双偏振雷达和双频测雨雷达反射率因子对比
2020-09-09 01:43:40蒋银丰寇蕾蕾2陈爱军2王振会2楚志刚2胡汉峰2
应用气象学报 2020年5期
蒋银丰 寇蕾蕾2)* 陈爱军2) 王振会2) 楚志刚2) 胡汉峰2)
1)(南京信息工程大学大气物理学院, 南京 210044)2)(南京信息工程大学气象灾害预警与评估协同创新中心, 南京 210044)
引 言
降水既是水循环的重要环节之一,也是表征天气和气候变化最重要的指标之一。可靠的降水数据可以为全球范围内的水循环和天气预测提供重要信息,在水文模拟及天气预测中有很好的应用前景[1]。地基雷达(ground-based radar, GR)能以较高时空分辨率进行较大范围的降水观测[2]。星载雷达采用卫星平台,运行轨道高、观测视野广,可提供近全球范围的降水观测。TRMM(Tropical Rainfall Measuring Mission satellite)所携带的测雨雷达(precipitation radar, PR)是世界上第1部星载测雨雷达,GPM(Global Precipitation Measurement Mission)是继TRMM之后的全球降雨观测卫星计划,GPM主星已于2014年2月27日发射成功,其上搭载的星载双频测雨雷达(dual-frequency precipitation radar,DPR)采用双频率联合探测数据。相对于TRMM PR,GPM DPR探测范围更广,探测降水的精确度更高。地基雷达和星载测雨雷达是观测降水的两种重要手段,主要根据探测的反射率因子反演降水数据,由于扫描方式、探测波段等的不同,探测的反射率因子存在差异[3]。对DPR和地基双偏振雷达探测的反射率因子进行基于水凝物分类的对比,能更好理解两者探测数据的特征和两者探测数据存在差异的本质原因。
自从星载雷达投入使用,许多学者开展星载和地基雷达数据对比的相关研究。Liao等[4]利用网格匹配法将TRMM PR与美国佛罗里达州的WSR-88D多普勒天气雷达数据进行匹配对比,发现二者回波和降水数据一致性较好。王振会等[5]基于几何匹配法将TRMM PR与中国上海地基雷达进行时空匹配,发现TRMM PR探测的回波强度普遍大于GR,且可将星载雷达作为参考对地基雷达进行订正,提高天气雷达数据的准确度。Wen等[6]将TRMM PR与美国俄克拉荷马州的WSR-88D多普勒天气雷达数据进行对比,指出两者回波的偏差主要来自雨雹混合物、湿雪、霰和大雨。