浅谈电控空气悬架模糊控制系统设计和开发
2020-09-02 06:21王伟张德
汽车世界·车辆工程技术(中) 2020年4期
王伟 张德
摘 要:随着科学技术和汽车工业的发展,空气悬架已逐渐成为豪华汽车的标准配置。本文主要以半主动悬架系统为研究对象,从电控空气悬架系统构成、模糊控制理论、模糊控制系统设计、正弦激励下系统模型的仿真等方面进行设计开发总结和阐述。
关键词:电控;空气悬架;模糊控制;系统设计
0 概述
汽车的普及和科学技术的迅速发展,人们对汽车的要求越来越高,希望汽车具有良好的操作稳定性和行驶平顺性。电控空气悬架系统能够利用各种传感器检测出汽车行驶状态参数,通过核实的控制算法,最大限度地改善汽车行驶平顺性和操纵稳定性,同时降低车辆对路面破坏的影响。空气悬架电控系统对于提高整车技术含量意义深远,是一项非常值得关注和研究重要课题。
1 电控空气悬架系统构成
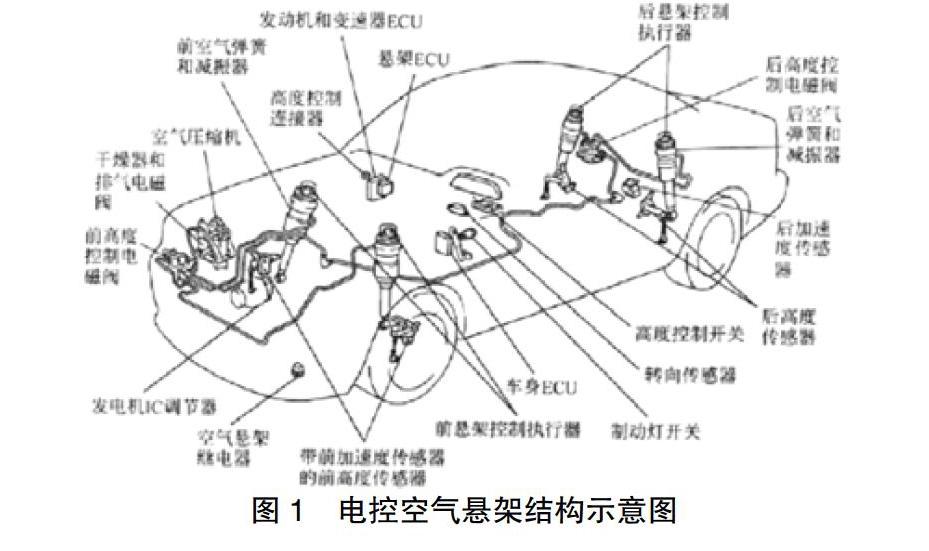
电控空气悬架主要由各种传感器(车身高度传感器、加速度传感器、节气门位置传感器、车速传感器、转向盘转角传感器、悬挂控制开关等)、电子控制单元(ECU)和执行机构(直流电动机式执行器、步进电动机式执行器、电磁阀、继电器、故障指示灯等)三部分组成,结构示意图如图1所示。
2 模糊控制理论
(1)模糊控制系统主要由被控对象和模糊控制器两部分组成。被控对象要在一定的约束条件下工作来实现人们的某种目的,由若干个装载或设备组成的一个群体。模糊控制器是整个模糊控制系统的核心部分,也是模糊控制系统与其它自动系统区别的主要标志。
(2)模糊控制器主要由输入模糊化、知识库、模糊推理和解模糊化四部分组成。模糊控制器基本设计流程如下:①输入输出变量的选定及从精确量到论域元素的转换。②输入输出变量模糊语言值和隶属度函数的确定。③模糊控制规则的建立。④输出信息解模糊化方法的建立。
3 模糊系统控制设计
3.1 系统模型的建立
由于车辆的空气悬架系统是一个复杂的非线性动力系统,很难对此建立精确的数学模型,因此就需要根据系统的具体结构形式,在精确度和模型的简化之间进行一下折中,达到研究方便同时又突出问题实质的目的。由此,把空气悬架简化为并联的空气弹簧和减振器,构建了1/4车辆两自由度模型振动系统,设置相关参数,运用牛顿第二定律建立半主动空气悬架系统数学模型,由于半主动空气悬架系统未能建立存精确的数学模型,故采用不依赖于被控对象精确模型的模糊控制方法构造模糊控制器。
3.2 模糊控制器的建立
3.2.1 确定输入输出变量及其模糊语言值
由于乘坐的舒适性主要取决于车体垂直方向的振动程度,所以我们把汽车车身垂直振动加速度作为评价汽车平顺性的主要指标。依据实际控制对象选用二维模糊控制器。取车身垂直加速度为偏差量e及相应的变化率ec作为模糊控制器的输入,悬架控制刚度后,作为控制器的输出u。其中e取7个语言值,ec和U均取5个语言值,分别表示为:E={NB,NM,NS,ZO,PS,PM,PB},EC={NB,NS,ZO,PS,PB},U={NB,NS,ZO,PS,PB}。其中E和EC分别表示控制器输入的偏差和偏差变化率的模糊集合,表示输出的模糊集合。
