1.2 km标准基线环境参数自动测量系统研制
2020-09-08 08:44刘学德缪东晶张京燕李连福李建双张福民
计量学报 2020年8期
刘学德, 缪东晶, 张京燕, 李连福,李建双, 张福民, 李 萍
(1.天津大学精密仪器与光电子工程学院,天津300072;2.中国计量科学研究院,北京100029)
1 引 言
空气折射率修正是提高激光测距精度的关键因素[1~4],尤其是修正的实时性。在野外测距时,考虑到可操作性,环境参数法是普遍采用的计算折射率的方法[5~7],因此环境参数实时准确获取是非常重要的。为实现高精度的空气折射率修正,德国联邦物理技术研究院(Physikalisch Technische Bundesanstalt,PTB)在其600 m标准基线建立野外环境参数测量系统[8],进行温度、湿度和气压3种类型的环境参数采集,共包括68个传感器,采集周期约为30 s。至2017年,中国计量科学研究在北京昌平院区研制的1.2 km环境参数测量系统[9,10],共有76个传感器,涵盖温度、湿度、气压3种环境参数,采集周期约为12 s。
近年来随着长度计量的发展,在野外如能更准确补偿空气折射率,长距离测量的不确定度有望降低到10-7量级[11,12]。为了进一步提高野外测量时的空气折射率补偿精度,对1.2 km环境参数自动测量系统进行了改进升级,增加二氧化碳、风速以及风向参数的采集功能,并通过优化软硬件,进一步提高系统的实时性和准确性,以便提高空气折射率修正精度。
2 环境参数自动测量系统硬件组成
环境参数自动测量系统硬件由5种类型传感器和辅助设备两部分组成。图1为测量系统布局图;图2为系统各类传感器和辅助设备的硬件连接图。
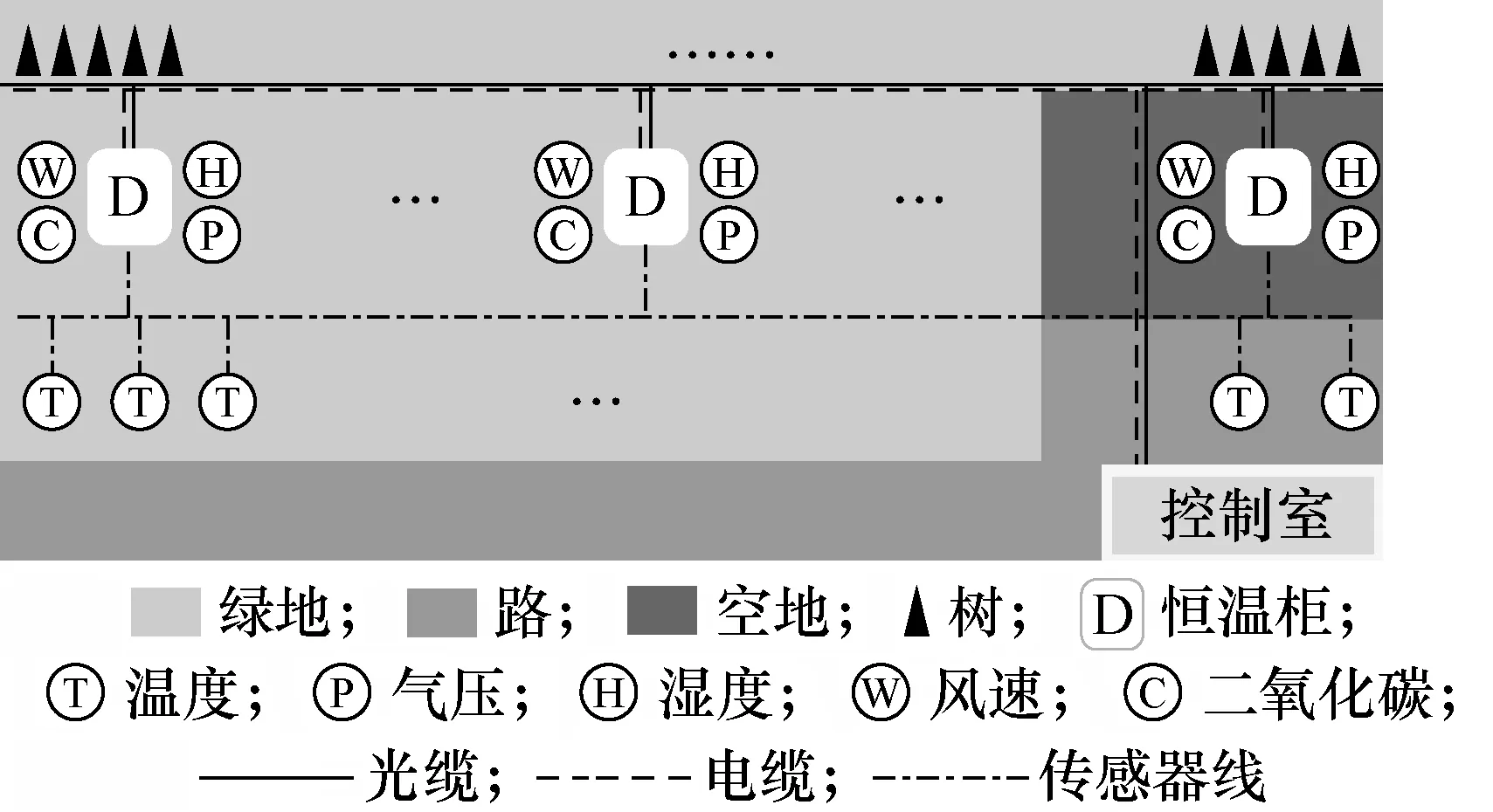
图1 环境参数自动测量系统布局图Fig.1 Layout of environmental parameter automatic measurement system