Munsung等[7]发现对DPR的校准偏差进行校正可减小DPR与GR的反射率因子差异。陈新涛等[8]针对DPR观测数据反演雨滴谱中的双值问题,提出通过匹配地面S波段天气雷达与DPR观测数据,为双值问题提供判断依据的方法。通过前人的研究可以发现,星载雷达数据稳定[9-10],星载与地基雷达数据的联合应用具有很大潜能[11-15],但数值上仍然存在差异,对于不同地区、不同波段的地基雷达,差异不同。
本文将DPR与C波段双偏振雷达的反射率因子进行基于水凝物分类的对比。首先,介绍星载与地基雷达数据、匹配算法、水凝物识别算法以及波段修正算法。其次,基于2015—2017年31对DPR和南京信息工程大学C波段双偏振雷达(简称CDP)匹配的反射率因子数据进行统计对比,定量分析因衰减和波段不同造成的差异。对CDP探测的反射率因子进行衰减订正;考虑到波段不同造成的差异与回波的水凝物类型有关,对匹配回波进行水凝物识别,并针对不同水凝物类型的回波进行波段修正。最后,对比经过衰减订正和波段修正后DPR与CDP探测不同水凝物的反射率因子,基于水凝物类型分析造成差异的原因。
1 数据及算法
1.1 数 据
本文使用的星载雷达数据为GPM DPR L2级第7版本的标准2A-DPR产品,是在L1级基数据基础上经过衰减订正、非均匀充塞订正等得到的产品[16]。GPM DPR发射Ku,Ka波段电磁波进行探测,Ku波段探测、Ka波段探测、Ku和Ka联合探测分别得到常规(NS)模式、高灵敏度(HS)模式和匹配(MS)模式的产品。NS模式工作波段是Ku波段,频率为13.6 GHz,天线扫描角范围±17°,扫描宽度为245 km,垂直分辨率为250 m,可探测的最小等效反射率因子约为18 dBZ。HS模式工作波段是Ka波段,频率为35.5 GHz,天线扫描角范围±8.5°,扫描宽度为120 km,径向分辨率为500 m,可探测的最小等效反射率因子约为12 dBZ。MS模式利用Ku和Ka双频进行相关参数反演[16]。由于分析DPR和CDP反射率因子差异时需要研究波段不同产生的差异,所以选择DPR NS模式和DPR HS模式两个单波段探测产品进行讨论。
地基雷达数据为CDP探测的体扫数据,整个体扫包括14个仰角上的圆锥扫描,每个锥扫的每个径向上有若干个库,每个库都有反射率因子、径向速度、速度谱宽、偏振参量等信息。工作波段是C波段,波长为5.3 cm,波束宽度为0.54°,距离分辨率为75 m。