3.2.2 确定量化因子和比例
因子以完成从精确量到论域元素的转换设输入变量偏差e的实际变化范围即基本论域为[-10,10],模糊论域为[-3,3],故e的量化因子为3/10;设输入变量偏差变化率ec的基本论域为[-40,40],模糊论域为[-3,3],则ec的量化因子为3/40;设输出控制量U的基本论域为[-1,1],模糊论域为[-3,3],故比例因子为1/3。
3.2.3 确定各模糊变量的隶属度函数
输入输出变量均取同一區间[-3,3],据此可对输入输出变量的各词集进行赋值。一般情况下,隶属函数的变化越大,表明分辨率越高,控制灵敏度也越高,故在误差为零的附近区域多采用分辨率较高的隶属函数,假设用隶属度函数来描述语言变量模糊论域上的模糊语言值。
3.2.4 编写模糊控制规则
设计和调整控制规则的准则是汽车受到路面激励时,最快使车身垂直振动的加速度为零。即当车身垂直加速度指标较大时,选择控制量是以尽快消除误差为主,而当加速度指标较小时,选择控制量要注意防止超调,以系统的稳定性为主。
3.2.5 确定模糊判决的方法
可采用加权平均法的理论公式来得到精确控制量。
4 正弦激励下系统模型的仿真
基于上述建立的动力学模型和模糊控制方法,对半主动空气悬架系统进行了计算机仿真。以车身垂直加速度为控制目标量,对模糊控制悬架进行仿真分析。假设汽车以20m/s的速度匀速行驶,仿真时间为5s,采样时间为0.01s,在半主动悬架具有相同结构参数和路面激励的情况下,与不加控制器的车身垂直加速度响应信号进行比较,应用模糊控制的半主动空气悬架减振效果较好,车身加速度的变化比不加模糊控制的悬架有较大程度的减小。综上所述,模糊控制方法能够有效地降低车身垂直方向的加速度值,减小悬架振动的强度,从而改善了车身的稳定性和乘坐的舒适性。
5 结束语
电控空气悬架模糊控制系统设计和开发以半主动空气悬架为研究对象,构建了汽车悬架两自由度数学模型,采用了不依赖于被控对象精确模型的模糊控制方法进行空气悬架控制器的设计,在理论分析基础上进行仿真分析,验证控制策略的有效性,很好改善车辆的乘坐舒适性和安全性。
参考文献:
[1]黄志国.空气悬架控制系统仿真及试验研究[J].2005.
[2]王东亮,顾亮.履带式车辆半主动悬架模糊系统控制研究[J].拖拉机与农用运输车,2009.
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
中小企业管理与科技·中旬刊(2017年5期)2017-06-06
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年22期)2016-10-18
科技视界(2016年6期)2016-07-12
中小企业管理与科技·中旬刊(2016年1期)2016-03-16
现代电子技术(2009年13期)2009-08-31