“蛟龙”号载人潜水器的布放回收系统及其关键技术
2020-09-08 00:29:18鲁德泉李德威杨磊刘保华
海洋开发与管理 2020年8期
鲁德泉,李德威,杨磊,刘保华
(国家深海基地管理中心 青岛 266237)
0 引言
随着各国大力推进海洋探索和开发进程,各类潜水器技术得到迅速发展。潜水器母船的布放回收系统负责完成潜水器在母船与海水中的转移,为使潜水器在恶劣海况下顺利开展下潜作业,布放回收系统必须具备抗大风浪的能力[1-7]。目前布放回收系统在无人潜水器领域已获得广泛应用,其升沉补偿功能趋于成熟[8-19]。随着“海马”号和“海龙”号等无人潜水器的研制和应用,我国对无人潜水器的布放回收系统开展大量研究工作[15-19]。
与无人潜水器相比,载人潜水器具有更大的重量和外形尺寸,更重要的是具有“载人”的性质,因而其布放回收系统须具有更高的安全性和可靠性。目前世界上共有5个国家拥有深海载人潜水器,这些潜水器分别是美国的“阿尔文”号、日本的“深海6500”号、俄罗斯的“和平1”号和“和平2”号、法国的“鹦鹉螺”号以及我国的“蛟龙”号。其中:“阿尔文”号主要由“亚特兰蒂斯”号母船搭载,该母船利用船尾的A 形架完成潜水器的布放回收作业,其尾部的机库通过轨道与吊架连接,以便将潜水器从吊架位置移送至机库进行保养和检修,同时通过计算机控制的动力定位系统抵抗恶劣海况的影响;“和平1”号和“和平2”号由同一艘母船搭载,由布置在舷侧的吊车完成布放回收作业,二者可同时下潜,通过相互配合可完成更多和难度更大的工作。我国部分高校陆续开展载人潜水器布放回收系统的理论研究工作[20-22],但尚未应用于实践。
“蛟龙”号载人潜水器是我国首台载人潜水器,其搭载母船与布放回收系统均经过严格的调研和方案设计。“蛟龙”号载人潜水器的布放回收系统设置于母船的后甲板,采用A 形架式的吊放方式,并由拖曳绞车和升降轨道车辅助,具备潜水器三级海况布放和四级海况回收的作业能力,目前已完成近200次的海上布放回收任务,为“蛟龙”号开展下潜作业提供有力支持。
1 系统组成
“蛟龙”号载人潜水器的布放回收系统由A 形架、拖曳绞车和升降轨道车等部分组成,其中A 形架和拖曳绞车共用1套液压系统和控制系统,实现拖曳绞车和A 形架主吊缆的联动控制。