1.2 匹配算法
反射率因子的匹配包括时间匹配和空间匹配。CDP完成一次体扫约需7 min,DPR扫过CDP探测范围的时间约为1 min,为了减少时间不匹配造成的误差,将DPR经过CDP时刻的7 min之内时间最接近一个体扫的GR数据作为匹配数据,即时间匹配。其次将DPR与CDP的反射率因子在空间上匹配。采用几何匹配法[17]:①选出距CDP最大探测范围约150 km内的DPR波束;②当DPR NS模式与CDP匹配,筛选DPR和CDP反射率因子均大于18 dBZ的点;当DPR HS模式与CDP匹配,筛选DPR和CDP反射率因子均大于12 dBZ 的点;③将DPR和CDP波束相交区域内的反射率因子重采样到等距方位投影坐标,重采样的水平分辨率为DPR星下点的水平分辨率,约为5 km,垂直分辨率为距GR不同距离处的CDP波束展宽[5];④将每个分辨率体积内符合②中筛选条件的DPR和CDP反射率因子由dBZ转化为Z,并求平均值,再由Z转化为dBZ,作为此分辨率体积位置重采样的反射率因子。
1.3 水凝物识别与波段修正算法
DPR与CDP探测波段不同,当降水粒子尺度达到某一界限时会产生Mie散射效应,导致不同波段探测的回波出现偏差,且偏差随回波水凝物类型而变化。为减小这种差异,针对不同水凝物类型,使用波段修正,即将不同波段探测到的等效反射率因子转换为同一波段。
首先对回波类型进行识别,本文对匹配点上的GR数据进行水凝物识别,识别结果作为该匹配点的水凝物类型。结合双偏振雷达测得的偏振信息和零度层亮带高度信息,使用Park等[18]提出的双偏振雷达回波的水凝物识别算法对回波进行水凝物分类,水凝物类型包括杂波(地物(GC/AP)或生物(BS)引起的回波)、干雪(DS)、湿雪(WS)、冰晶(CR)、霰(GA)、大滴(BD)、中雨(RA)、大雨(HR)、雨雹混合物(RH)。其中,大滴是指雨滴大小分布倾向于大雨滴的降水,通常雨滴直径大于3 mm,小雨滴个数较少[18]。表1为除杂波外不同高度水凝物的分布。

表1 水凝物分布Table 1 Distribution of hydrometeors
其次拟合不同水凝物的波段修正曲线。波段修正算法:假设降水粒子的粒径分布符合Gamma分布[19],等效反射率因子计算公式为
(1)
(2)
基于T-矩阵法使用改进的Mie散射参量算法[20]进行Mie散射计算,通过式(1)计算C和Ku波段探测不同直径粒子的等效反射率因子,代入式(2)可得到DFR,拟合DFR随Ku波段等效反射率因子的关系曲线,将Ku波段等效反射率因子向C波段转换。
