分布式电动汽车的转向亢余容错控制综述
2020-09-02 06:21郭增江李刚赵士博张琳伟
汽车世界·车辆工程技术(中) 2020年4期
郭增江 李刚 赵士博 张琳伟
摘 要:分布式电动汽车必然是未来电动汽车发展的方向,首先对线控转向进行介绍概括,并对分布式电动汽车的转向的亢余容错控制的国内外研究现状进行分析总结,分析了线控转向系统的故障诊断的方法的国内外现状,并对容错控制进行展望。
关键词:分布式电动汽车;线控转向;容错控制
0 前言
随着无人驾驶技术的快速发展,对汽车转向系统的安全性提出了更高的要求。汽车线控转向(Steer-By-Wire)系统通过对电机的控制,完成车辆的转向过程,突破了传统机械式转向的各种限制,可以根据司机的驾驶意图、路面情况、整车运行状态灵活地对转向力、转向角进行控制,提高了整车的操控性和舒适性。
线控转向系统是整个无人驾驶系统的核心,其性能对整车会产生直接的影响,因此在线控转向系统中,各个装置运行的可靠性和安全性显得尤为重要。当转向系统发生故障时,汽车转向系统失效,正在行驶的汽车无法继续正常运行,车内乘客的安全就无法保证。現有的线控转向系统由于缺乏容错机制,无法实现由于转向电机故障并能保持继续平稳运行的功能,难以满足未来无人驾驶汽车高安全性的需求。
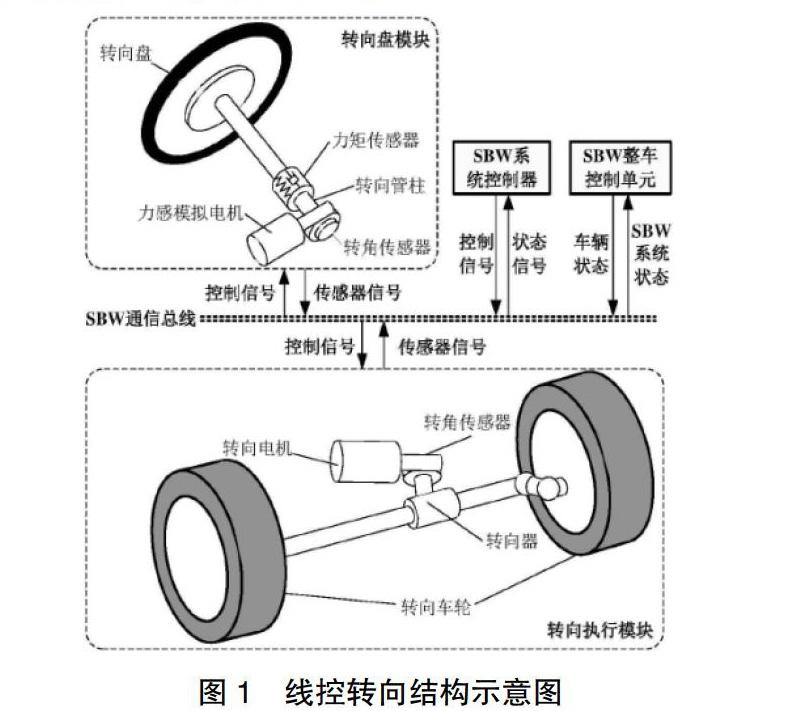
线控转向系统主要由3大部分组成,包括方向盘总成、转向执行总成和主控制器。结构图如图1所示。
图1 线控转向结构示意图
方向盘总成可以和驾驶员直接接触,并直接收到驾驶员控制,主要是由转向操纵机构、转角传感器和转矩传感器、路感模拟点击和减速器等组成。主要作用就是接受驾驶员的输入,得到输入信号,通过一系列传感器传递给控制器,由控制器根据所设计的控制策略产生的相应的信号发送给执行机构。
转向执行机构总成主要包含转向电机以及各类传感器。主要功能就收到控制器发出的信号,从而由转向电机产生合适的转矩和转角,控制车轮的转角。
主控制器是线控转向的核心,是整个系统的控制和决策中心。通过采集信号对驾驶员的意图进行判断,并根据设定好的控制策略做出合理的决策。控制转向执行总成,保证汽车能够按照驾驶员的意图安全行驶。
故障容错部分是线控转向系统不可或缺的部分,他监视着线控转向系统各个部分的工作情况,针对不同情况采取不同的措施,在部分硬件或软件出现故障时,保证汽车仍具有基本的转向能力。电源系统主要起到为主控制器、转向执行电机和路感模拟电机以及其他车载电器供电的作用,电源系统性能的好坏对线控转向系统的正常运行有着重要影响。
1 国内外研究现状
由于线控系统取消驾驶员输入系统与执行系统之间的机械连接,其在可靠性方面的要求高于传统电控系统,因此其容错控制的要求也要高于现有的成型的电控系统容错控制。国外的这方面研究起步较早,许多学者和公司从线控转向系统的各个环节入手,做了一些研究。
1.1 国外研究现状
韩国Hanyang大学和万都汽车零部件研发中心基于预测模型的冗余分析法,对线控制动系统传感器故障的容错控制策略开展了研究,其通过建立线控系统的数学模型,并以电流异常检测实现传感器的故障诊断。
美国俄亥俄州立大学Wang针对4WID电动车的驱动电机及其控制器的故障,提出了主动容错控制的方法。一旦诊断出故障后,减小故障电机的控制增益。通过使用电机控制增益估计值,更新系统控制矩阵。控制分配方法将自动的在剩余的正常电机中分配总体控制目标。
Hayama等采用双套转向系统,通常使用SBW系统,应急转向系统采用机械转向系统。这种SBW系统结构简单,易于实现和控制,但是在电子系统失效后车辆的性能可能会出现很大变化,从而引起驾驶员的不适,增加驾驶员负担。
Werner Harter等采用双套相互监控的SBW系统。这种系统有一定的优势,一旦电子系统失效,它可以避免由此带来的汽车状态输出参数的剧烈变化,车辆的可靠性、安全性得到极大提升。但是该系统劣势也很明显,因整体部件都是双份的,也就不可避免增加了成本。
1.2 国内研究现状
四轮独立线控电动车在国内的研究刚刚起步,对于转向系统故障容错控制的研究并不多。吉林大学田承伟基于黎卡提方程和自适应卡尔曼滤波理论提出了线控转向汽车方向盘模块和线控转向执行电机的参数估计方法,以此为基础,研究了基于残差监控的线控转向汽车主要传感器和电机容错控制方法。利用线控转向系统硬件在环实验台及线控转向实验车,对设计的传感器、电机及控制器的容错控制方法进行了实验验证。