图2 系统硬件连接图Fig.2 Diagram of system hardware connection
测量系统根据温度、湿度、气压、二氧化碳对测距产生影响程度的不同[13~15],选取一定数量的各类传感器分布在1.2 km基线沿线。采用的5种类型的传感器分别是:铂电阻式的温度传感器、湿敏电容型的湿度传感器、硅电容式压力传感器、超声波式的风速传感器、硅基型的二氧化碳传感器;还有与各传感器相对应的数据接收设备。其中,温度传感器共60个,以20 m为间隔,均匀地分布在同一测线上与光路等高位置;以100 m的间隔设置13个恒温柜,在恒温柜附近,布置13个湿度传感器;在基线的起始位置,中间位置以及尾部位置均安装1个气压传感器,1个风速传感器和1个二氧化碳传感器。共计82个传感器,形成密集的传感器阵列,布置在1.2 km标准基线沿线。
测量系统的辅助设备包括恒温柜、地址转换器、以太网转串口设备、交换机、上位机以及相关的设备线,各辅助设备连接方式见图2。设置恒温柜的目的是创造恒温的工作环境,提供给各硬件设备良好的使用环境;地址转换器主要是给各传感器设置地址和改变数据的通讯协议;采用以太网转串口设备目的是将串口数据转换为网络数据,该设备数据传输速率到达1×108b/s,提供双串行接口;交换机提供数据传输和网络通讯功能。
3 分组并行采集改进方案
环境参数自动测量系统将传感器分成多组,采用并行方式同时采集各传感器组环境参数,实现数据高速采集。
3.1 硬件改进
影响系统采集速率的因素有:传感器自身响应时间及数据排队等待传输时间。传感器的数据传输是串联方式。每个传感器的数据都是通过一个数据传输设备传输到上位机,必须等待上一个传感器数据传输完成后才能进行下一个传感器的数据的传输,其它传感器均处于等待状态,大大降低自动测量系统的实时性。
为提高数据传输速率,环境参数自动测量系统采取一种分组并串联结合方式,即各组间测量数据并联传输,组内测量数据串联传输。将系统所有传感器分成14个组,为每一个传感器组配置一个以太网转串口的数据传输设备。测量系统配置7个该设备,同时对14个传感器组的数据进行并行采集,直接存入上位机,降低数据排队等待时间,实现数据快速采集。
图3为硬件连接示意图,根据系统分组设计的方案,将硬件设备分成14个组,图3为系统单个组硬件连接方式,由于不是每个组均包含5类传感器,每个组实际传感器种类和数量根据实际需要配置。

图3 硬件连接示意图Fig.3 Schematic diagram of hardware connection
3.2 软件改进
软件采用模块化开发,设计14个子模块分别对应硬件的14个传感器组,并行采集各组数据;并通过主控程序管理各个子模块,图4为软件设计流程图。

图4 软件流程图Fig.4 Software flow diagram
子模块功能分为3个部分:①串口通信部分。通过串口,实现软件和硬件之间的数据发送与接收。②数据处理部分。将接收的字符串数据根据各传感器类型进行分类处理,转换为可识别的环境参数数据;③存储部分。将传感器配置信息和采集数据存储到数据库中。
系统主控程序监控子模块以及传感器运行状态,显示环境参数采集状况。包括4个部分:①子模块管理部分。控制子模块运行,分配传感器地址,传感器错误类型提示和子模块通断提示。②实时监控部分。以曲线的形式动态地显示1.2 km沿线的环境参数变化情况。③历史查询部分。查看指定时间段内的环境变化情况。④存储云端部分。环境数据存储到云端数据库,共享给其它测量设备使用。
4 系统测试与测试结果分析
4.1 基线温度场分析
选取基线具有代表性的温度数据,即温度变化剧烈和温度变化平缓各一天的数据,分析基线测线上的温差变化情况,图5是基线阴天(2019年5月18日)的温度变化情况,图6是基线晴天(2019年6月9日)的温度变化情况。