1.1 A形架
A 形架是潜水器布放回收系统的主要装备,通常布置在母船后甲板的尾部,可在舷内摆35°和舷外摆48°的范围内工作,实现潜水器在升降轨道车和海面之间的位置转换(图1)。
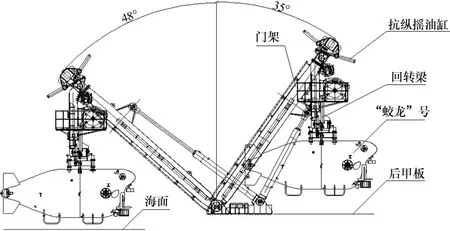
图1 A 形架的主要结构
A形架主要由门架和回转梁组成。门架是A 形架的主要结构载体,主要由2根等长的支腿和横梁组成,横梁与支腿之间由螺栓固定连接,每根支腿由1个长行程油缸驱动,实现A 形架在舷内、外的摆动动作。回转梁垂直悬挂在门架横梁的两枢轴轴承座上,“蛟龙”号载人潜水器通过主绞车的主吊缆和万向架的锁紧装置悬挂在回转梁的底部。2个抗纵摇油缸的一端固定在门架横梁上,另一端固定在回转梁上,当A形架摆动或海况较差时,回转梁和潜水器在布放过程中可具有纵向的自稳定能力。
回转梁的主要结构如图2所示。
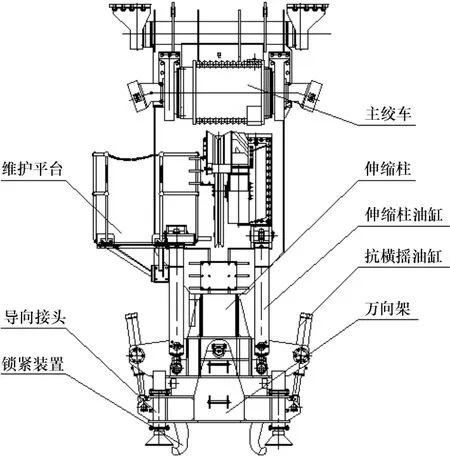
图2 回转梁的主要结构
回转梁由主绞车、维护平台、伸缩柱和万向架等部分组成。主绞车安装在回转梁的舷内侧,绞车卷筒由2台液压马达/行星齿轮箱驱动组件驱动,适用于68 mm 直径的主吊缆,可实现潜水器的布放回收。伸缩柱和万向架通过2个双作用的伸缩柱油缸与回转梁连接,由箱式线性轴承作为导向机构,该轴承包含石墨填充酰胺纤维材料制作的导向器,在提升和放出主吊缆时保持主吊缆与绞车卷筒的正确对中。
万向架安装在伸缩柱底侧的2个枢轴上,2个抗横摇油缸的一端安装在伸缩柱底侧,另一端安装在万向架顶部两侧,以保证万向架在潜水器布放回收过程中的稳定性。万向架底部有4个导向接头,其中2个导向接头为平面,另外2个导向接头为锥形口;4个导向接头与潜水器顶部的导向器互相配合,以保证潜水器与万向架的正确对中,从而使万向架上的锁紧装置能够准确和迅速地将潜水器和万向架锁紧在一起;4个导向接头均设计缓冲结构,以防止潜水器在与万向架对接的过程中受到过大的冲击力,同时抵消较大的对接偏差对对接过程的影响。