吉林大学张萍结合软件冗余和硬件冗余的优势,根据线控转向试验台的特点,搭建方向盘和转向执行机构两部分的数学模型,并分别针对两部分的传感器和执行器故障进行计算机仿真,最后在XPC技术为基础的硬件在环试验台上验证所提出的容错控制策略。
重庆大学张延鹏基于过驱动系统的功能冗余,针对线控转向系统的失效问题,提出一种基于驱动或制动力矩控制分配的容错控制方法,为保证线控转向系统的安全性和可靠性提供一种思路。
南京航空航天大学秦晓熙针对稳定性控制中线控四轮向系统鲁棒性和鲁棒性能问题以及双输入双输出控制系统特性,研究线控四轮转向系统的稳定性控制策略。针对现有容错控制策略中的状态估计精度问题,基于线控四轮转向系统的高精度状态估计理论,对线控四轮转向系统进行传感器冗余设计,研究线控四轮转向系统传感器容错控制策略。
2 线控转向系统的诊断方法
基于模糊专家控制与RBF神经网络的故障诊断方法,首先利用模糊专家控制技术对传感器输出数据进行属性分类,然后将分类后的不可靠数据用来进行故障诊断。
用粗糙集模型简化冗余信息,抽取分类规则。设计利用粒子群优化方法优化的径向基神经网络,学习冗余信息简化抽取的故障规则。MATLAB仿真表明,智能故障诊断方法提高了诊断精确水平。
基于改善的自适应粒子群优化算法动态改变惯性权重和阈值,根据粒子成熟收敛度和粒子适应度自适应调整粒子的惯性权重,训练神经网络,建立了故障诊断模型。与粒子群优化算法和遗传算法相比,有效改善了神经网络训练效率,获得了较好的诊断结果。
建立滑模观测器进行基于模型的故障诊断和隔离,系统不确定性条件下处理多个传感器故障。为了抑制噪声、传感器输出相互作用、模型不确定性,基于实时、闭环反馈性能设计具有鲁棒自适应观测器的故障诊断和重構策略。硬件在环试验表明精确、可靠的用于在线故障诊断、数据再构。
针对有限参数不确定性的线性系统,设计鲁棒的基于模型的故障诊断滤波器。最大化系统和诊断滤波器的理论信道能力,把故障条件视为假定的信道的输入,把产生的分量作为输出,把传感器噪声、干扰、系统输入作为干扰源。产生的余量对故障敏感,对噪声和干扰不敏感。
研究基于滑模观测器的预测故障诊断,设计滑模观测器,利用线性车辆模型、线控转向系统和横摆角速度反馈来估计车辆转向角度。通过长范围预测方法根据估计的转向角度和当前输入预测转向角度。基于非线性滑模观测器、预测的解析冗余降低所需的冗余转向轮转角传感器的数目,保持高可靠性。用持续故障和初始故障评价提出算法的有效性,故障传感器辨识时间随预测水平增加而降低,基于预测的解析冗余算法适合处理单点故障。
3 汽车转向系统的展望
汽车线控转向系统容错使得在发生一个部件或子系统故障时仍然实现转向功能。现有的容错与故障诊断技术许多仅通过计算机仿真验证,而没有经过台架试验,尤其是实车试验更少。今后的发展趋势是通过大量的硬件在环台架试验和实车试验验证汽车线控转向系统容错与故障诊断技术的效果,为汽车线控转向系统产业化奠定基础。
4 总结
汽车线控转向系统带来了转向系统结构和控制等方面的变革,大大优化汽车操纵稳定性、舒适性等性能。提高安全可靠性、降低系统成本是线控转向系统的关键技术,容错技术需要高可靠性的传感器、执行机构等、快速故障诊断算法,发生故障时保持车辆可靠控制。
参考文献:
[1]吴方圆,孔峰,姚江云.改进S-SVR在线控转向系统容错控制中的应用[J].计算机工程与应用,2013,49(12):237-241.
[2]姜国彬.汽车线控转向系统故障诊断方法研究[D].长春:吉林大学,2009.NewYork:IEEE,2010:652-655.
[3]Yim S.ault-tolerant yaw moment control with steer-and brake-by-wire device[J]International Journal of Automotive Technology,2014,15(03):463-468.
作者简介:郭增江(1995-),男,辽宁阜新人,研究生,研究方向:智能驾驶与主动安全。