
基于多层前馈神经网络的航天器在线故障检测系统设计
2020-09-02 08:31戴峻峰
计算机测量与控制 2020年8期
戴峻峰,赵 建
(1.成都信息工程大学 网络空间安全学院,成都 610200;2.成都信息工程大学 电子工程实践中心,成都 610200)
0 引言
航天环境复杂、地面试验有限,不可避免地会出现航天器运行异常或系统故障等问题[1]。应用算法诊断技术和知识管理方法,对载人飞船、空间站、动力系统、推进系统、风云卫星等进行了故障诊断,并开发了原型系统。但是,由于这些诊断系统采用的只是单一智能诊断技术,导致其在适应性、知识获取和错误信息处理方面性能较差[2]。以往采用时域反射法设计的系统主要用于检测和分析导体绝缘故障,但是该系统采用的测量信号是较窄电压脉冲,易受原始电源信号影响,只适合于对电缆故障进行离线检测;采用频域反射法设计的系统可将扫频信号传送给待测电缆,用傅里叶变换测量反射信号的峰值频率,从而实现故障点距离的转换。尽管系统实现了对飞机电缆故障检测与定位,但由于算法复杂程度较低,难以实现实时检测,所以该方法只能用于离线检测。基于此,设计了基于 多层前馈神经网络的航天器故障在线检测系统,该系统避免了盲法故障识别,为后续轨道交通故障检测奠定了基础。
1 系统总体架构方案确定
1.1 航天器在线故障检测原理
航天器故障在线检测系统分为硬件模块设计与软件算法两部分。硬件模块以基于FPGA控制芯片的上位机采集板核心,通过物联网技术将PXI机箱、FPGA控制芯片及电路板主、子适配器互联成专属网络,用以接收处理故障定位信息;软件部分引入多层前馈神经网络,构建识别器,采用确定性逻辑推理规则得出故障条件,设定故障阈值,将故障信息传输至硬件模块PCI主控芯片,完成航天器在线故障检测。
1.2 航天器在线故障检测总体架构
航天器故障在线检测需增加激励信号,使其与测试信号相分离,使测试信号与输出信号相对应,并分析输出信号,以确定缺陷所在模块[3]。失效位置应该是模块级别或者设备级别,在待测电路板上加装模拟信号、数字信号及开关控制信号,以确定响应信号是否满足预期处理标准[4]。系统总体架构设计如图1所示。
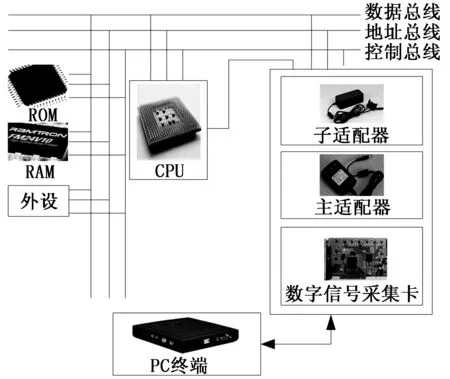
图1 系统总体架构
在图1中可以看到,子适配器与测电路板相连,同时连接主适配器。主适配器引导 PXI机箱内的板卡资源,并将其连接到通用 PC终端[5]。主机控制 PXI箱内产生响应激励信号[6]。在被测电路板之中引入激发信号作为电路板识别信号,完成系统在线故障检测[7]。
2 硬件结构设计
2.1 PXI机箱
采用工业标准 PC组件为核心模块,结合高级触发及同步扩展背板,使得PXI机箱能够完成系统模块化封装结构,提升系统可扩展性。通过 PC机控制 PXI测量模块[8-9],从而实现对测量模块的远程控制。上位机控制PXI系统各个模块,通过遥控实现对各种数据操作[10]。PXI机箱结构如图2所示。

图2 PXI机箱结构
嵌入或远程 PXI机箱插槽可容纳 PXI模块,混合外设 PXI Express外围模块、32位Compact PCI外围模块以及混合兼容 PXI外围模块均可在 PXI机箱外设上使用。PXI外设模块和 PXI 内部模块定时模块可安装在同一个系统定时槽内,利用MXI-4接口工具,无需额外编程,具有一整套驱动接口软件[11]。
MXI-4接口工具包括PC-PXI桥接器系统,包括 PCI接口卡插入 PC机、PXI接口卡插入底板、高速互连光纤,通过接口组件连接PC机。利用MXI-4接口工具实现远程遥控,使 PC机可以控制 PXI机箱,通过电隔离光纤连接,无需额外编程,保证MXI-4是透明的。系统采用200米的光纤连接或10米的铜线连接,采用MXI-4级光纤连接方式,能较好解决外界对系统定位识别干扰[12]。
2.2 芯片外围结构
FPGA的EP3C10芯片外围结构如图3所示。

