基于冗余删除的软件定义机载网络控制器部署策略
2020-09-07 00:30:56陈柯帆
空军工程大学学报 2020年4期
潘 武,吕 娜,陈柯帆,刘 创,陈 坤
(1.空军工程大学信息与导航学院,西安,710077; 2.国防科技大学电子对抗学院,合肥, 230000)
机载网络[1]作为链接航空平台的通信基础设施,为航空平台[2]提供业务交互服务,保障作战任务的高效实施。随着日益复杂化的战场环境对作战效能要求的不断提高,受平台载荷、平台机动性、平台隐身性、电磁兼容性等需求限制,令航空平台本身具备充分满足任务需求、灵活适应战场环境的多样化作战能力已变得愈加困难[3]。软件定义网络(Software-Defined Networking,SDN)范式的出现为解决这类问题提供了新的契机。解耦合的控制平面与数据平面,为实现灵活配置多功能的网络控制提供了支撑。SDN作为一种新型的网络范式,目前已被广泛研究并应用于各领域,包括互联网、航空航天、战术网络等[4-7]。
控制器作为SDN的“大脑”,负责网络中的流量控制和业务转发配置。针对控制器部署问题,国内外相关研究已陆续展开,文献[8]针对控制器放置问题(Controller Placement Problem, CPP),提出控制器部署的位置和数量对部署的网络性能有直接影响,描述了不同场景为达到不同的部署需求时,需考虑优化不同的指标,如网络节点间的传输时延、控制器控制的交换机节点数量、链路的可靠性、部署成本开销或流部署开销等。针对控制器部署中的目标优化问题,目前主要研究分为以下2类:
类型1:对单个目标进行优化[9-15],此类研究主要解决对单个功能需求显著的模型,重点优化该指标,而其他指标只需满足正常的要求。但其适用范围限于规模较小的网络,实现的功能种类较少。
类型2:对多个目标进行权衡优化[16-19],该类型研究主要解决规模较大的网络,需要综合多个性能指标,满足多样化的功能需求。
然而,随着网络规模的扩大,网络的任务越来越多样化,需要同时优化多个性能指标,类型2的研究逐渐受到重视。
由于无人机具有灵活、成本低、易于部署等独特优势,考虑利用无人机搭载控制器构成逻辑集中的控制平面,根据不同任务需求灵活配置,对任务编队构成的数据平面进行管理和控制,能够使网络在满足任务需求的同时降低部署成本开销。研究如何在可靠通信的基础上有效减少部署控制器的数量从而降低网络的部署成本开销,对网络的部署具有重要意义。
针对上述优化部署成本开销问题,本文研究SDN架构下的机载网络[3],将优化机载网络可靠性和部署成本开销2个指标抽象为多目标优化问题,设计了一种基于冗余删除的无人机控制器部署策略(UAV Controller Deployment Strategy Based on Redundant Deletion, UAV-CDSRD),将多控制器部署问题转化为初始布设、冗余判定和冗余删除3个阶段。依据任务区域的特点,提出了初步部署算法(Preliminary Deployment Algorithm,PDA);考虑可靠连接和降低网络的部署成本开销的约束条件,提出了基于连接关系的冗余判定算法(Redundancy Decision Algorithm Based on Connection Relationship, RDCR);以可靠性和部署成本开销为优化目标,提出了基于网络连通的冗余删除算法(Redundancy Deletion Algorithm Based on Network Connectivity, RDNC),删除冗余无人机控制器。