2 统计结果与分析
2.1 数据获取
对2015—2017年DPR和CDP数据进行筛选,筛选方法:①筛选出2015—2017年DPR轨道扫描经过CDP探测范围的DPR数据;②根据筛选出的DPR数据,基于时间匹配,得到匹配的CDP数据;③判断CDP与DPR扫描相交区域内CDP探测的反射率因子库数,若库数大于100,则符合筛选要求。经筛选,得到2015—2017年共31条符合筛选条件的DPR过境轨道,探测回波以层状回波为主。
2.2 衰减订正
DPR探测波段为Ku,Ka波段,CDP探测波段为C波段,探测回波均受衰减影响,为了减小衰减造成的匹配差异,对雷达数据进行衰减订正。DPR数据为L2级2A-DPR产品,已经过衰减订正处理。使用Kdp-ZH联合订正法[21]对CDP探测的反射率因子进行衰减订正,为了判断衰减订正效果,选择距CDP较近的南京龙王山S波段雷达(简称SR)的探测结果作为参考[22],S波段雷达探测的回波受衰减影响很小,可忽略不计。由于CDP和SR的探测分辨率不同,无法直接对比,因此将CDP和SR反射率因子同时与DPR匹配,转化为同一分辨率进行对比以判断回波的衰减订正情况。
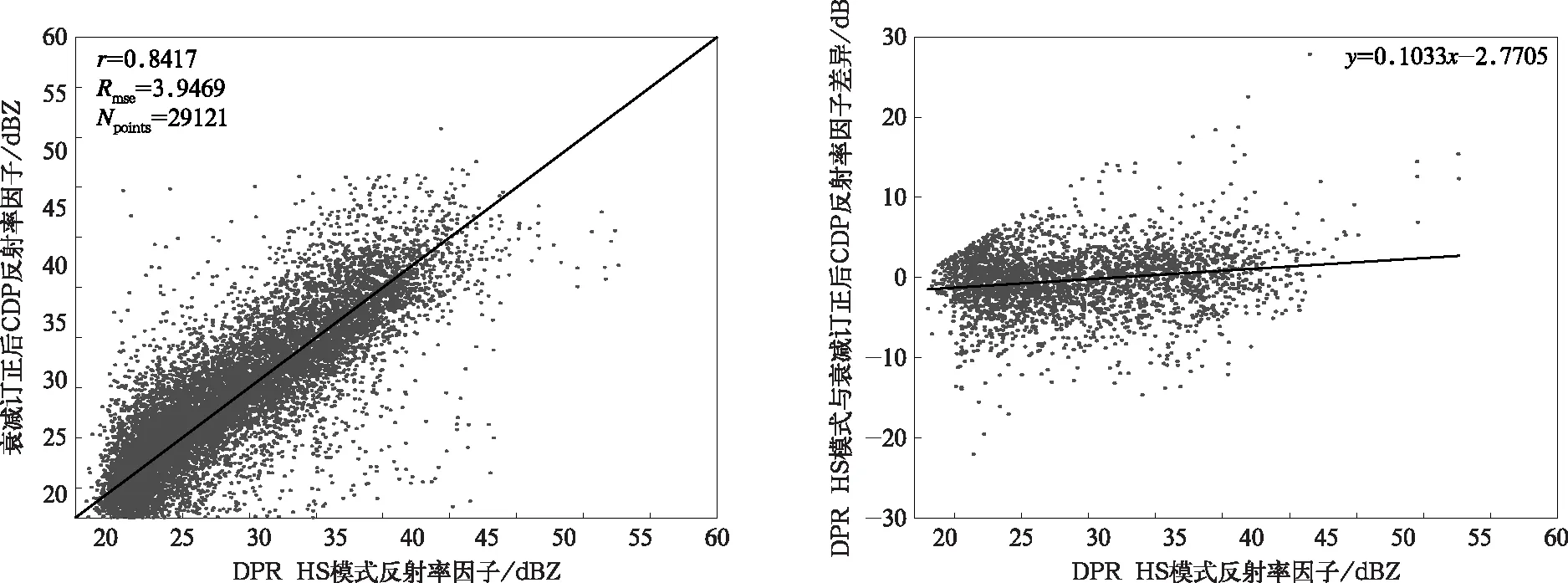
选择2015—2017年31对DPR和与之匹配的CDP,SR的反射率因子进行统计。DPR NS模式和HS模式反射率因子的探测阈值分别是18 dBZ和12 dBZ,为了提高匹配效果,设置与NS模式匹配时GR反射率因子阈值是18 dBZ,与HS模式匹配时GR反射率因子阈值是12 dBZ。当匹配点上DPR和GR探测的反射率因子均超过阈值,则为有效匹配对。图1为DPR分别与衰减订正前后CDP,SR空间匹配回波的散点及差异散点图,图中r表示相关系数,Rmse表示均方根误差,Npoints表示有效匹配对数,散点图中的黑线为直线y=x,差异散点图中的黑线为误差随DPR反射率因子变化的拟合线,在差异散点图中散点分布均不超过一条斜直线,是由于设置的匹配阈值所引起。图1中相关系数均达到0.001显著性水平。
由图1可以看到,衰减订正后CDP与SR探测的回波散点分布型式一致性较好,且衰减订正后CDP与SR的回波差异拟合线斜率相近,表明衰减订正效果较好。由图1可以看到,DPR NS模式与衰减订正后CDP探测回波的一致性显著改善,相关系数由0.79提高至0.84,均方根误差由4.21 dB减小至3.54 dB;随着回波强度增加散点下偏程度较订正前减弱;差异拟合线斜率由0.31减小至0.20,表明DPR NS模式探测的平均回波强度大于CDP,二者偏差随着回波强度的增大而增大。