锁紧装置由2个油缸独立驱动2个锁紧钩的动作。执行锁紧动作后,锁紧钩锁紧在潜水器顶部的2根销轴上,使潜水器与万向架无间隙地固连在一起,此时可将主吊缆放松,由万向架承受潜水器的重量。
1.2 拖曳绞车
拖曳绞车位于母船的后甲板,沿船艏方向距A 形架20 m,在横向上处于后甲板的左舷位置。在潜水器布放回收的过程中,拖曳绞车与主吊缆配合作业,可发挥潜水器止荡和稳定的作用,实现在恶劣海况下开展潜水器布放回收作业。拖曳绞车由绞车卷筒、拖曳缆绳、导向滑轮和笼头缆组成(图3)。
拖曳缆绳通过2组导向滑轮的换向后,与A 形架和“蛟龙”号载人潜水器的中心线对中,其末端通过笼头缆与潜水器连接在一起。笼头缆两端均有锁钩,其一端的锁钩与拖曳缆绳的锁环连接,另一端的锁钩锁住潜水器上的销轴。
在布放作业前,将笼头缆连接到潜水器上,当潜水器布放到后甲板尾部时,由布放人员将拖曳缆绳与笼头缆连接,在主吊缆和拖曳缆绳的共同拉力作用下,潜水器可被稳定地布放到水面,随后由蛙人将主吊缆和笼头缆从潜水器上解下,潜水器即可自由下潜。
在回收作业前,将笼头缆连接到拖曳缆绳上,当潜水器浮出水面时,由蛙人将笼头缆和主吊缆连接到潜水器上,在主吊缆和拖曳缆绳的共同拉力作用下,潜水器随A 形架回摆至后甲板尾部,由布放人员将笼头缆从潜水器上解下,随后潜水器可被主吊缆回收至万向架底部,由万向架锁紧装置锁紧。

图3 拖曳绞车的主要结构
1.3 升降轨道车
升降轨道车位于母船的后甲板中部,与A 形架对中,不仅可作为潜水器日常存放、保养和检修的载体,而且可在潜水器布放回收系统中发挥转移工位的作用。升降轨道车主要由潜水器支架、升降油缸、行走轨道、行走齿轮、行走马达、防翻钩、固定架和活动架组成(图4)。
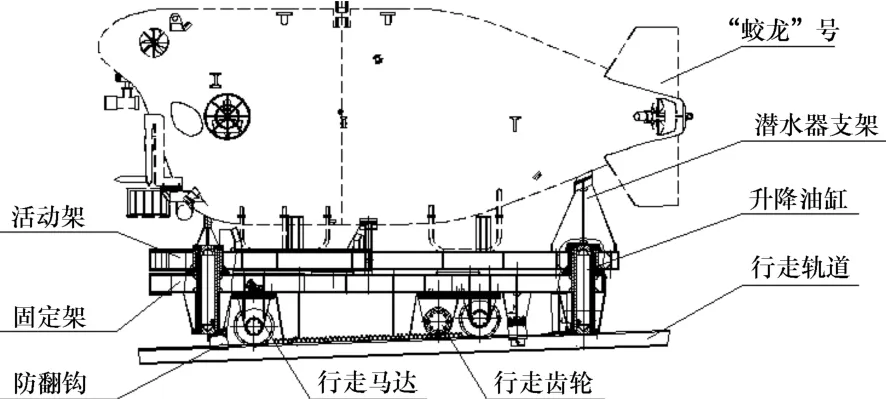
图4 升降轨道车的主要结构
潜水器支架均布于活动架上,其高度和位置按照“蛟龙”号的底部弧度进行设计,使潜水器支架顶部平面与“蛟龙”号底部紧密贴合,使“蛟龙”号在存放工位与布放回收工位之间转换的过程中保持稳定。行走轨道由存放工位延伸到布放回收工位,使升降轨道车在行走马达和行走齿轮的驱动下完成在2个工位之间的移动。