1 控制器部署模型
1.1 场景描述
机载网络作战场景中,在战场区域(以下称为任务区域)内分散着多种类型的有人机编队(以下称为任务平台),它们依据多任务需求,灵活变化拓扑结构。为对高动态的机载网络进行有效管控,可以利用无人机搭载控制器(以下称为控制平台)构成逻辑集中的控制平面,实现控制信息的交互与下发,并且有效降低网络部署成本开销。有人机编队构成的数据平面,按照控制信息中的流表指令等相关规则,实现业务信息的可靠交互以完成相应的作战任务。
1.2 问题建模
针对部署场景作以下假设说明:
1)由于平台间的信号通过无线信道传输,本文假设其信息传输的衰落模型符合莱斯分布,噪声设为高斯白噪声,通过发送接收到的信号功率和噪声功率可以计算节点间的信噪比。
2)假设网络模型中任务平台数为M,根据任务平台数量和任务区域大小初步部署控制平台数为N。
3)a=[ai]1×N表示N个控制平台的状态,矩阵中的元素用0和1表示,ai=1表示控制平台i处于活跃状态,ai=0表示被删除;
4)b=[bi,k]N×M表示控制平台i与任务平台k的连接状态,bi,k=1表示控制平台i与任务平台k处于连接状态,否则bi,k=0;
5)c=[ci,j]N×N表示控制平台i与控制平台j间的连接状态,ci,j=1表示控制平台i、j处于能够连通的范围内,否则ci,j=0。
2 基于冗余删除的部署策略设计
将该策略分为3个阶段:首先,依据任务区域的特点,采用初步部署算法PDA得出无人机的初步部署数量和位置;然后,在满足可靠连接和降低成本开销的部署约束下,依据基于连接关系的冗余判定算法RDCR得出冗余无人机;最后,以可靠性和降低部署成本开销为优化目标,利用基于网络连通的冗余删除算法RDNC删除冗余无人机控制器。
策略算法中所用的符号参数如下:
M={1,2,…,M}为任务平台集合;U={1,2,…,N}为控制平台集合;Rc为平台的通信半径;di,j为平台i、j间的距离;Qmax为控制平台的容量阈值;γi,k为平台i与平台k间的信噪比;τ为未被覆盖的任务平台比例;Dopt为控制平台间的最小距离阈值;Ω为控制平台所控制的任务平台集合;θ为任务平台所连接的控制平台集合;Λth为平台间实现可靠通信的信噪比阈值;Gf为未满足部署约束的冗余控制平台集合;Gr为循环迭代前未被删除冗余控制平台集合。
2.1 部署约束及性能评估参数
2.1.1 部署约束
部署约束是指在对无人机控制器进行部署时,控制平台和任务平台需满足的相应约束条件,以优化部署结果的可靠性和部署成本开销指标。
对于机载网络中的覆盖连接可描述为:假设控制平台的通信覆盖半径固定为Rs,每个控制平台的覆盖范围是以控制平台为圆心,半径为Rs的圆,如果任务平台距该控制平台的距离小于半径Rs,则可实现覆盖连接。
为使部署结果能够在满足可靠覆盖的同时降低部署无人机的数量,部署约束如下:
1)约束1:无人机控制器与任务平台间的距离应小于无人机的通信范围,才能实现对任务平台的覆盖连接,并表示如下:
di,j≤Rc,∀i≠j
(1)
2)约束2:考虑复杂战场条件下信道的质量,要求平台间的信噪比γi,k需大于设定的信噪比阈值Λth,并且阈值大小的设定需要衡量场景的实际需求,表示如下:
γi,k≥Λth
(2)
3)约束3:由于无人机控制器的状态分为有效和无效,并且无效的无人机最终要被删除,因此任务平台需要与有效的无人机连接才能接收可靠的控制信息,表示如下:
