图像匹配点云与激光扫描点云的模型重建对比
2020-09-03 03:18王震
矿山测量 2020年4期
王 震
(甘肃煤田地质局一四九队,甘肃 兰州 730010)
三维模型是对空间实体的认知与表达,可作为虚拟现实或动态监测的基础数据,三维模型比二维图像承载的信息量多,并且其可视化环境更加符合人们的思维惯性[1]。逆向工程中三维模型的数据源主要有两种,一为不同视点下摄取的图像[2-3],二为不同站点下扫描的激光点云[4-5]。对于图像匹配点云的模型重建,计算机视觉中常采用特征匹配算子提取图像特征点[6-7],并加密大量物方点。较为典型的算法有SFM(Structure From Motion)和SGM(Semi Global Matching)算法[8-9],模型的重建主要采用三角形或多边形约束的方式完成[10]。图像匹配点云较好地保留了物方实体的色彩信息。对于激光扫描点云的模型重建,规则形体主要以手动建模为主,曲面形体以自动化建模为主。曲面重建方法较多,其中,NURBS拟合是较多商业软件的优质算法,模型的重建方式与图像匹配点云类似[11-12]。激光扫描点云的色彩信息通过外搭或内置的全景相机获得,通常需要后期配备,主动性较低。
基于图像匹配点云与激光扫描点云的模型重建已有很多学者进行研究,但对于二者重建的效果和精度对比较少。因此,本文以孔子塑像为研究对象,从模型重建的理论到实践进行整体对比与分析。
1 理论基础
图像匹配点云的三维重建可理解为人眼的三维空间感知,如图1所示,假设S1,S2为摄影瞬间物镜的位置,相邻两幅图像上存在一对同名像点,左片位于A1点,右片位于A2点,两条投影光线在空间中交会于点A,根据空间前方交会的原理,可以获得对应物方点的三维坐标[13]。各幅图像提取一定数量的特征点,就形成了初始的图像匹配点云,初始图像匹配点云常用于图像的相对定向,之后即可加密大量的点云数据,点云数据获取后就可以采用多边形约束的方式建立白模,最终进行纹理映射。为避免模型孔洞的产生,采用限制多边形边长的建模方式。图像匹配点云到模型的自动化生产由PhotoScan软件平台完成,它是一款专业的数字摄影测量软件。基于图像匹配的点云重建很好地保留了物方色彩信息,而重建精度常受限于软件平台加密点云的质量与重建算法的稳定性。
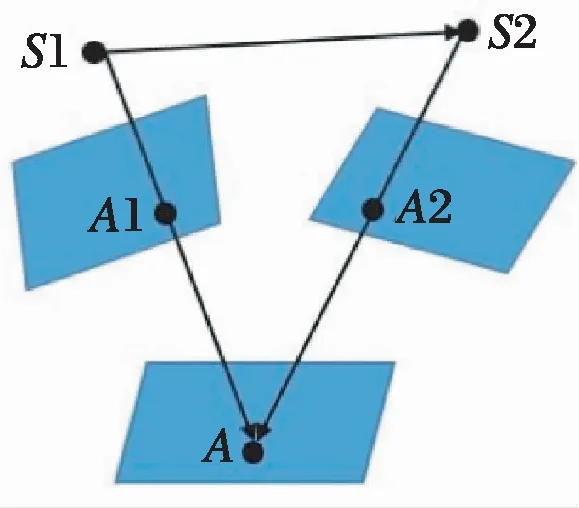
图1 图像点三角交会原理
激光扫描点云的获取直接并且简单,如图2所示,扫描仪以订制的角步径水平转动一个角度的同时,高速旋转的棱镜发射激光测距信号。为计算目标点P与扫描中心距离S,控制编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值β,物方离散点云的相对位置由扫描仪的位姿确定[14]。通常一个扫描测站不能获取整个目标,所以点云数据需要进行相对配准,三维重建主要是对离散点云进行多边形约束。与图像匹配点云类似,模型重建过程均会产生孔洞,激光扫描点云模型的孔洞填补采用曲率探测的方式,不需考虑初始多边形边长的限制[15]。激光扫描点云到模型的自动化生产由Geomagic软件平台完成,它是一款专业的点云处理软件。基于激光扫描的点云重建实现过程可读性强且精度容易控制,缺点在于建模时点云的色彩信息利用率不高。
2 图像与点云