对比DPR NS模式和DPR HS模式探测结果(图1)可知,DPR NS模式散点整体下偏,在强回波处下偏严重;DPR HS模式散点在弱回波处下偏,随着回波强度的增加逐渐上偏,表明DPR NS模式能探测到更强的回波,但对弱回波的探测能力不足;DPR HS模式能探测到更弱的回波,但对强回波的探测能力不足。
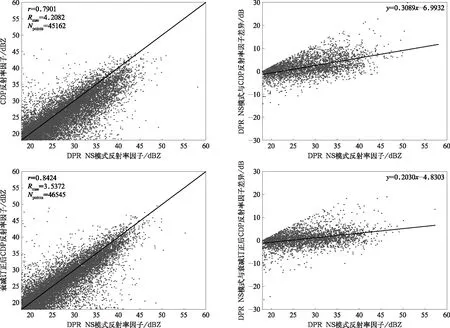
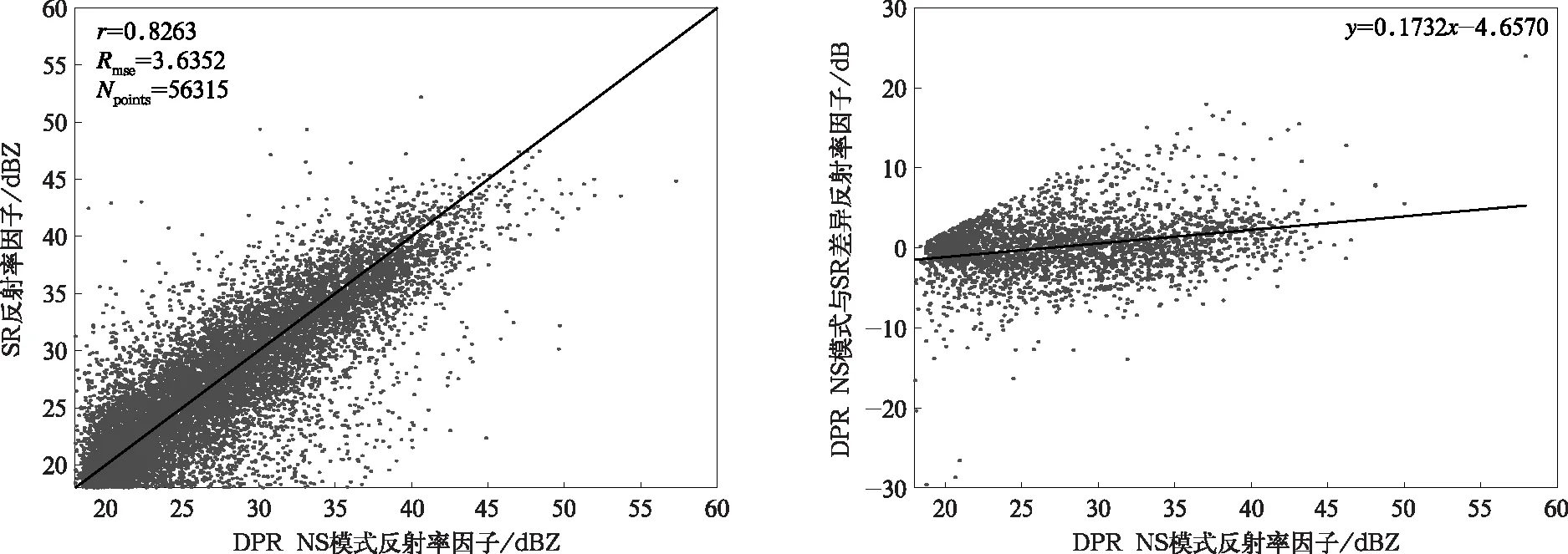
图1 DPR和GR反射率因子对比散点及差异散点Fig.1 Scatter plot and difference scatter plot of reflectivity factor of DPR and GR
续图1
2.3 波段修正
2.3.1 水凝物识别
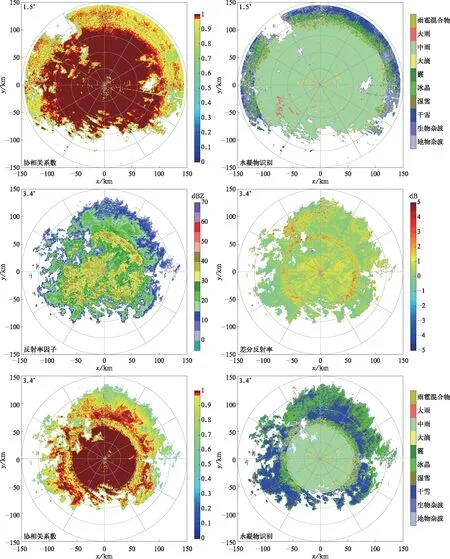
经过衰减订正,DPR与CDP匹配情况显著改善。考虑到不同类型水凝物在不同波段的后向散射截面不同,会导致DPR与CDP探测的等效反射率因子出现差异。由于DPR HS模式对强回波的探测能力不足,波段不同产生的差异在弱回波处较小,所以选择DPR NS模式与CDP进行不同水凝物反射率因子的对比。结合零度层亮带高度和反射率因子(Z)、差分反射率(ZDR)和协相关系数(ρ)3种偏振参数,使用Park等[19]提出的模糊逻辑算法对匹配点的水凝物类型进行识别。匹配点的零度层亮带高度通过DPR产品获得,DPR产品中包含零度层亮带高度;匹配点的偏振参数通过CDP数据获得,基于几何匹配法,将分辨率体积内CDP的Z,ZDR和ρ的平均值作为此分辨率体积位置重采样的偏振参数值。选择2016年10月26日00:25(世界时)左右CDP探测的数据作为个例分析水凝物识别效果,此次个例为台风海马(1622)外围引起的强降水天气过程。图2为1.5°和3.4°仰角下Z,ZDR,ρ以及水凝物识别的分布情况。可以发现零度层亮带上的ZDR较大,ρ较小。处于零度层亮带之上的冰晶、干雪下落至零度层亮带后开始融化,形成外包水膜,非球形程度增加,使Z增大,ZDR增大,ρ减小。随着高度的下降融化成液态水凝物如雨滴,非球形程度减小,使ZDR减小,ρ增大,水凝物识别情况与Z,ZDR和ρ分布吻合,表明水凝物识别情况较好。