bi,k≤ai,∀i,k
(3)
4)约束4:无人机控制器所能连接的任务平台数量受限于多方面因素[20];如果所连接的任务平台数量过多,则可能导致信息交互数量剧增而造成损坏的情况,因此每个控制平台服务任务平台的数量应小于控制平台的容量阈值Qmax,并表示如下:
(4)
5)约束5:控制平面的连通是确保控制信息一致性的基础,为增强控制平面的可靠性,设定每个控制平台至少与另外2个控制平台保持一跳连接(双连接关系),并且不能使机载网络的控制平面出现孤立的分区,表示如下:
(5)
6)约束6:任务平台只需与控制平面保持一条连接,通过该条链路接收控制信息。此约束能避免多个控制平台同时控制一个任务平台,减少控制资源的浪费,表示如下:
(6)
2.1.2 部署性能评估参数
在本文中,可靠性指标用部署结果中未被覆盖的任务平台比例进行评定,部署成本开销指标用最终部署无人机控制器的数量进行评定。
1)可靠性。由于在进行部署的过程中,少数任务平台与控制平台会出现暂时的断开,因此设定如果部署过程中未被覆盖的任务平台比例小于阈值τ,则满足可靠性要求,并用式(7)评判部署结果的可靠性性能:
(7)
2)部署成本开销。本文采用部署控制平台数量评判网络的部署成本开销指标,即部署结果中处于活跃状态的控制平台数量,用式(8)表示:
(8)
2.2 初步部署算法PDA
根据任务平台的分布特征,可以得出初步的部署结果以及各平台的连接关系,算法1描述如下:
输入:任务平台分布特征
输出:矩阵a、b、c,集合Ω、θ
1)根据任务平台的分布特征放置控制平台
2)初始化各平台的状态及相应的参数符号值
3)Ωi=0,ai=1,∀i∈U
4)θk=0,∀k∈M,Gr=U,Gf=∅
5)for∀i∈Uand ∀j∈Udo
6)计算控制平台i与控制平台j间的距离di,j
7)ifdi,j≤Rc
8)ci,j=1
9) elseci,j=0
10) end if
11)end for
12)for ∀i∈U and ∀k∈Mdo
13) 计算控制平台i与任务平台k间的γi,k
14) ifγi,k≥Λth
15)bi,k=1,Ωi=Ωi+1,θk=θk+1
16) elsebi,k=0
17) end if
18)end for
算法第1~4行表示根据任务平台的分布特征,在任务子区域的中心初步部署控制平台,初始化最初部署的所有控制平台均为有效状态,各任务平台所连接的控制平台数为0,循环迭代前未被删除的冗余控制平台集合Gf为空集。
第5~10行通过计算控制平台间的距离,根据约束1中的相邻控制平台间的距离应在其通信范围内,得出矩阵c=[ci,j]N×N。
第11~17行表示控制平台与任务平台间的信噪比γi,k并与阈值Λth对比,根据约束6中使任务平台连接的控制平台数量最少,可以得出矩阵b=[bi,k]N×M,并且可以得出控制平台所控制的任务平台集合Ω和任务平台所连接的控制平台集合θ。
2.3 基于连接关系的冗余判定算法RDCR
针对约束2中的平台间信噪比γi,k须大于阈值Λth、约束3中的任务平台须与有效控制平台连接、约束4中的控制平台连接数须小于容量阈值Qmax,对2.2节得出的控制平台所控制的任务平台集合Ω、任务平台所连接的控制平台集合θ进行分析;对于θ>1的任务平台则认为其存在冗余连接,设计冗余判定算法得出冗余控制平台,算法2如下:
输入:集合Ω、θ