图像数据是由一台30 mm焦距的佳能相机拍摄(EOS 750D),相机经过了畸变校正,图像分辨率为6 000×4 000。拍摄时将三脚架置平,各摄站相机高度大致相同,以孔子像为视点,半径为8 m进行全圆拍摄,拍摄瞬间自动曝光,相邻图像的重叠度保证在60%,拍摄图像数量为37张。拍摄时相机与塑像的相对位置如图3所示。
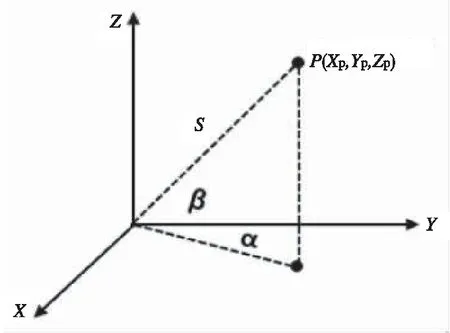
图2 扫描仪坐标点测量原理
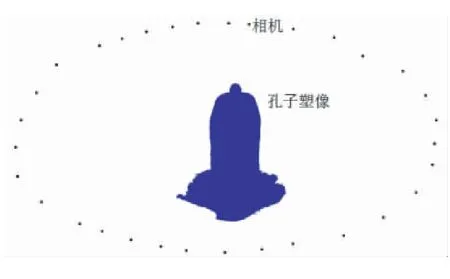
图3 摄站与塑像的位置关系
激光扫描点云数据由澳大利亚MAPTEK I-site 8820型三维激光扫描仪获取,扫描仪出厂检定合格,扫描频率分为40 KHz与80 KHz。扫描时三脚架置平,测站距孔子像8 m,扫描频率采用80 KHZ,每秒点数为235 600个,共设置4次测站,点云数据重叠度大于40%。扫描过程中扫描仪与塑像的相对位置如图4所示。

图4 测站与塑像的位置关系
3 实验的定性分析
实验使用定性分析进行数据可视化质量的评价。可视化是进行常规比较与初步评估的最简单的方法,将塑像的点云数据集与实体模型作为可视化的数据源,将3D轮廓、数据的完整性与清晰度作为评价的标准,图3为两种数据源的整体与局部示意图。图中(a)为点云与模型的整体轮廓,(b)为点云与模型的俯视图,(c)和(d)为点云与模型的局部细节图。

图5 两种数据源的总体和局部视图
3.1 3D轮廓
图像匹配点云与模型的3D轮廓连续性低,存在多余点云与模型锯齿边界的现象。图像匹配点云与激光扫描点云在密度和噪音方面存在明显差异,图像匹配点云密度较大,但噪音较多,去噪后的图像匹配点云数据对于空间量测与判读有利,但原始图像匹配点云的无序性增加了点云去噪的难度,激光扫描点云的有序性便于点云的组织以及精确测量。
3.2 完整性
由于图像以及激光扫描点云均在地面采集,所以图像与点云会存在盲区,激光脉冲反射回大量边界点信息,而图像存在一定难度,使得图像匹配点云比激光扫描点云孔洞范围大。模型建立时对于点云孔洞的修补,激光扫描点云采用点云曲率探测的方式,而图像匹配点云常采用限制三角形的方式,使得孔洞区域的填补存在凸起或凹陷的现象,完整性均可以满足要求。在忽略模型色彩的前提下,激光扫描点云模型的整体较平滑,而图像匹配点云模型色彩更接近于物方实体,对于空间实体的重建与实景漫游更有益,激光扫描点云的高精度测量便于物体的安装与检测。
3.3 清晰度
图像匹配点云数据目视效果较好,模型重建的清晰度较高,而激光扫描点云采用材质库赋纹理的方式,使得清晰度较低,若采用现场的实景照片进行模型纹理映射,效果会有显著的提高。细节部分的图像匹配点云与激光扫描点云的对比中,激光扫描点云对于凹陷与凸起的识别效果更好,层次感更佳。所以对于点云数据的特征探测,采用激光扫描点云会获得更好的效果。
4 实验的定量分析
实验使用定量分析进行模型重建精度的评价。模型重建精度是对模型重建效果与质量的最终评定,本文将内符合精度与外符合精度作为评价的标准,内符合精度主要体现在基于点云建模的误差,外符合精度主要体现在与高精度设备测量对比的误差。
4.1 内符合精度
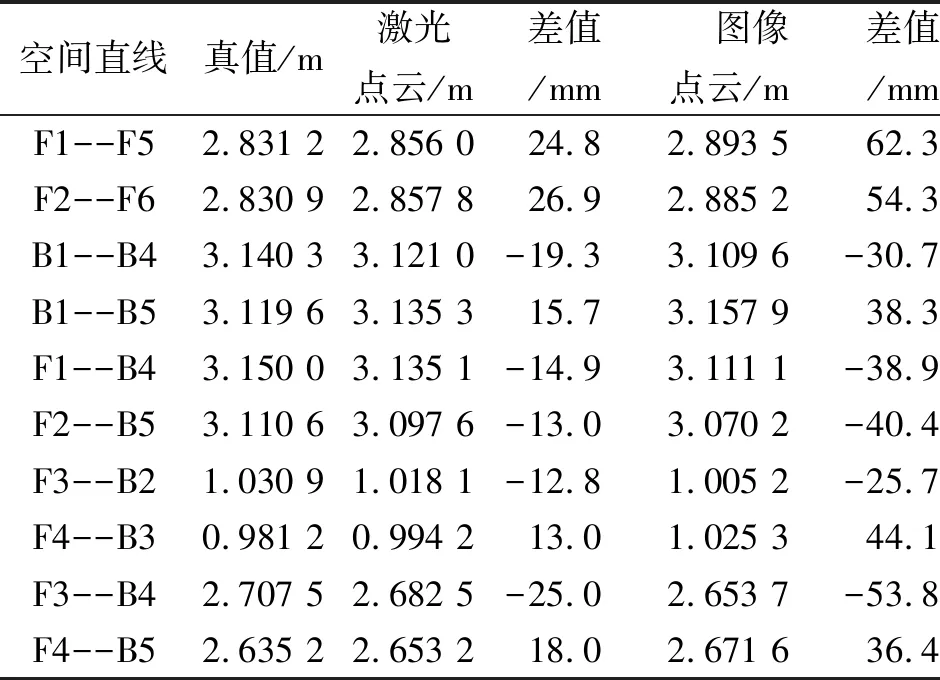