升降轨道车具有升降功能,其主体设计包括活动架和固定架2个部分。当升降油缸升高时,活动架随之升高,并将“蛟龙”号升高到需要的高度,以满足布放回收作业的要求。
2 关键技术
2.1 升沉补偿
在“蛟龙”号载人潜水器的布放回收过程中,能否经受住恶劣海况的考验是判断布放回收系统能否正常工作的关键。恶劣海况不仅会造成整个A 形架系统随母船在海面上晃动,更重要的是当“蛟龙”号与海面接触而主吊缆仍与“蛟龙”号处于连接状态时,海面的急剧升沉会使“蛟龙”号频繁地从空中跌落,带来的冲击力会持续对主绞车马达造成损伤,甚至导致马达齿轮碎裂而失去提升动力,届时“蛟龙”号将无法回收到母船。因此,有效实现“蛟龙”号在海面的升沉补偿是布放回收系统的关键技术。
本研究以潜水器布放过程为例介绍升沉补偿技术,回收过程的步骤则完全相反。布放回收系统对“蛟龙”号的布放步骤如图5所示。
图5分别展示“蛟龙”号在布放过程中的3种状态:①图5(a)中,A 形架内摆至舷内极限工作位,“蛟龙”号由升降轨道车运送到A 形架万向架的正下方,并由万向架的锁紧装置固定在万向架底部;②图5(b)中,A 形架外摆至舷外极限工作位,此时“蛟龙”号仍由锁紧装置固定在万向架底部,而拖曳缆绳系固在“蛟龙”号头部;③图5(c)中,锁紧装置释放,“蛟龙”号在主吊缆的拉力下离开万向架并慢慢下移至海面,在此过程中同时受到拖曳缆绳的水平拉力。
由图5可以看出,在整个布放过程中,“蛟龙”号与布放回收系统的连接方式主要有2种:①当A 形架由舷内摆动至舷外极限时,“蛟龙”号由锁紧装置固定于万向架,此时“蛟龙”号与A 形架固结,可基本不受海况的影响;②当“蛟龙”号脱离万向架而被下移至海面时,其同时受到主吊缆和拖曳缆绳的拉力并随海面升降,此时布放回收系统的升沉补偿系统须减小“蛟龙”号在随海面升降的过程中给主绞车马达带来的额外负荷。
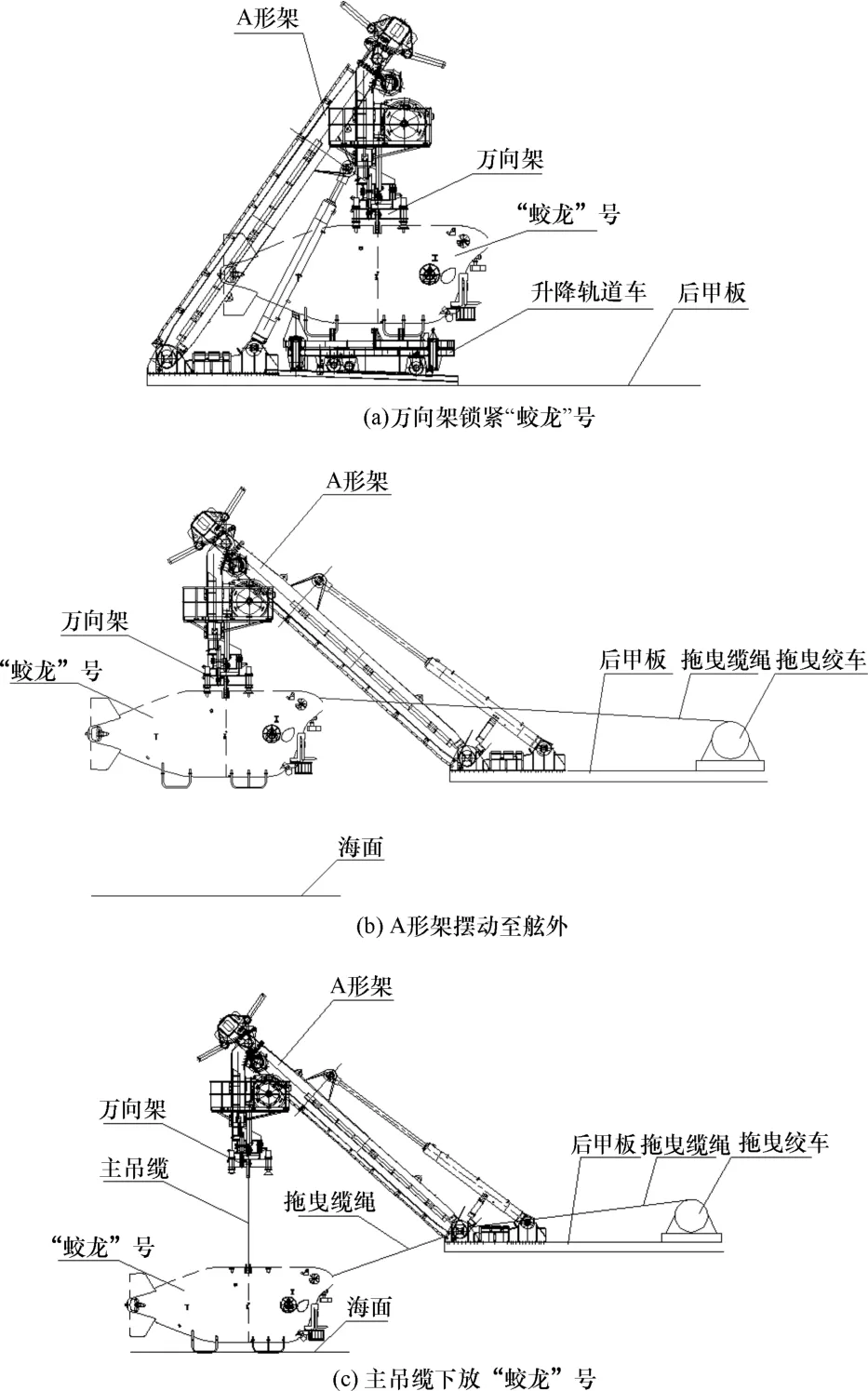
图5 “蛟龙”号的布放过程
2.2 恒张力液压控制系统