输出:冗余控制平台(矩阵a)
1)while(θ>1)do
2) 找出Ω值最大的控制平台并标记为μ
3) 找到所有与控制平台μ相连的任务平台,并用集合A表示
4) 记录A中所有任务平台的θ值,并用集合B表示
5) while(A中包含的任务平台个数大于Qmax)do
6) 寻找与控制平台μ相连中
θ值最大的任务平台并删除
7) 更新A和B
8) end while
9) 删除A中任务平台与其他控制平台的连接
只保留其与控制平台μ的连接
10) 更新b=[bi,k]N×M,Ω和θ
11)end while
12)依据b=[bi,k]N×M得出a=[ai]1×N
算法第1~4行表示首先找出Ω值最大的控制平台并标记为μ,将其与容量阈值Qmax比较。
第5~8行表示如果Ωμ大于Qmax,则说明控制平台μ所控制的任务平台数超出了容量阈值Qmax,需要删除其中部分连接。本文考虑删除与控制平台μ相连中θ值最大的任务平台(认为θ值越大的任务平台,与其他控制平台相连的选择更多),循环删除直到Ωμ小于Qmax。
第9行表示针对Ωμ小于Qmax,对控制平台μ连接的任务平台作如下处理:只保留其与控制平台μ的连接,删除其与其他控制平台的连接,这将使任务平台只与1个控制平台连接,控制器资源得到充分利用。
第10~12行表示在删除过程中及时更新矩阵b=[bi,k]N×M、c=[ci,j]N×N、Ω、θ,直到所有平台均满足约束2、3、4,得出初步部署中存在的冗余控制平台。
2.4 基于网络连通的冗余删除算法RDNC
针对约束5中网络模型中的控制平台应满足双连接关系、不能出现孤立的网络分区情况,对得出的冗余控制平台进行循环验证,设计基于网络连通的冗余删除算法,得出部署结果。算法3如下:
输入:控制平台数N,控制平台i,矩阵c、a
输出:条件变量z
1)初始化:z=1
2)根据c和a得出控制平台i与
其他控制平台的所有连接集合Γ
3)for ∀p∈Γdo
4) 根据矩阵c,在Γ中寻找出除p之外的连接
5) if存在除p之外的连接
6) 遍历Γ,重复此过程
7) else
8)z=0 and break
9) end if
10)end for
11)if冗余控制平台q满足双连接关系
12) 令控制平台q的发射功率为零
13)aq=0,ci,q=cq,i=0
14) if网络出现孤立分区
15)aq=1
16) else if其他冗余控制平台能被删除
17) 删除控制平台q
18) 更新未被删除冗余控制平台集合Gr
19) else
20)aq=1
21) end if
22) end if
23) if未覆盖率大于τ
24)aq=1
25) elseaq=0
26) end if
27)end if
算法第1~10行表示对于经过上述两阶段得出的a=[ai]1×N和c=[ci,j]N×N,针对约束5中的双连接关系约束,对每个控制平台进行遍历搜索,确定可以被删除的控制平台。
第11~15行表示对于满足约束5中双连接关系约束的平台,对约束5中不能出现孤立分区约束进行验证。
第16~22行表示对于出现网络孤立分区的情况,考虑删除顺序对最终删除结果的影响,循环验证能被删除的控制平台,使得最终未满足部署约束的冗余控制平台集合Gr=∅。
第23~27行表示对删除过程中未被覆盖的任务平台比例进行判定,如果一个冗余控制平台被删除后,导致未被覆盖的任务平台比例超过阈值τ,则将其保留不予删除。
