波浪滑翔器水下牵引机抗扰动性能研究
2020-09-07 11:57:56桑宏强关海鹏孙秀军
水下无人系统学报 2020年4期
桑宏强, 关海鹏*, 孙秀军
波浪滑翔器水下牵引机抗扰动性能研究
桑宏强1, 关海鹏1*, 孙秀军2, 3, 4
(1. 天津工业大学 机械工程学院, 天津, 300387;2. 河北工业大学 机械工程学院, 天津, 300130; 3. 中国海洋大学 物理海洋教育部重点实验室, 山东 青岛, 266100; 4. 青岛海洋科学与技术试点国家实验室 海洋动力过程与气候功能实验室, 山东 青岛, 266237)
针对波浪滑翔器因自身的弱机动性原因而导致的在受到洋流干扰时无法良好保持其原有航向的缺点, 以及单纯采用控制系统来提高其抗流干扰性能, 带来的因系统频繁操舵导致的平台功耗增加以及操纵系统磨损的不足, 文中以“海哨兵”波浪滑翔器为研究对象, 从结构层面通过计算流体力学(CFD)技术分析不同牵引机展弦比、翼间距、翼板展弦比和不同洋流方向下的水下牵引机在洋流干扰下的航行轨迹, 来进一步分析水下牵引机抗流干扰的结构特点, 得到了水下牵引机相关结构参数与抗扰动性能之间的关系。文中的研究可为水下牵引机结构优化设计提供依据及参考。
波浪滑翔器; 水下牵引机; 抗扰动性能; 计算流体力学; 洋流干扰
0 引言
2010年, 美国Liquid Robotics公司首先推出可应用于科学研究与考察活动的波浪滑翔器[1-2]。此后, 因与传统的水面无人船相比, 波浪滑翔器克服了使用油或电池作为动力源而带来的续航时间短、易造成环境污染、经济性差等缺点[3-4], 而引发了各国的研究热潮[5-14]。其中, Elhadad等[5-6]利用Fluent作为数值求解软件, 仿真计算了傅汝德数在0.1~0.4之间2种船型的阻力, 预报了波浪滑翔器的船舶阻力, 经与水池实验对比具有良好的一致性; 贾丽娟[7]利用Fluent软件分析了常稳态条件下水翼的翼型、翼间距和摆幅角对波浪滑翔器水动力性能影响; 桑宏强等[8]对波浪滑翔器的纵向速度与波浪参数之间的关系进行了定量分析, 对提升波浪滑翔器动力性能具有重要意义; Kraus等[9-10]以wave glider SV2为对象建立了操纵性的数学模型, 在无海流干扰的条件下对其进行仿真分析实验, 