图5 基线阴天温度变化曲线图Fig.5 Baseline cloudy temperature curve

图6 基线晴天温度变化曲线图Fig.6 Baseline sunny temperature curve
从图5和图6可知,阴天基线温度变化相对平缓,在18.3 ℃~20.6 ℃范围内波动,晴天基线温度在19.5 ℃~32.0 ℃范围内变化,且变化剧烈呈现快速上升和下降趋势。温度相邻采样间隔变化量很大,因此,采集速率就变得异常关键,即采集的实时性。提高测量系统参数采集的实时性,可有效监控基线沿线环境变化情况,提高折射率实时补偿性能,降低延时引入的测量误差。
4.2 实时性分析
系统的实时性通过各传感器的采集速率来分析,采集周期即同一传感器相邻2次数据采集的时间间隔。选取系统改进后的环境参数数据,分别计算出每个传感器最大采集周期,统计出各类传感器中采集时间间隔较大的传感器各3个。图7是各类传感器采集周期图,图7中横轴表示选取的各类传感器样本,纵轴表示采集周期。
由图7可知,系统改进之后,温度传感器最大采集周期不超过6.987 s,湿度传感器最大采集周期不超过6.986 s,气压传感器最大采集周期不超过6.987 s,由此可得出,系统总体采集周期不超过7 s。与系统改进之前相比,采集周期从12 s降低到7 s,大幅度降低了采集周期。且全天温度、湿度、气压采集总数从原来的40万条增加到113万条,正确率高于98%。
4.3 延时影响分析
系统实时性的提高,为温度延时温差分析和折射率修正误差分析提供可行性基础。在野外温度是影响折射率修正最显著的参数,温度延时误差直接影响折射率修正结果。

图7 传感器采集周期图Fig.7 Sensors acquisition cycle diagram
现对温度变化平稳(图5)和温度变化剧烈(图6)的基线温度数据进行分析,分别计算7 s延迟时,相邻两次采样间隔温度变化量,记为延时温差,并绘制延时温差图。图8为基线阴天和晴天延时温差图。

图8 基线阴天和晴天延时温差图Fig.8 Delay temperature difference diagram of baseline cloudy day and sunny day
分析图8可知,阴天(图8(a))延时温差不大于0.06 ℃,晴天(图8(b))延时温差不大于0.20 ℃,晴天的温差变化量明显高于阴天。且在阴天和晴天均可找到温差较小的时段(见图8中的小框),在此时段测量,可将空气折射率修正延时误差显著降低,从而提高测量精度。
取温度变化平缓(图5)和温度变化剧烈(图6)时的同一个传感器24 h内的温度数据为例,分析温度延时对折射率修正的影响。统计该传感器采样间隔7 s时的延时温差,并绘制延时温差图。图9是该温度传感器阴天和晴天时的延时温差图。
比较分析单个传感器阴天(图9(a))和晴天(图9(b))延时温差,晴天延时温差波动更加剧烈。现就晴天温差变化较大数据进一步分析,分别截取曲线中不同时段,时段长30 min的温度数据,计算温度在7,14,21,28 s的温度最大变化量,表1是延时温差统计结果。

表1 延时温差表Tab.1 Delay temperature difference table
由表1可看出,野外自然条件下,不同时段温度变化不同,延时引入的折射率修正误差也不同。根据温度与折射率间关系[7],在气压为1 013.25 Pa,湿度为60%时,温度每1 ℃的变化引起折射率变化量为1.02×10-6。当延时时间为7 s时,最大延时温差不超过0.185 ℃,引入的折射率修正误差小于1.89×10-7;晴天理想测量时段最大延时温差为0.046 ℃,引入的折射率修正小于4.7×10-8。

图9 单个传感器阴天和晴天延时温差图Fig.9 Delay temperature difference diagram of single sensor on cloudy day and sunny day
5 结 论
1.2 km的长距离环境参数自动测量系统可以实时监测基线沿线温度、气压、湿度、二氧化碳以及风速等环境参数变化情况。系统采用分组并行采集方式改进后,采集的正确率提高到98%以上,采集周期降低在7 s以内。
优化后的1.2 km环境参数自动测量系统,提高了空气折射率补偿实时性,在基线理想的时间段,最大延时温差小于0.05 ℃,折射率修正误差小于5×10-8。该测量系统为长距离测量仪器的检定、标准基线测量提供了准确的环境参数实时修正,降低了修正误差。
猜你喜欢
物理通报(2020年8期)2020-08-13
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29
自动化学报(2019年12期)2020-01-19
河南畜牧兽医(2020年23期)2020-01-10
中学生数理化·八年级物理人教版(2019年11期)2019-09-10
儿童故事画报·发现号趣味百科(2019年4期)2019-05-10
电子制作(2019年7期)2019-04-25
电子制作(2018年23期)2018-12-26
猪业科学(2016年3期)2016-01-31
安徽冶金科技职业学院学报(2015年3期)2015-12-02