布放回收系统的升沉补偿主要由拖曳绞车和主绞车的恒张力控制来实现。当处于恒张力控制模式时,拖曳缆绳和主吊缆对“蛟龙”号的拉力被设定为恒定值,使拖曳缆绳和主吊缆始终处于张紧状态。当海面快速下降时,拖曳缆绳和主吊缆会在恒张力的作用下快速放出,放出的速度与“蛟龙”号因自身重力和母船晃动等因素造成的下降速度相当,从而抵消“蛟龙”号下降产生的加速度负荷;当海面快速上升使“蛟龙”号被抬高时,拖曳缆绳和主吊缆会在恒张力的作用下快速收回,使“蛟龙”号不会因海面快速下降而给主绞车马达带来额外的惯性负荷。
拖曳绞车的恒张力液压控制系统如图6所示。
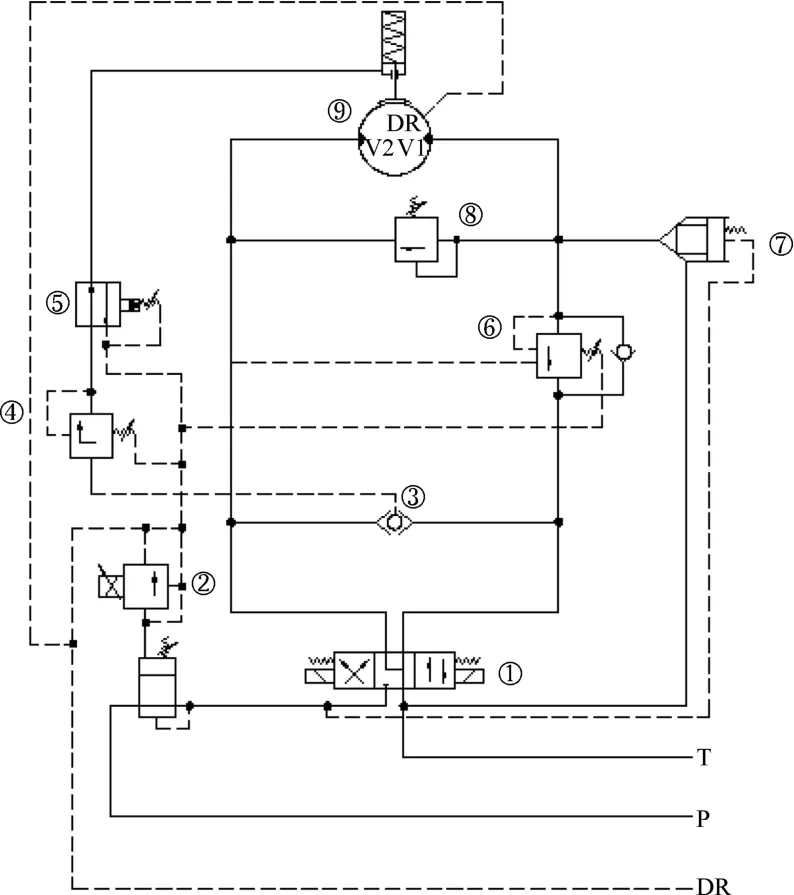
图6 拖曳绞车的液压控制系统
拖曳绞车的收放动作由1个三位四通换向阀控制,绞车的运行速度由液压马达的流量控制。为保护液压马达,在液压马达的主管路上设置1个高压溢流阀。梭阀与三位四通换向阀的进油口和回油口相通,经梭阀流出的液压油通过减压阀和顺序阀,可释放装在拖曳绞车齿轮箱上的制动器,使齿轮箱可按要求工作。
拖曳绞车的恒张力控制可通过先导比例减压阀、高压溢流阀和先导减压阀来实现。由高压溢流阀设定液压系统输出的最大压力,通过遥控液压阀的输出,使拖曳绞车的缆绳保持张紧状态,直到压力到达设定的最大压力。例如:当绞车进行回收作业时,由先导比例减压阀控制缆绳的张紧力,当外部负荷增加到相当于设定的最大系统压力时,缆绳开始放出;当外部负荷减小到设定的最大系统压力以内时,缆绳继续收回。
主绞车的恒张力液压控制系统如图7所示。
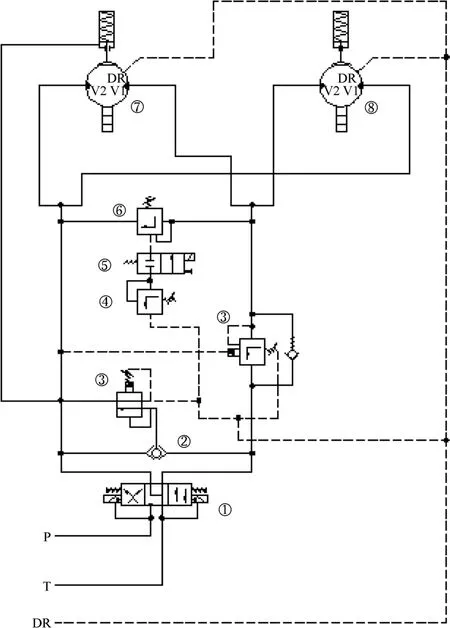
图7 主绞车的液压控制系统
主绞车由2台液压马达驱动,每台液压马达都通过1个行星齿轮箱与绞车卷筒连接,每台齿轮箱都配有1个须使用液压进行释放的弹簧式刹车装置,刹车装置可由梭阀和先导顺序阀控制。
主绞车的恒张力控制须首先将2台液压马达设定为最小流量的排角,以减小管路的压降并提高主绞车的转速。在二位二通阀动作后,液压系统的主压力即由高压溢流阀较低的溢流压力决定,从而提供恒张力所需的高速度和低负荷的液压条件,实现主绞车的恒张力控制。
3 海上应用