仿真出波浪滑翔器能够在半径40 m的设定点圆域内进行位置保持; Wang等[11]考虑了脐带缆变化的影响, 建立了波浪滑翔器的动力学模型并通过仿真验证了其模型的合理性; Wang等[12]使用牛顿欧拉方法建立了波浪滑翔器四自由度的数学模型, 该模型考虑了水平面内的2阶波漂移力和垂直面的1阶波浪力, 并考虑到缆绳的弾性变形, 通过一些运动仿真验证了模型的有效性。
当前针对波浪滑翔器抗扰动性能的研究, 主要从控制算法方面来改善其航行过程中因各类干扰的存在, 及自身弱机动性的特征而引起的航行轨迹较差的现象。Liao等[13-14]考虑到海洋环境中扰动的影响, 设计了一款波浪滑翔器智能控制系统, 针对海洋环境特别是洋流扰动引起的路径跟随任务稳态误差, 提出了一种自适应比例-积分-微分(proportion-integral-derivative, PID)控制方法, 同时针对实验中舵零漂的问题, 提出了一种基于舵角补偿改进的S(Sigmoid)面控制方法, 该方法可以补偿环境干扰以及安装误差的影响, 海试验证了其有效性; Wang 等[15]基于人工鱼群算法进行艏向S面控制器的参数优化, 提高了在海洋环境干扰下波浪滑翔器的艏向控制性能。
然而, 已有研究对于从结构层面对波浪滑翔器抗扰动性能的研究却少有提及。水下牵引机作为波浪滑翔器的驱动装置, 其在洋流干扰下运动性能的优劣对于波浪滑翔器能否有效实现路径跟踪有着极为重要的意义。文中以波浪滑翔器的驱动装置水下牵引机为研究对象, 通过计算流体力学(computational fluid dynamics, CFD)技术, 对牵引机洋流干扰下的运动状态进行分析, 对比分析不同结构参数的牵引机的航行轨迹, 为波浪滑翔器水下牵引机结构优化提供设计依据。
1 波浪滑翔器概述
波浪滑翔器由随波浪起伏的水面浮体船、在水下运动的牵引机以及连接水面浮体船与水下牵引机的脐带缆组成。水面浮体船由浮力材料组成; 脐带缆由聚氨酯材料制作而成; 水下牵引机的翼板由截面形状为NACA0012的碳纤维材料制作而成, 如图1所示。
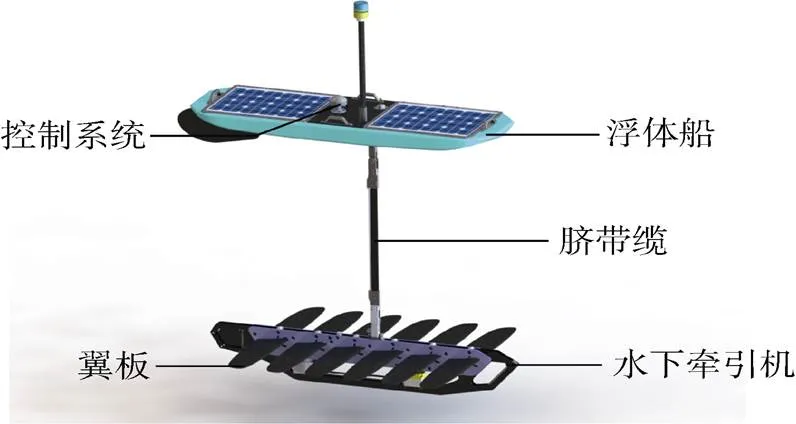
图1 “海哨兵”波浪滑翔器