两种模型重建方式分别以图像匹配点云与激光扫描点云作为数据源,所以本文将两者偏离各自模型的欧式距离值作为评价标准。设全部点集为S{S1,S2,…Sn-1,Sn},用于模型拟合的点集为T{T1,T2,…TS-1,TS}(s 图6 点云偏离模型的距离 由图6(a)、6(b)可以看出,两种点云数据的整体偏差较小,偏差色段均处于色谱图距离范围最小的部分。但图像匹配点云存在明显的离群点,欧氏距离值较大,数量分布较多。激光扫描点云分布良好,不存在离群点,所以通过点云偏离模型的对比发现,激光扫描点云模型仿真的内符合精度较好。 内符合精度的检验主要体现在数据的可靠性与算法的稳定性,而外符合精度的检验就是评价模型重建所能达到的精度。本文利用全站仪测定十一个模型特征点,塑像前身特征点编号F1-F6,塑像后身特征点编号B1~B5。 选定十条空间直线并反算距离值,因全站仪的测距精度高于图像匹配点云以及激光扫描点云,将该值作为真值L1,基于模型量测的空间距离值为L2,距离差值V=L1-L2,外符合精度的评定遵循白塞尔公式,其中,n为观测值的数量。 (1) 距离量测值与计算结果如表1所示。通过表1可以发现基于激光扫描点云模型量测的距离差值最大为26.9 mm,差值要优于基于图像匹配点云模型量测距离的最大差值62.3 mm,激光扫描点云模型量测的距离差值整体较小,计算基于激光扫描点云模型量测距离差值中误差为20.1 mm,基于图像匹配点云模型量测距离差值中误差为46.2 mm。由于测量工作中对于模型重建精度评价的相关规范较少,所以本文仅能采用相近规范对两种成果取得的精度作进一步说明。其中,《城市三维建模技术规范》指出精细模型的基本特征平面尺寸和高度精度不宜低于0.2 m。由此可见,两种模型重建方式的最终精度均满足规范要求。此外,通过两种建模方式的对比可以发现,激光扫描点云模型的外符合精度较高,模型重建效果更趋近于实际。 表1 两种模型空间距离及差值 本文以孔子塑像为实验对象,从图像与点云的获取、加工以及模型重建入手,通过对实验数据的定性与定量分析,得出以下结论: (1)图像匹配点云与激光扫描点云均可作为模型重建的数据源,图像匹配点云的色彩信息提升了目视的效果,而激光扫描点云由于色彩的缺失,使得目视效果差,但点云数据的有序性缩短了后续去噪以及建模的时间,而图像匹配点云数据的无序性增加了去噪的工作量,同时也影响了模型重建的效果。 (2)由于拍摄和扫描视角的限制,点云数据会产生孔洞,对于孔洞的填充,进行孔洞边界的曲率探测比限制三角形边长的效果显著,所以图像匹配点云孔洞填补的算法应进行完善,为避免孔洞的出现,在条件允许时,尽量在视点的高低处分别拍摄或扫描。 (3)激光扫描点云的模型重建精度要高于图像匹配点云,但图像匹配点云模型的目视效果以及信息量要多于激光扫描点云模型,所以对于高精度模型重建需求应选择激光扫描点云,对于漫游以及高端场景的制作应选择图像匹配点云,两者应根据不同场景的需求合理应用。
4.2 外符合精度
5 结 论
猜你喜欢
微型电脑应用(2022年3期)2022-04-20
压力容器(2021年6期)2021-07-28
电子技术与软件工程(2021年7期)2021-06-16
计算机与网络(2020年7期)2020-05-15
智能计算机与应用(2019年2期)2019-05-16
电脑爱好者(2018年14期)2018-08-05
新传奇(2018年16期)2018-05-14
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年8期)2016-05-19
电脑爱好者(2015年20期)2015-09-10