自2009年至今,布放回收系统已成功完成近200次“蛟龙”号的布放回收作业。实践证明,拖曳绞车和主绞车的恒张力控制可很好地适应恶劣海况下“蛟龙”号的快速升沉,布放回收系统可实现“蛟龙”号的三级海况布放和四级海况回收的作业要求。门架、伸缩柱、主绞车、锁紧装置和拖曳绞车等的控制开关被集成到1套可移动的遥控面板上,当进行“蛟龙”号的布放回收作业时,操作人员可根据作业需求和合适地点,对布放回收系统各部件的动作进行遥控。
“蛟龙”号载人潜水器海上布放的流程为:①下潜人员经由“蛟龙”号的维护平台进入潜水器,在布放人员关闭潜水器舱盖后,升降轨道车开始移动并移动至A 形架的正下方,由布放人员将主吊缆与潜水器连接后,主吊缆提升,同时A 形架向外摆动;②A形架外摆至母船尾部,由布放人员将拖曳缆绳与潜水器上的笼头缆连接,A 形架继续向外摆动至最大位置,主吊缆缓慢释放,在主吊缆与拖曳缆绳的合力下,潜水器可稳定到达海面;③潜水器到达海面后,蛙人乘坐小艇靠近潜水器并解下主吊缆,使主吊缆与潜水器脱离,此时潜水器可开始下潜。
4 结语
“蛟龙”号载人潜水器的布放回收系统是我国首套用于载人潜水器的布放回收系统,其主要结构部件包括A 形架、拖曳绞车和升降轨道车。拖曳绞车和A 形架主吊缆的恒张力控制可满足“蛟龙”号三级海况布放和四级海况回收的要求,升降轨道车同时可作为“蛟龙”号日常存放、保养和检修的载体。布放回收系统已成功布放回收“蛟龙”号近200次,为我国发展载人深潜事业积累了大量实践经验。
猜你喜欢
安徽冶金科技职业学院学报(2023年1期)2023-08-15 07:32:38
舰船科学技术(2022年10期)2022-06-17 06:25:50
铁道通信信号(2020年10期)2020-12-20 20:45:30
装备制造技术(2020年2期)2020-12-14 03:09:48
金属加工(热加工)(2020年12期)2020-02-06 05:59:18
铁道通信信号(2019年8期)2019-10-10 05:05:54
铁道通信信号(2018年8期)2018-11-10 05:15:48
铁道通信信号(2018年4期)2018-06-06 03:31:36
中国军转民(2017年9期)2017-12-19 12:11:30
中国科技产业(2016年2期)2016-02-09 07:56:35