为了更好地解释删除过程,对照图1进行说明。假设依据a=[ai]1×N得出控制平台1、2、3、4、5均为冗余控制平台,其余均为有效控制平台。对于实际删除过程中可能出现的情况,说明如下:
情况1:如果控制平台4或6被删除,将导致控制平台5或7只能与一个控制平台保持一跳连接,不满足约束5中的双连接关系约束;
情况2:如果控制平台3被删除,将导致网络部署出现孤立的网络分区,不满足约束5中避免出现孤立分区约束;
情况3:对于相连接的冗余控制平台,则存在删除顺序的影响。如果考虑先删除控制平台2,则将导致控制平台1只能与一个控制平台保持一跳连接,不满足约束5中的双连接关系约束,导致无法删除;然而如果考虑先删除控制平台1,则控制平台2也可以被顺利删除。

图1 删除冗余控制平台的举例说明
3 仿真结果与分析
基于1.1节中的场景描述,将本文策略与基于全域覆盖的控制器部署策略CDSGC进行仿真对比分析。由于平台间的信噪比与平台间实际接收的功率和噪声功率有关。为简化研究,本文认为如果任务平台与在控制平台的通信范围内,则认为两平台间的信噪比大于阈值Λth,即能够保证正常的可靠通信。仿真参数见表1。

表1 仿真参数
3.1 初步部署
首先在1 000 km×1 000 km的任务区域中,随机部署200个任务平台(图2~4),根据任务平台的主要分布特征,结合无人机控制平台的通信半径,在任务子区域的中心(即小正方形区域的中心)初步部署16个控制平台,以实现对任务平台的全面覆盖连接。
图2表示将机载网络中执行任务的多个编队类比为随机产生的200个点,即为任务平台构成数据平面。图3表示根据任务区域的大小和任务平台的分布特征,考虑在任务区域中的任务子区域中心(即小正方形区域的中心)初步部署无人机。图4表示各控制平台连接各自子区域内的任务平台,形成初步的网络连接部署关系。

图2 随机分布的任务平台

图3 初步部署控制平台

图4 初步连接部署图
3.2 判定冗余控制平台
对于初步部署的控制平台,通过2.3节中的基于连接关系的冗余判定算法RDCR进行求解,可以判定得出网络中存在的冗余控制平台。
根据UAV-CDSRD的思想,逐步求解并判定初步部署中的冗余控制平台,迭代判定过程如图5所示。
1)首先依据控制平台与任务平台间的距离和平台的通信范围确定平台间的连接关系,得出控制平台i与任务平台k的连接状态关系矩阵b=[bi,k]N×M和控制平台i与控制平台j间的连接状态关系矩阵c=[ci,j]N×N;
2)然后考虑使有效控制平台所控制的任务平台集合Ω达到最大,且不超过设定的控制器容量阈值Qmax,此做法目的是使控制器的资源利用率达到最大以尽可能减少部署控制器的数量;
3)对于任务平台所连接的控制平台集合θ,考虑每个任务平台至多只能被一个控制平台连接,使控制器资源利用率尽可能达到最大,以减少最终部署的控制平台数量;
经过上述步骤依次得出了冗余控制平台6、7、9、15。
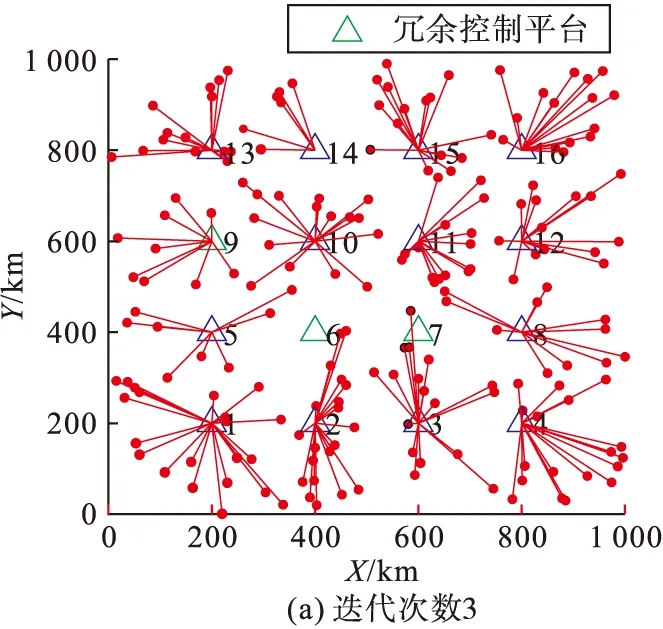

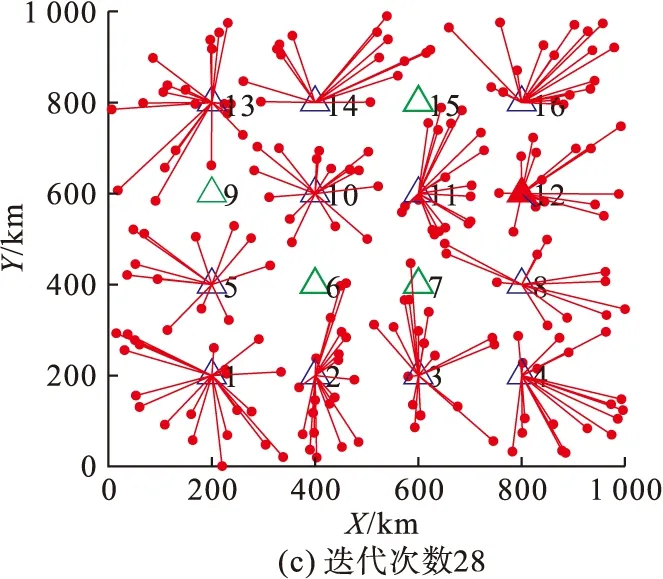
图5 判定冗余控制平台过程示意图
3.3 删除冗余控制平台
对于3.2中的冗余控制平台,有些能够进行简单的删除(图6),而有些则需要考虑2.4节描述中可能出现的情况进行循环验证删除。
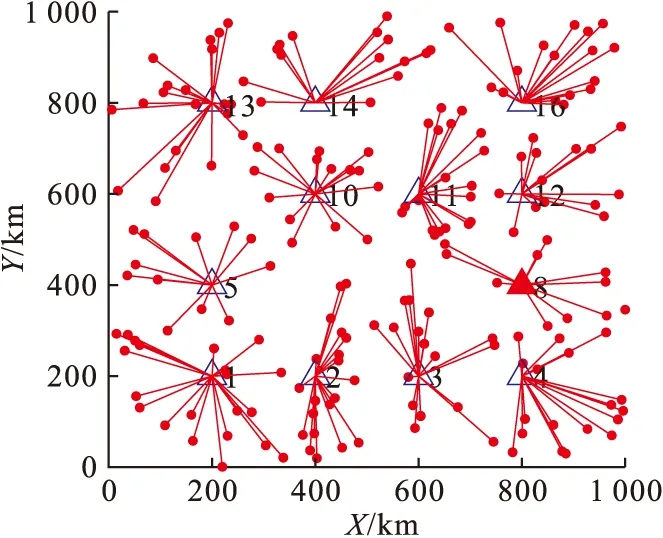
图6 删除冗余控制平台部署图