波浪滑翔器的工作原理为: 水面浮体船随着波浪的起伏运动而带动整个平台上下运动, 平台的运动促使水下牵引机上的翼板沿着旋转轴旋转, 翼板旋转过程中产生的前向力, 带动牵引机向前运动, 从而通过脐带缆带动整个平台向前运动。波浪滑翔器最大的优点就是不论海浪朝向如何, 水下牵引机的翼板均能分解出前向的力, 从而使整个平台时刻拥有前向运动的驱动力。文中以“海哨兵”波浪滑翔器为研究对象, 具体参数见表1。
根据海试所观察的轨迹图(如图2)可以看出, 当前波浪滑翔器由于具有弱机动性的特点, 使得其在航行过程中受洋流干扰的状况十分明显, 因此为了提升其抗干扰能力, 使其在航行过程中能稳定航行, 文中将对其在洋流干扰下的航行状态进行仿真分析, 通过Fluent软件, 分析不同结构参数的牵引机在洋流干扰下的航行轨迹, 进而得出水下牵引机抗洋流干扰的结构特点, 为波浪滑翔器牵引机的结构优化提供设计参考。
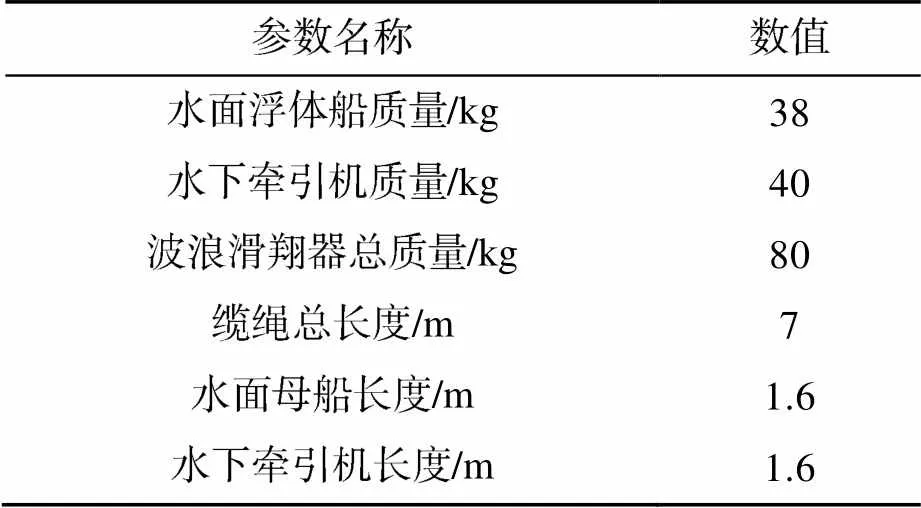
表1 波浪滑翔器几何参数

图2 波浪滑翔器海试时航行轨迹
2 仿真模型建立与验证
2.1 仿真模型建立
文中仿真以“海哨兵”波浪滑翔器为原型进行简化, 牵引机长度为1.6 m, 高度为0.29 m, 翼板采用的截面为NACA0012外形, 弦长为0.16 m, 展长0.5 m, 相邻水翼间距为0.04 m, 其简化的牵引机模型如图3所示。
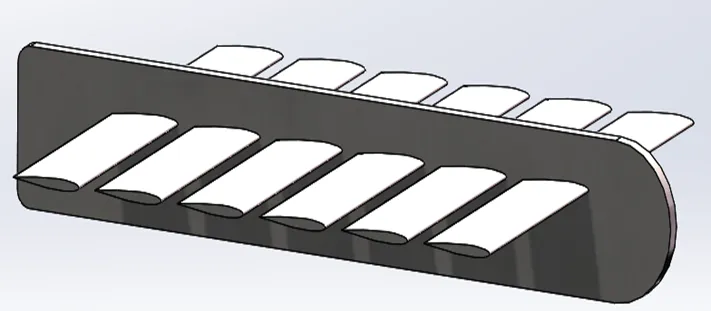
图3 数值计算简化模型
计算域为1个长方体, 大小为12 m×7 m×6 m,左侧边界距牵引机4 m, 右侧边界距牵引机6.4m。牵引机表面设置为壁面边界条件, 牵引机左侧设置为速度入口的边界条件, 右侧设置为压力出口边界条件, 以此来模拟洋流干扰下的运动状态。图4为东南沿海地区的洋流速度分布图, 设本次速度入口速度为0.2m/s,表示洋流数量。为了模拟水下无限大的海域, 将计算域的其他边界设为对称边界, 如图5所示。
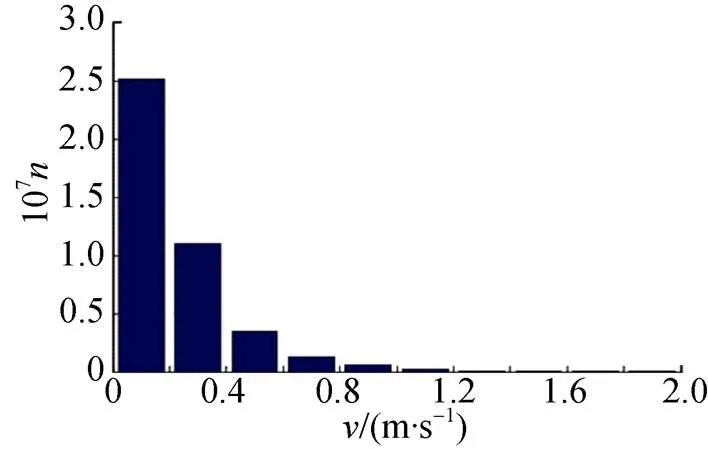
图4 洋流速度大小分布图
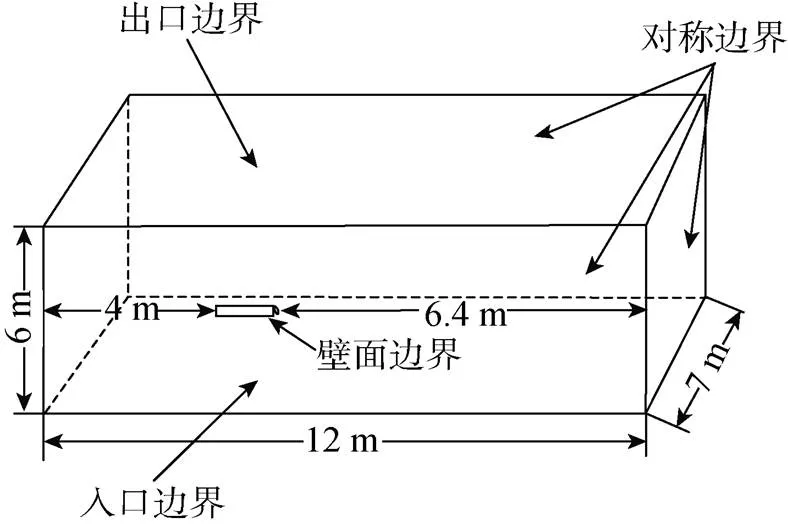
图5 牵引机数值仿真计算域尺寸和边界条件

采用非结构网格进行网格划分, 划分出的网格如图6所示, 网格数量为347万。