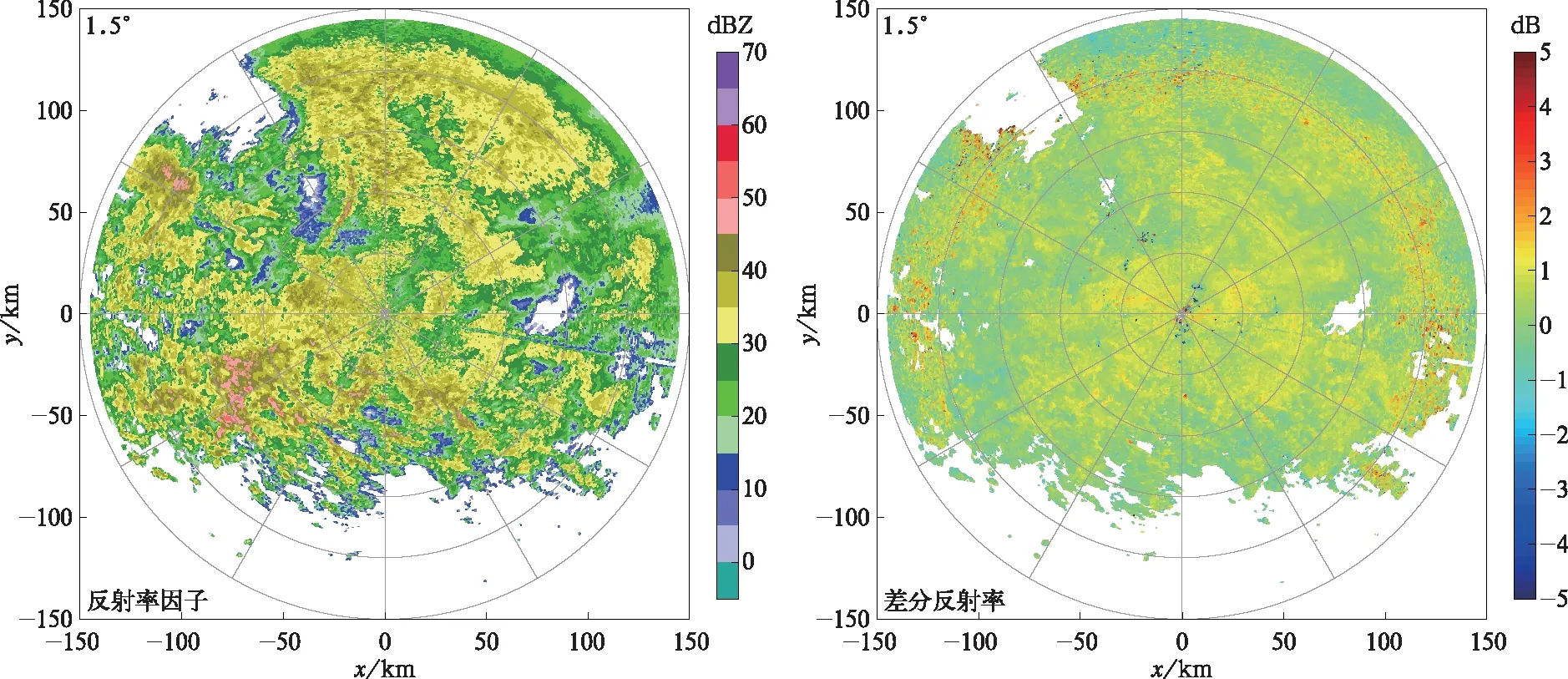
图2 2016年10月26日00:25南京信息工程大学C波段双偏振雷达不同仰角反射率因子、差分反射率、协相关系数、水凝物识别分布(相邻距离圈间隔为30 km)Fig.2 Z,ZDR,ρ,hydrometeor distribution of CDP at NUIST with different degrees at 0025 UTC 26 Oct 2016(the distance between adjacent range rings is 30 km)
续图2
2.3.2 波段修正
对DPR NS模式和衰减订正后CDP探测不同水凝物回波的差异进行波段修正。其中,干雪的波段修正公式适用于干雪和霰,湿雪的波段修正公式适用于湿雪和雨雹混合物,水的波段修正公式适用于中雨、大滴、大雨,冰的波段修正公式适用于冰晶[23]。在计算复折射指数时,当水凝物为水时,取温度为20℃,采用Ray[24]的方法;当水凝物为冰时,取温度为0℃,采用Matzler[25]的方法;当水凝物为水冰混合物时,采用Bohren等[26]的方法,本文设置干雪为水冰体积比为1:9的混合物,湿雪为水冰体积比为1:1的混合物,从Wen等[6]和Cao等[23]的研究可知,不同波段探测雪的DFR对密度因素不敏感,对形状因素较敏感,不同水冰体积比的雪的DFR差异很小。图3是Mie散射计算的C和Ku波段下不同直径粒子DFR随Ku波段等效反射率因子变化的连线,连线出现折点是因为相邻直径的DFR出现较大变化引起。对图3中不同水凝物DFR随Ku波段等效反射率因子变化的曲线进行拟合,拟合公式形式为
(3)
式(3)中,ai(i=1,2,…,n)表示拟合系数。4种水凝物拟合系数见表2。通过不同水凝物的拟合公式计算DFR,将Ku和C波段探测的等效反射率因子转换为同一波段进行比较。
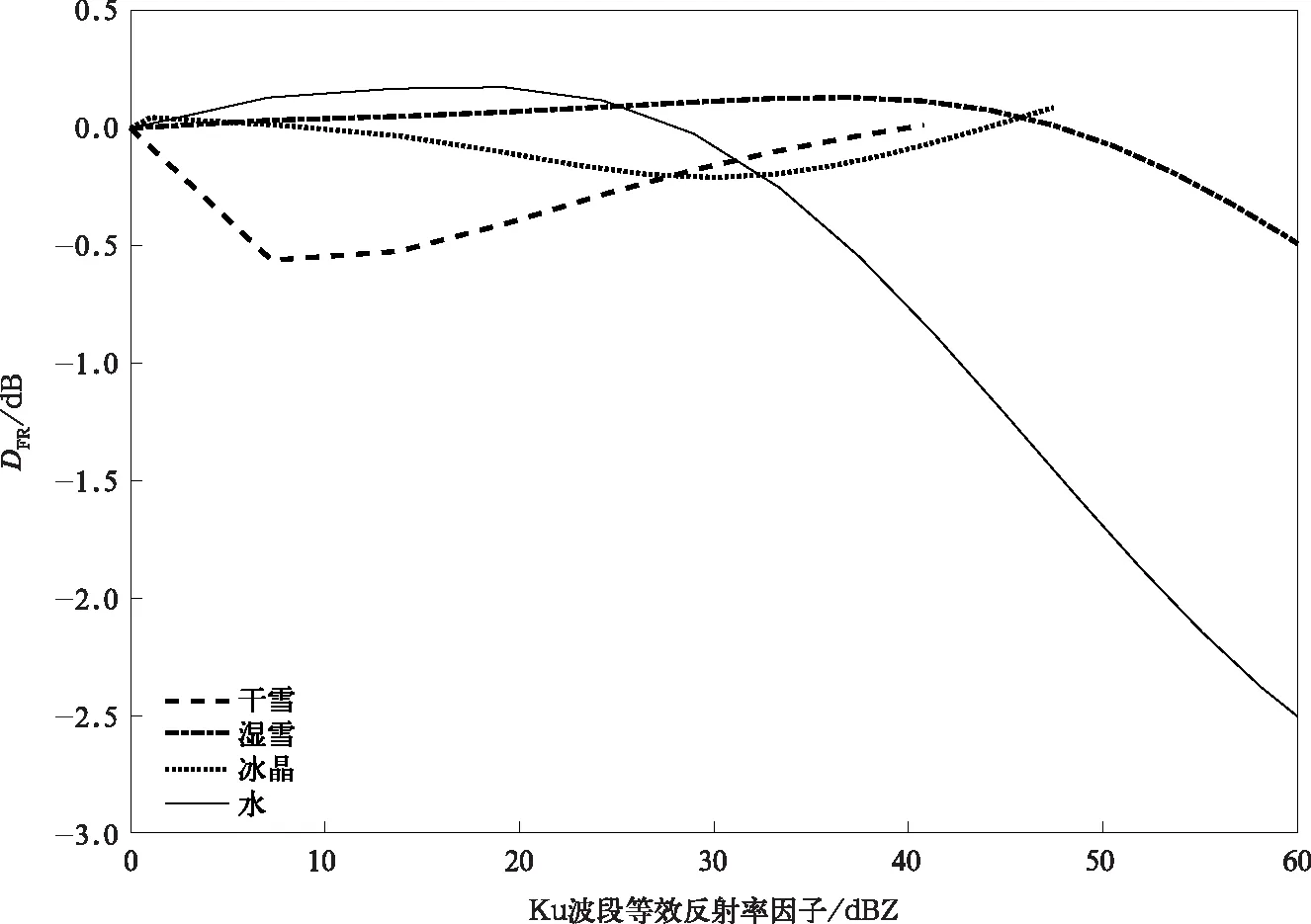
图3 不同水凝物的DFR与ZKu的关系Fig.3 DFR of different hydrometeors varing with ZKu

表2 拟合系数Table 2 Fitted curve coefficients
