油消耗量、CO、HC及NOX排放总量,并计算利用AETS代替主发驱动飞机滑行节省的燃油消耗率和有害气体减排率,以此研究本文系统节能减排的能力。图14显示出2种不同驱动滑行方式过程中的燃油消耗量和相关气体排放量对比结果。

图14 两种驱动方式燃油消耗、气体排放对比Fig.14 Comparison of fuel consumption and gas emission between two driving modes
为了突出对比利用AETS代替主发所带来的效益,计算其燃油消耗节省率ηF、有害气体减排率(CO、HC、NOX减排率分别为ηC、ηH、ηN),如图15所示。
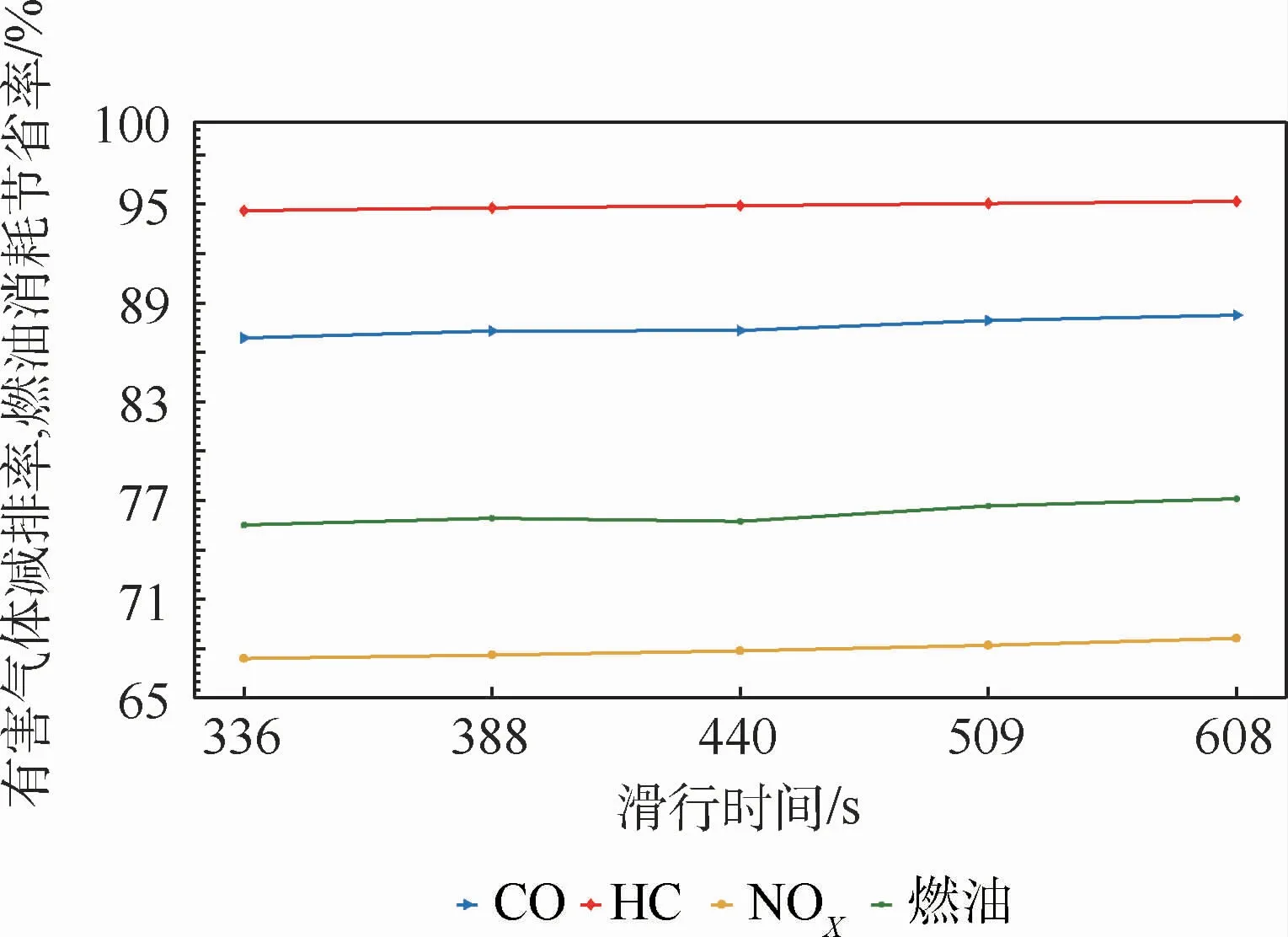
图15 AETS相对于主发燃油消耗节省率、有害气体减排率Fig.15 Fuel saving rate and harmful gas emission reduction rate of AETS relative to main engine
由图15所示,利用AETS代替主发驱动目标飞机在地面滑行阶段,能有效节约燃油消耗和相关污染气体的排放。其中,ηF可达75%以上,ηC可达86%以上,ηH可达94%以上,ηN可达67%以上。在空中航行阶段,所设计的AETS加装在目标飞机上,估算为飞机增重200 kg左右[15]。目标飞机最大起飞质量77 000 kg,增重比0.26%。增重200 kg会为A320-200飞机航行1 000 n mile(1 n mile=1.852 km)增耗大约11.7 kg的燃油[2]。由图15所示,在地面滑行阶段,利用AETS代替主发驱动滑行10 min时节省消耗的燃油大约70 kg。所以,利用AETS代替主发驱动飞机滑行在民用航空行业的绿色发展方面有巨大收益。
4 结 论
随着国人环保意识的日益增强,利用低速运转主发驱动飞机地面滑行不利于绿色航空的发展,电动滑行或许是解决途径之一。本文利用MATLAB/Simulink对基于A320-200飞机的电动滑行系统进行了仿真研究,从仿真的角度初步验证了电滑行技术的可行性和优异性。
1)仿真结果表明,所设计电滑行方案稳定性、驱动特性良好。AETS驱动目标飞机在北京首都国际机场某滑行道上进行地面滑行时,A320-200型客机APU发电机驱动飞机滑行最大速度可达17.7 km/h,虽小于现阶段主发驱动滑行平均速度30 km/h,但是大于拖车拖拉飞机于地面滑行平均速度15 km/h[6,18]。基本满足实际滑行要求。针对目标飞机,若想提高AETS驱动滑行最大速度,必须改装或加装APU,将其发电机功率提高至180 kW 左右。
2)基于一定测试滑行长度,利用AETS取代主发驱动飞机滑行。可节省75%以上的燃油消耗、减少86%以上的CO排放、94%以上的HC排放、67%以上的NOX排放。节能减排性能表现优异。
本文的工作可以为未来中国电滑行系统的设计提供一定的参考和借鉴。
猜你喜欢
小哥白尼(野生动物)(2021年3期)2021-07-21 02:28:38
小读者(2021年2期)2021-03-29 05:03:20
汽车观察(2018年10期)2018-11-06 07:05:28
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
探测与控制学报(2015年4期)2015-12-15 15:00:56
汽车维护与修理(2015年6期)2015-02-28 12:17:16