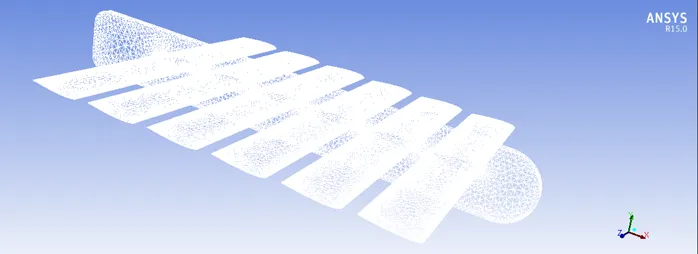
图6 牵引机网格模型
文中将从牵引机的展弦比、翼板间距、翼板展弦比的结构参数以及不同洋流方向4个方面来对牵引机在洋流干扰下的运动轨迹进行分析。
2.2 网格无关性验证
为了对仿真结果的有效性进行验证, 文中对网格无关性进行了仿真, 模拟了3种不同网格数下牵引机在洋流干扰下的偏移轨迹, 图7中给出了网格无关性验证的仿真结果。
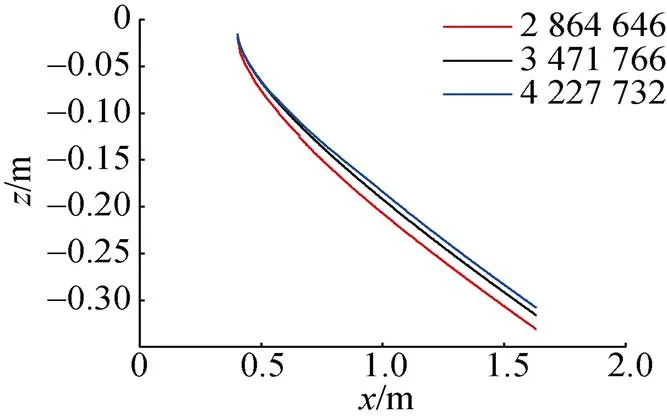
图7 不同网格数量下牵引机航行轨迹
由图中可以看出, 3种不同网格数下牵引机受到洋流干扰时偏移的轨迹基本一致, 网格尺寸422万与网格尺寸347万偏移轨迹的差距要比网格尺寸286万的小, 为了平衡计算精度以及计算机资源的使用, 文中仿真选择网格数为中等网格的347万。
3 仿真结果与分析
3.1 展弦比对牵引机航行轨迹的影响
将牵引机的展弦比定义为
牵引机在不同展弦比下受到洋流干扰情况的航行轨迹如图8所示。
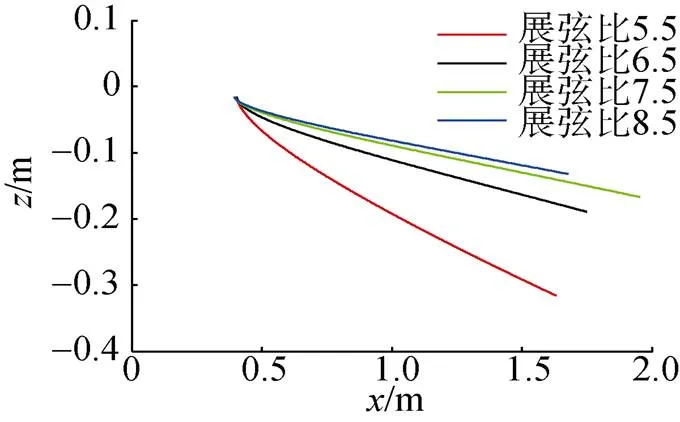
图8 不同展弦比下牵引机航行轨迹
图9为“海哨兵”波浪滑翔器牵引机相同结构参数在有流干扰时的速度云图。从图中可以看出, 牵引机的速度在0.35~0.7 m/s之间, 这与海试时波浪滑翔器的速度基本一致, 保证了仿真的可行性。从图8可知, 随牵引机展弦比的增大, 牵引机抗干扰的能力增强, 其直航过程中偏移的距离变小, 当牵引机展弦比从7.5增大至8.5之后, 其抗干扰的能力基本一致。
图10显示了水下牵引机在航行过程中横滚力矩的变化情况。可以看出, 牵引机展弦比不同时, 其横滚力矩变化幅度基本保持一致, 说明牵引机展弦比在一定范围内的变化对其航行过程中横滚的姿态影响不大。
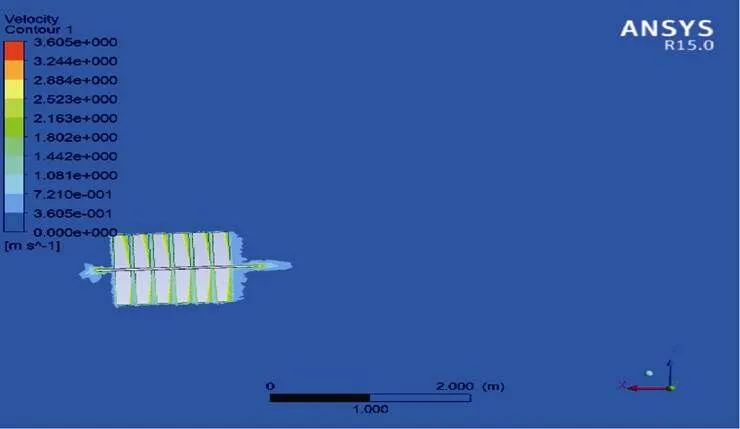
图9 洋流干扰时牵引机速度云图
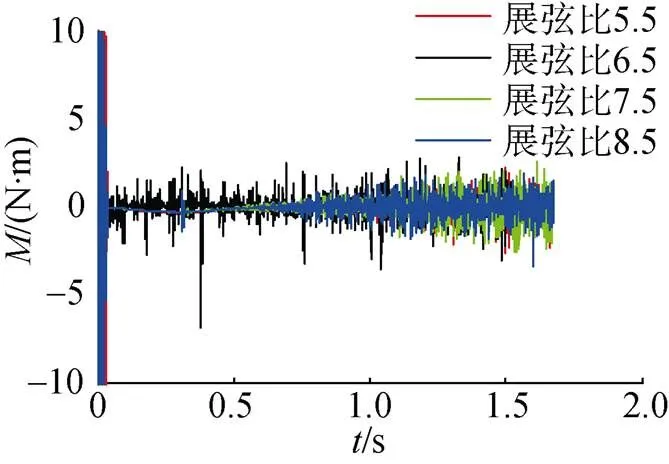
图10 不同展弦比下牵引机横滚力矩变化曲线
图11~图12为牵引机在无干扰及有干扰时,航行过程中的阻力变化图及压力变化云图。由图可知, 有、无洋流干扰时, 牵引机上下表面压差与航行阻力均基本一致, 说明洋流干扰对牵引机航行过程中的阻力影响不大, 影响其航行阻力的因素与其上下表面压差相关。