波段修正后除杂波外DPR NS模式与CDP匹配点上不同水凝物的对比散点及概率密度分布(probability density function,PDF)如图4所示,除大雨散点外,均达到0.001显著性水平。图5为波段修正后各水凝物及整体回波的统计指标折线。各水凝物数量从多到少依次是中雨、干雪、湿雪、冰晶、霰、大滴、大雨,雨雹混合物的识别点数为0,本文不作讨论。DPR 模式和CDP探测湿雪、霰、大滴和中雨回波的相关系数较高,均超过0.85,回波分布型式一致性较好,均方根误差均小于4 dB,回波强度的差异较小,与T-矩阵法研究的C和Ku波段等效反射率因子差异一致。DPR NS模式和CDP探测干雪回波的相关系数相对较低,一个可能原因是受干雪的几何形状影响,双偏振雷达在水平和垂直方向观测到干雪的几何形状不同,导致探测的反射率因子出现偏差;另一个可能的原因是干雪复杂的几何形状使Mie散射模拟结果与实际情况不同[7],导致波段修正的订正量偏小。冰晶回波的相关系数较低,由图4可见,DPR NS模式探测的冰晶回波远大于CDP,这是因为冰晶一般位于零度层亮带之上,GR有效照射体积充塞不足,探测远距离处回波的准确性难以保证,使得GR探测的反射率因子偏小。探测大雨回波的相关性较差,由大雨回波的概率密度可见,CDP探测的大雨回波均大于40 dBZ,而DPR NS模式探测的大雨回波中有一部分小于40 dBZ,表明DPR NS模式探测大雨回波时存在低估,与Liao等[27]研究的结果一致;此外,大雨回波的点数过少,数据缺少代表性,对大雨回波的差异分析也有一定影响。总体而言,经过波段修正后二者匹配情况进一步改善,相关系数提高至0.86,均方根误差减小至3.33 dB,整体回波得到较好的订正,干雪、冰晶与大雨回波对二者匹配情况影响较大。波段修正的订正量小于衰减订正的订正量,衰减是影响匹配情况的主要因素,波段修正在衰减订正基础上进一步改善匹配情况。
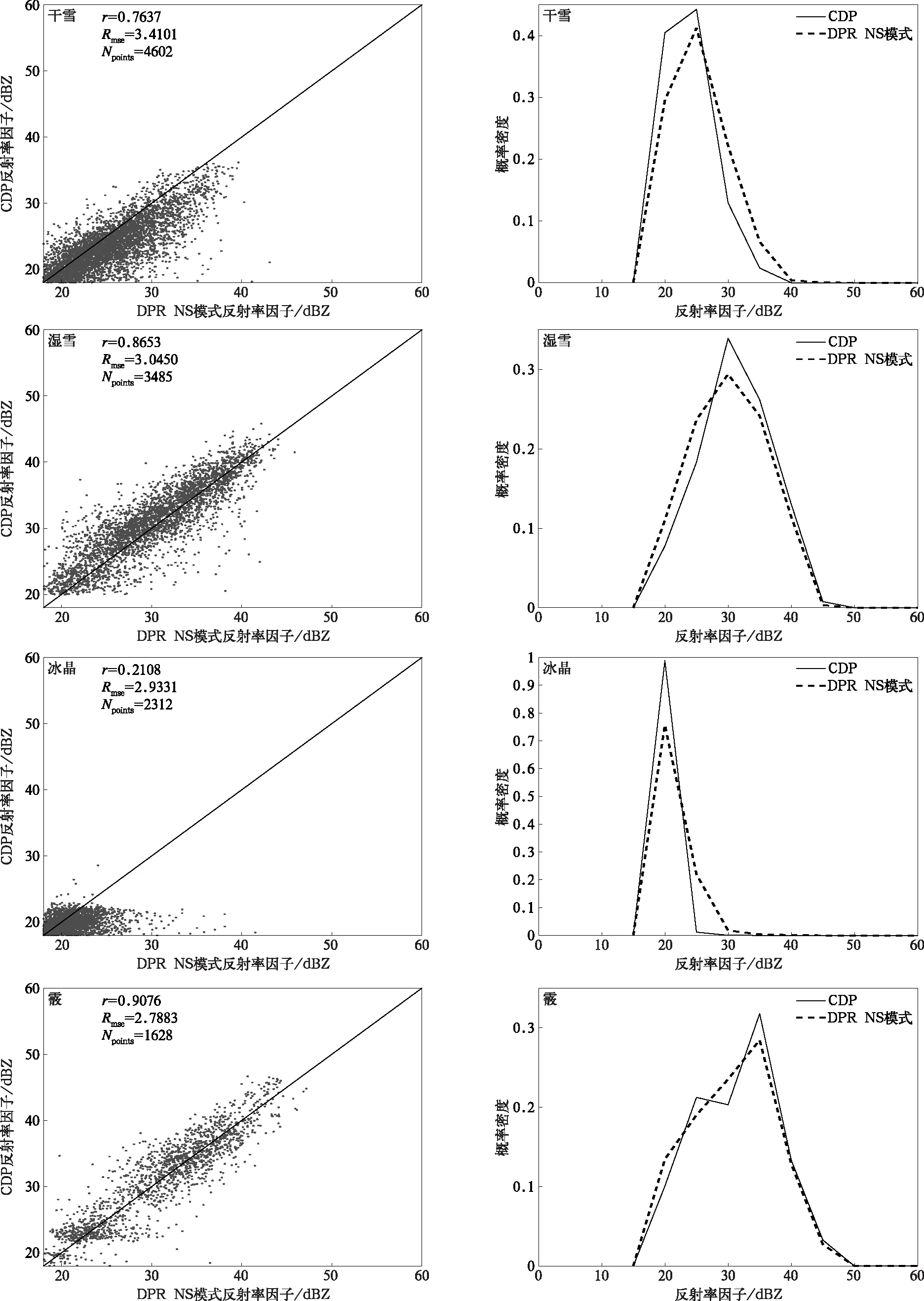
图4 波段修正后不同水凝物对比散点以及概率密度分布Fig.4 Scatter plot and probability density function of different hydrometeors after band correction

续图4
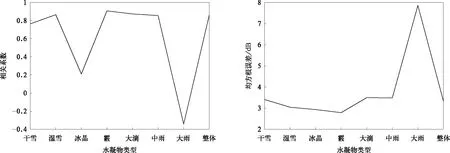