图6表示依据基于网络连通的冗余删除算法RDNC,循环验证部署结果是否满足部署约束,得出删除结果。对于上述判断得出的冗余控制平台,需要考虑删除过程中可能出现的3种情况(邻居控制该平台数、出现通信孤立分区、删除顺序的影响),并通过循环验证判断其是否能够删除,直到满足算法3中的Gr=∅。可以看出,对于经过上述过程判定得出的冗余控制平台,将其全部删除后,不会出现网络孤立分区的连接,并且能被顺利删除。
3.4 策略对比分析
由于目前针对此类问题的相关部署策略和算法研究较少,很难进行多个策略的对比分析。因此,为说明本文策略的有效性及实用性,将本文策略得出的部署结果与基于全域覆盖的控制器部署策略CDSGC得出的部署结果进行对比见图7。


图7 不同策略得出的网络部署结果对比图
图7(a)表示通过本文UAV-CDSRD得出的部署结果;图7(b)表示通过CDSGC得出的部署结果。CDSGC根据任务区域的特征以及控制平台的通信半径,考虑控制平面的可靠连接和控制容量等因素,在合适位置部署一定数量的控制平台,实现对所有任务平台可靠覆盖连接,优化机载网络的可靠性性能(图8)。
图8为针对1.1节中的场景,2种策略在部署过程中,任务平台的覆盖率对比和最终部署无人机数量对比图。对比图反应了2种策略的部署可靠性和部署成本开销性能指标的关系,通过对比可以看出:CDSGC能够实现对任务平台全面可靠连接,但未能使控制器的资源利用率尽可能最大以降低部署成本开销。本文的UAV-CDSRD,虽然在迭代过程中造成对少数任务平台的暂时断开,但均未超出阈值,满足可靠性指标;并且其控制器的资源利用率有较大的提升,使部署的无人机控制器数量减少了25%,有效降低了部署成本开销。因此,本文所提策略更能降低高动态机载网络的部署成本,有效提升作战性能。
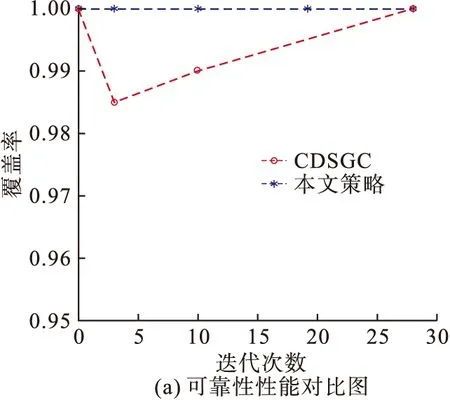
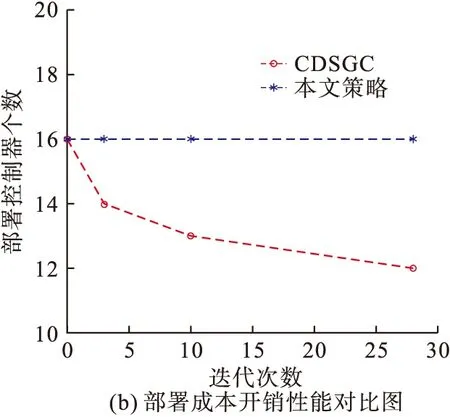
图8 2种策略的部署性能对比图
4 结语
本文将灵活易部署的无人机引入机载网络的控制器部署问题,使其搭载控制器构成逻辑集中的控制平面,对有人机编队进行可靠管控;综合衡量可靠性和部署成本开销指标,将其抽象为多目标优化问题,提出了一种基于冗余删除的无人机控制器部署策略。通过设计的初步部署算法PDA、基于连接关系的冗余判定算法RDCR和基于网络连通的冗余删除算法RDNC,对初始布设的控制平台进行冗余删除,从而减少部署无人机控制器的数量。仿真结果证明了冗余删除策略的有效性和实用性。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30 06:25:14
今日农业(2021年7期)2021-07-28 07:07:16
加油站服务指南(2021年4期)2021-07-21 02:29:22
非公有制企业党建(2020年5期)2020-06-16 08:46:00
数学年刊A辑(中文版)(2020年1期)2020-05-19 00:30:30
制造技术与机床(2019年9期)2019-09-10 07:36:54
西南交通大学学报(2018年6期)2018-12-18 02:22:28
河北遥感(2017年2期)2017-08-07 14:49:00
太空探索(2016年9期)2016-07-12 10:00:02
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27