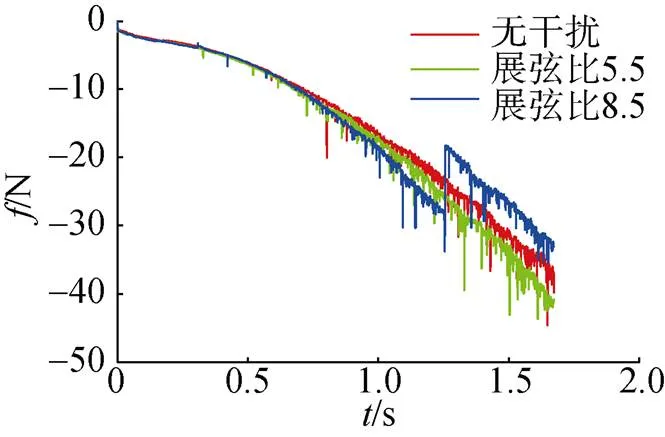
图11 不同展弦比下牵引机阻力变化曲线
3.2 翼板展弦比对牵引机航行轨迹的影响
图13为不同翼板展弦比时航行轨迹变化图。从图中可看出, 展弦比3.125与展弦比3.5受干扰时偏移的轨迹近似; 而展弦比4偏移了较小的距离, 说明增大翼板的展弦比会在一定程度上增强牵引机抗扰动的能力。图14为不同翼板展弦比时的横滚力矩变化曲线, 可以看出, 3种情况下横滚力矩基本一致, 说明其在航行过程中左右晃动的姿态也基本一致。
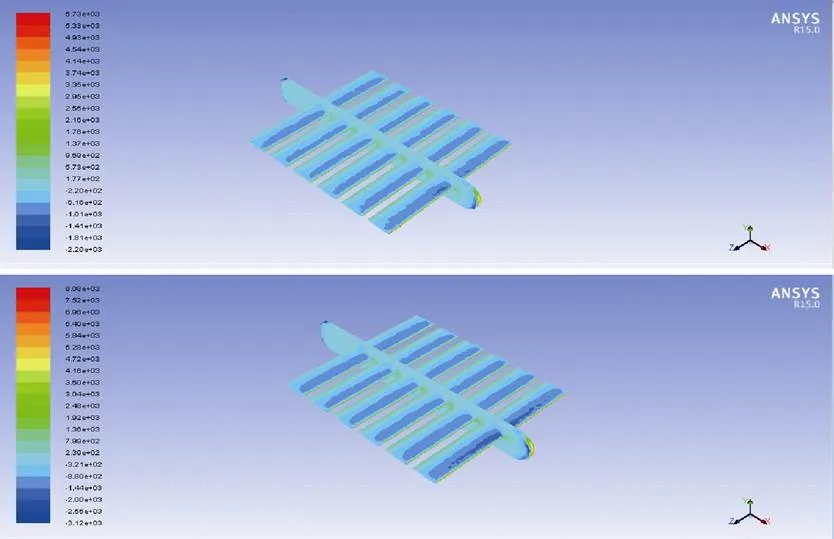
图12 牵引机压力云图
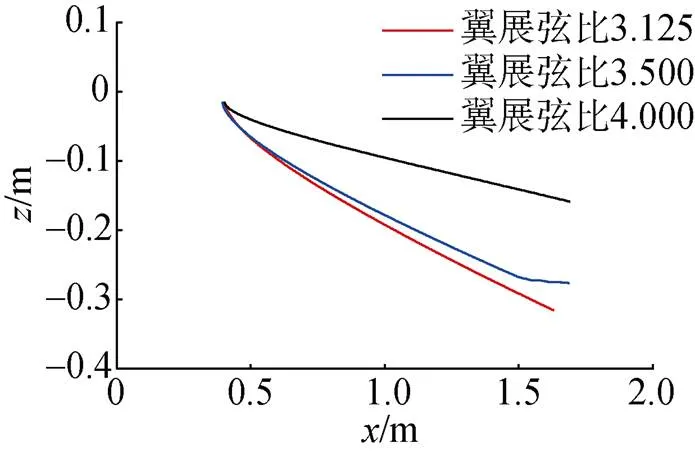
图13 不同翼板展弦比下牵引机航行轨迹
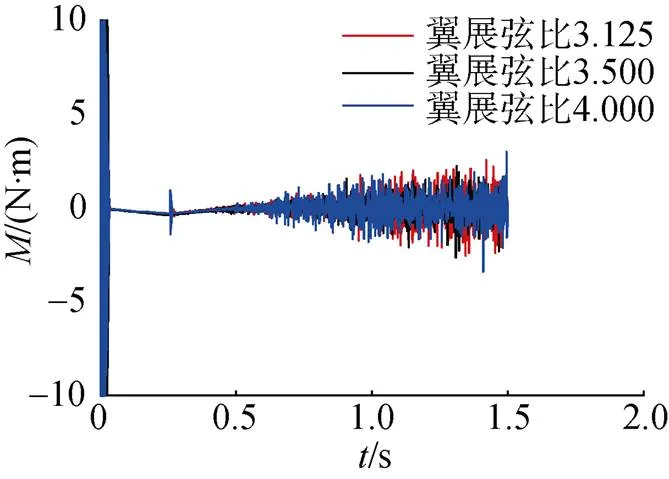
图14 不同翼板展弦比下牵引机横滚力矩变化曲线
3.3 翼板间距对牵引机航行轨迹的影响
图15为不同翼板间距时的航行轨迹, 可以看出, 翼间距40 mm与60 mm受到干扰发生的偏移比翼间距50 mm的要大, 翼间距50 mm时的牵引机表现出了一定的抗流干扰能力。从图16中可知, 翼间距40 mm与翼间距50 mm的横滚力矩基本一致, 翼间距50 mm的横滚力矩波动更小, 而翼间距60 mm时其横滚力矩波动剧烈, 这将导致牵引机在航行时更加不稳定。
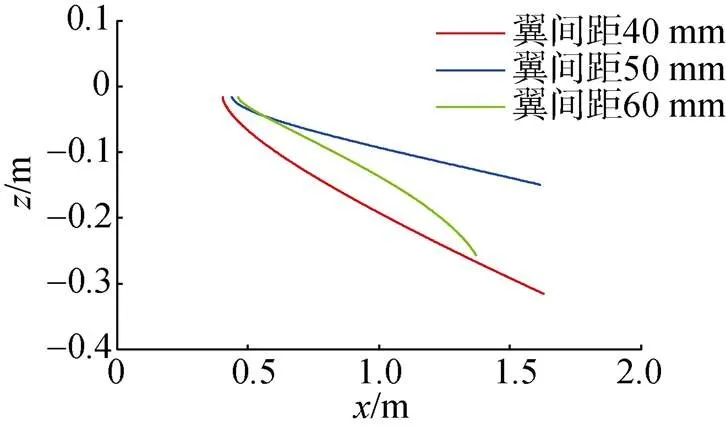
图15 不同翼板间距下牵引机航行轨迹
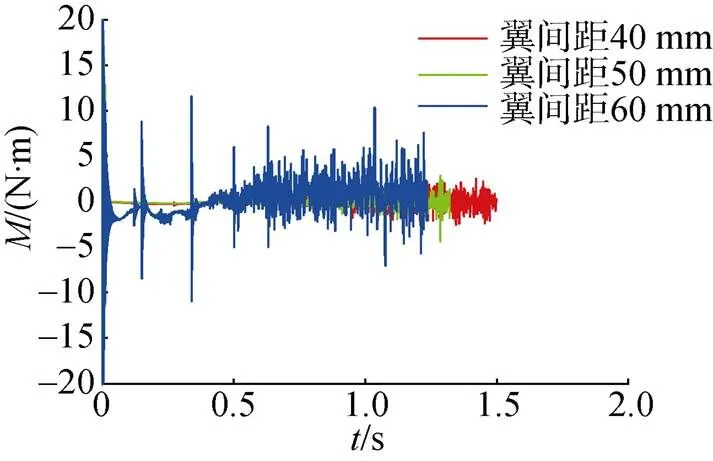
图16 不同翼板间距下牵引机横滚力矩变化曲线
3.4 不同洋流方向对牵引机航行轨迹的影响
海洋水面以下的洋流方向各不相同, 同时牵引机在航行过程中的方向也会随时变化, 为了研究洋流方向对于牵引机航行轨迹的影响, 对于不同洋流方向下牵引机航行过程进行了仿真, 在仿真中设置洋流入口方向与牵引机速度方向夹角为30°、60°、90°下的航行轨迹并进行对比分析, 如图17所示。图中, 在一段航行时间后, 牵引机偏移的轨迹在90°时达到了0.3 m左右, 而此时侧向流30°与60°时分别偏移了0.07 m和0.13 m左右。