图5 波段修正后不同水凝物统计参数Fig.5 Curves of statistical parameters of different hydrometeors after band correction
3 结论和讨论
对2015—2017年时空匹配的DPR和CDP反射率因子进行统计,得出以下结论:
1) DPR与CDP探测回波的整体一致性很好,经过衰减订正和波段修正,回波相关系数从0.79提高到0.86,达到0.001显著性水平,均方根误差从4.20 dB减小到3.33 dB。造成二者差异的主要因素是衰减和波段不同导致的后向散射截面不同。
2) 基于T-矩阵法针对不同水凝物回波进行波段修正,二者探测湿雪、霰、大滴和中雨回波的相关系数较高,均方根误差均小于4 dB,回波强度的差异较小。因为干雪复杂的几何形状,使得二者探测干雪回波的相关系数较低,模拟干雪的反射率因子需进一步研究。由于星载雷达探测分辨率以及地基雷达有效照射体积充塞不足,二者探测大雨和冰晶回波的相关性较差。两者探测的差异主要是由干雪、大雨和冰晶回波造成的。
3) DPR NS模式和DPR HS模式存在差异。DPR NS模式能探测到更强的回波,对强回波敏感,对弱回波的探测能力不足;DPR HS模式能探测到更弱的回波,对弱回波敏感,对强回波的探测能力不足。
由S波段和C波段多普勒雷达组成的中国单偏振天气雷达网,在业务中发挥着重要作用,国内单偏振天气雷达将在未来进行双偏振技术升级,双偏振雷达已成为天气雷达发展趋势。我国也在发展自己的星载双频测雨雷达[28],星载双频测雨雷达和双偏振雷达数据的相互验证,可为我国星载双频测雨雷达的数据处理和验证提供参考和技术支撑。
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
印制电路信息(2022年11期)2022-11-30 03:40:58
海洋通报(2022年4期)2022-10-10 07:40:26
光谱学与光谱分析(2022年4期)2022-04-06 03:44:38
电子制作(2019年12期)2019-07-16 08:45:20
测控技术(2018年6期)2018-11-25 09:50:24
电子器件(2017年2期)2017-04-25 08:58:37
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:15
高师理科学刊(2016年8期)2016-06-15 20:27:45
西藏科技(2015年4期)2015-09-26 12:12:58