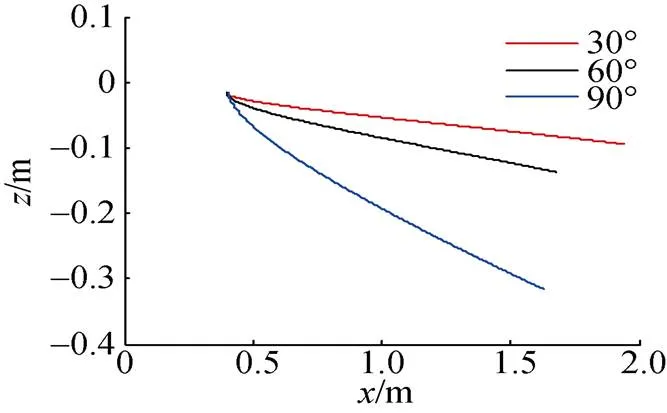
图17 不同洋流方向下牵引机航行轨迹
图18为不同洋流方向下牵引机横滚力矩变化曲线。从图中可以看出, 牵引机在30°侧向流下受到的横滚力矩较小且幅度很小, 说明其姿态保持较好; 而60°的横滚力矩较大, 波动也很剧烈。综上可知, 牵引机在航行时应尽量控制其速度方向与洋流方向的夹角在30°以内, 从而避免引起横滚角过大以及偏航的现象。
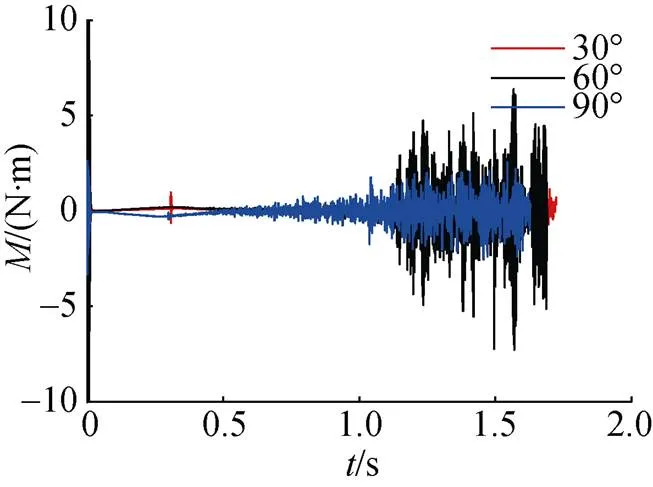
图18 不同洋流方向下牵引机横滚力矩变化曲线
4 结论
根据文中的研究, 可以得出以下结论:
1) 当前波浪滑翔器结构参数下的水下牵引机的抗洋流干扰能力较弱, 在洋流干扰情况下会发生较大偏移, 这种结构会使得牵引机需通过频繁打舵来保持航向, 并带来舵机的功率增加以及操纵装置的磨损;
2) 增大牵引机的展弦比对其在航行过程中抗洋流干扰的能力有一定提升, 但当提升到一定程度之后, 提升效果便不会再有大幅改变;
3) 增大翼板的展弦比会有效提升牵引机航行过程中的稳定直航及抗洋流干扰的能力, 但受牵引机总体尺寸参数的限制, 在增加翼板展弦比时要保证整体结构参数的协调性以进行合理的优化;
4) 当翼板间距从40 mm增大到60 mm时, 其抗洋流干扰能力减弱, 因此在设计牵引机时, 尽量将翼板间距设定在40~60 mm, 以此来保证牵引机航行过程中抵抗洋流干扰的能力;
5) 牵引机在航行时尽量将速度方向与洋流方向夹角控制在30°以内航行, 以保证其姿态以及抗洋流干扰的性能。
从工程应用的角度, 文中结论可为波浪滑翔器牵引机的结构优化提供设计参考, 但由于海洋中洋流变化的多样性, 对于不同洋流干扰下的状况并未做出分析。未来将继续对不同洋流干扰下牵引机结构参数对其航行轨迹的影响进行研究。
[1] Daniel T, Manley J, Trenaman N. The Wave Glider: Enabling a New Approach to Persistent Ocean Observation and Research[J]. Ocean Dynamics, 2011, 61(10): 1509-1520.
[2] Manley J, Willcox S. The Wave Glider: A Persistent Platfo- rm for Ocean Science[C]//Proceedings of Oceans 2010 MTS/ IEEE Sydney Conference. Sydney, Australia: IEEE, 2010.
[3] Hine R, Willcox S, Hine G, et al. The Wave Glider: A Wave- Powered Autonomous Marine Vehicle[C]//Proceedings of MTS/IEEE Biloxi-Marine Technology for Our Future: Global and Local Challenges. Biloxi, USA: IEEE, 2009.
[4] Manley J, Willcox S. The Wave Glider: A New Concept for Deploying Ocean Instrumentation[J]. IEEE Instrumentation & Measurement Magazine, 2010, 13(6): 8-13.
[5] Elhadad A, Wenyang D, Rui D. A Computational Fluid Dynamics Method for Resistance Prediction of the Floating Hull of Wave Glider[J]. Advanced Materials Research, 2014, 936: 2114-2119.
[6] Elhadad A, Duan W, Deng R. Comparative Investigation of an Automated Oceanic Wave Surface Glider Robot Influence on Resistance Prediction Using CFD Method[J]. App- lied Mechanics and Materials, 2015, 710: 91-97.
[7] 贾立娟. 波浪动力滑翔机双体结构工作机理与动力学行为研究[D]. 天津: 国家海洋技术中心, 2014.
[8] 桑宏强, 李灿, 孙秀军. 波浪滑翔器纵向速度与波浪参数定量分析[J]. 水下无人系统学报, 2018, 26(1): 16-22.Sang Hong-qiang, Li Can, Sun Xiu-jun. Quantitative Analysis on Longitudinal Velocity and Wave Parameter of Wave Glider[J]. Journal of Unmanned Undersea Systems, 2018, 26(1): 16-22.
[9] Kraus N D. Wave Glider Dynamic Modeling, Parameter Identification and Simulation[D]. Honolulu: University of Hawaii, 2012: 27-74.
[10] Kraus N D, Bingham B. Estimation of Wave Glider Dyna- mics for Precise Positioning[C]//Proceedings of Oceans 2011 MTS/ IEEE Kona Conference. Kona, USA: IEEE, 2011.
[11] Wang L F, Li Y, Liao Y L, et al. Dynamics Modeling of an Unmanned Wave Glider with Flexible Umbilical[J]. Ocean Engineering, 2019, 180: 267-278.
[12] Wang P, Tian X L, Lu W Y, et al. Dynamic Modeling and Simulations of the Wave Glider[J]. Applied Mathematical Modelling, 2019, 66: 77-96.
[13] Liao Y L, Wang L F, Li Y M, et al. The Intelligent Control System and Experiments for an Unmanned Wave Glider[J]. Plos One, 2016, 11(12): e0168792.
[14] Liao Y L, Li Y M, Wang L F, et al. Heading Control Method and Experiments for an Unmanned Wave Glider[J]. Journal of Central South University, 2017, 24(11): 2504-2512.
[15] Wang L F, Liao Y L, Li Y M, et al. Unmanned Wave Glider Heading Model Identification and Control by Artificial Fish Swarm Algorithm[J]. Journal of Central South University, 2018, 25(9): 2131-2142.
Research on Anti-Disturbance Performance of the Underwater Tractor for Wave Glider
SANG Hong-qiang1, GUAN Hai-peng1*, SUN Xiu-jun2, 3, 4
(1.School of Mechanical Engineering, Tianjin Polytechnic University, Tianjin 300387, China; 2. School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130, China; 3. Physical Oceanography Laboratory, Ocean University of China, Qingdao 266100, China; 4. Laboratory of Marine Dynamics and Climate Function, Pilot National Laboratory for Marine Science and Technology(Qingdao), Qingdao 266237, China)
Aiming at the shortcomings that wave gliders cannot maintain original course well when it is disturbed by ocean currents due to their weak maneuverability and the use of simple control system to improve its anti-flow interference performance, which results in increased platform power consumption and the wear of the control system due to the frequent steering. In this paper, the dynamics of “Sea Sentry” wave glider are considered. The trajectory of the underwater tractor with different underwater tractor aspect ratio, wing spacing, aspect ratio of wing and direction of ocean current under ocean current interference is calculated by computational fluid dynamics(CFD) technology and the structural characteristics of the underwater tractor anti-flow interference is analyzed. The relationship between the relevant structure parameters of the underwater tractor and the anti-disturbance performance of the underwater tractor is obtained. This work provides a basis and reference for the design optimization of the underwater tractor structure in the future.
wave glider; underwater tractor; anti-disturbance performance; computational fluid dynamics(CFD); interference of the ocean current
TJ630; U674.941; TP18
A
2096-3920(2020)04-0376-06
10.11993/j.issn.2096-3920.2020.04.004
2019-09-20;
2019-11-30.
青岛海洋科学与技术国家实验室“问海计划”项目(2017WHZZB0101); 天津市自然科学基金重点项目(18JCZDJC40 100); 天津市高等学校创新团队培养计划(TD13-5037).
关海鹏(1993-), 男, 硕士, 主要研究方向为海洋移动观测平台技术.
桑宏强, 关海鹏, 孙秀军. 波浪滑翔器水下牵引机抗扰动性能研究[J]. 水下无人系统学报, 2020, 28(4): 376-381.
(责任编辑: 杨力军)
猜你喜欢
汽车实用技术(2022年10期)2022-06-09 11:33:32
重型机械(2022年1期)2022-03-02 02:00:06
热带海洋学报(2021年2期)2021-03-25 10:26:20
机械设计与制造(2021年2期)2021-03-05 10:00:14
青年生活(2020年29期)2020-08-14 19:45:44
兵器装备工程学报(2020年3期)2020-04-22 08:53:20
西安交通大学学报(2018年11期)2018-11-14 07:51:36
电脑知识与技术(2018年13期)2018-07-20 01:40:56
北京航空航天大学学报(2017年8期)2017-12-20 08:04:56
安徽农学通报(2017年18期)2017-10-18 21:11:49