图3 FPGA的EP3C10芯片外围结构
可编程控制器外围采用20 MHz有源晶振型号外围时钟,为电源提供3.3 V和1.2 V电源,供给各个端口;软核处理器采用高速动态随机存取存储器,并提供系统软核程序运行空间。当该空间关闭时,所有内部逻辑配置信息都会丢失,作为 Flash的EPCS4仍然能够保存相关配置信息和程序。EPCS4在电路重新启动时自动提供 逻辑配置信息,读取EPCS4配置信息,重启配置 FPG逻辑,实现开机自动启动。GPS导航模块是系统软核外设,使用 SD卡备份数据,下载 JTAG是 FPGA程序一个编程界面,外围时钟输入是由20 MHz主动晶体振荡器提供的。
2.3 电路板主、子适配器
2.3.1 主适配器
主适配器的主要是将硬件资源与子适配器连接起来,使子适配器能够自主选择硬件资源。所以,综合考虑多种测试板的需求,在设计主适配器时,将测量硬件资源与断路器开关板相连接。由于所要连接的管脚相对较多,因此,继电器使用数量应根据管脚数量来决定。
2.3.2 子适配器
对于子适配器的设计,其主要目标是通过连接器将待测电路面板和主适配器上的继电器连接。在设计每一个子适配器时,需要清楚地将继电器模块的管脚与待测管路相连的情况指出。另外,在数字 I/O方面,可以在不通过继电器情况下,尝试直接与数字输入输出模块连接。在设计中,有必要指出测试管脚与数字 I/O模块通道相连接,保证每个子适配器上都有一个对应电路。
2.4 上位机采集板
设计了基于FPGA控制芯片上位机采集板,如图4所示。

图4 基于FPGA控制芯片上位机采集板
利用2个高速 AD转换器差分采样,通过 FIFO的一级缓冲技术将数据传输至动态存储器之中。在该系统中,故障发生到跳闸所需时间不超过1秒,由此选择容量为128M的动态存储器可以在故障排除时保存出现故障信号。在 动态存储器数据已存满情况下,PCI主控芯片将动态存储器中数据传送至下位机存储器之中,由定位程序确定故障位置。
2.5 电子负载板设计
被测板具有一个上拉电阻引脚,在引脚与地面的阻值相等情况下,外接一个阻值与上拉阻值一致的电阻,测量该电阻的引脚电压,控制该部分电压值为引进引脚电压的一半;对于具有下拉电阻的被测板引脚来说,只需添加一个与下拉电阻值相同上拉电阻即可。由于上拉电阻与下拉电阻阻值不同,所设计的电子负载板具有多种阻值设计方案,负载板设计如图5所示。

图5 电子负载板继电器控制模块
分析图5可知,普通 PC机与LM3S600通过串口通信。而LM3S600通过驱动芯片控制继电器的插入,可选择不同继电器配合不同阻值,使每一个继电器的电阻模块都是独立的,形成可调电阻串联模式,在此情况下,对于不同的引脚电压可以选择不同的电阻设计方案,完成电子负载板设计。
3 系统软件设计
3.1 多层前馈神经网络识别模型
基于多层前馈神经网络在线故障检测器设计就是在多层前馈神经网络支持下,构造出系统实际应用状态,识别模型如图6所示。

图6 识别器结构
多层前馈神经网络在线故障检测器设计思路为:
1)多层前馈神经网络输入:输入变量x(t)、状态变量y(t),训练多层前馈神经网络,使其成为系统中非线性函数g(x(t),y(t))。
3.2 识别规则库构建
依据上述内容,识别门限值。判定要求如下所示:
在n个参数中,存在m个参数超过下限,由此形成某种故障,应对其采取对应处理措施。在多层前馈神经网络支持下,采用确定性逻辑推理规则,由此成立故障条件共有k种:
(1)
设参数集合为Q(a1,a2,...an),其中每个ai都对应一个上限或下限αi,该值为设定的阈值,只要超过这个阈值,参数即成为故障成立的一个合取(∩)条件。
在n、m值都相对较小情况下,设置Pi为规则名称,G表示故障模式,由此构建的知识库如下所示:
P1:(a1≥α1)∩(a2≥α2)→G
P2:(a2≥α2)∩(a3≥α3)→G
⋮
Pi:(ai≥αi)∩(ai+1≥αi+1)→G
(2)
通过比较上限值,可选择一条合适规则,完成规则库构建。
3.3 在线故障检测流程
在航天器发射提升部分,管理系统模块诊断中的中央处理机根据返回的数据,定位识别推进子系统能否正常工作,如果出现异常情况,则需根据有关参数收集切换设备状态。具体工作流程如图7所示。

图7 定位识别流程
从上述流程中可知,在线故障检测应先根据设定的阈值比较各输入参数。若超出阈值,则判定参数有故障;否则正常。之后再判断参数确定曲线是否满足要求,如果满足,则参数输出为正常,否则为故障。
4 实验结果与分析
为了方便系统调试,引入可视化编程模块Matlab GUI,在短时间内就可编写分析界面,通过该界面可知基于多层前馈神经网络的航天器在线故障检测系统调试结果。
4.1 Matlab仿真调试
用 Matlab对 Simulink进行仿真,如图8所示。
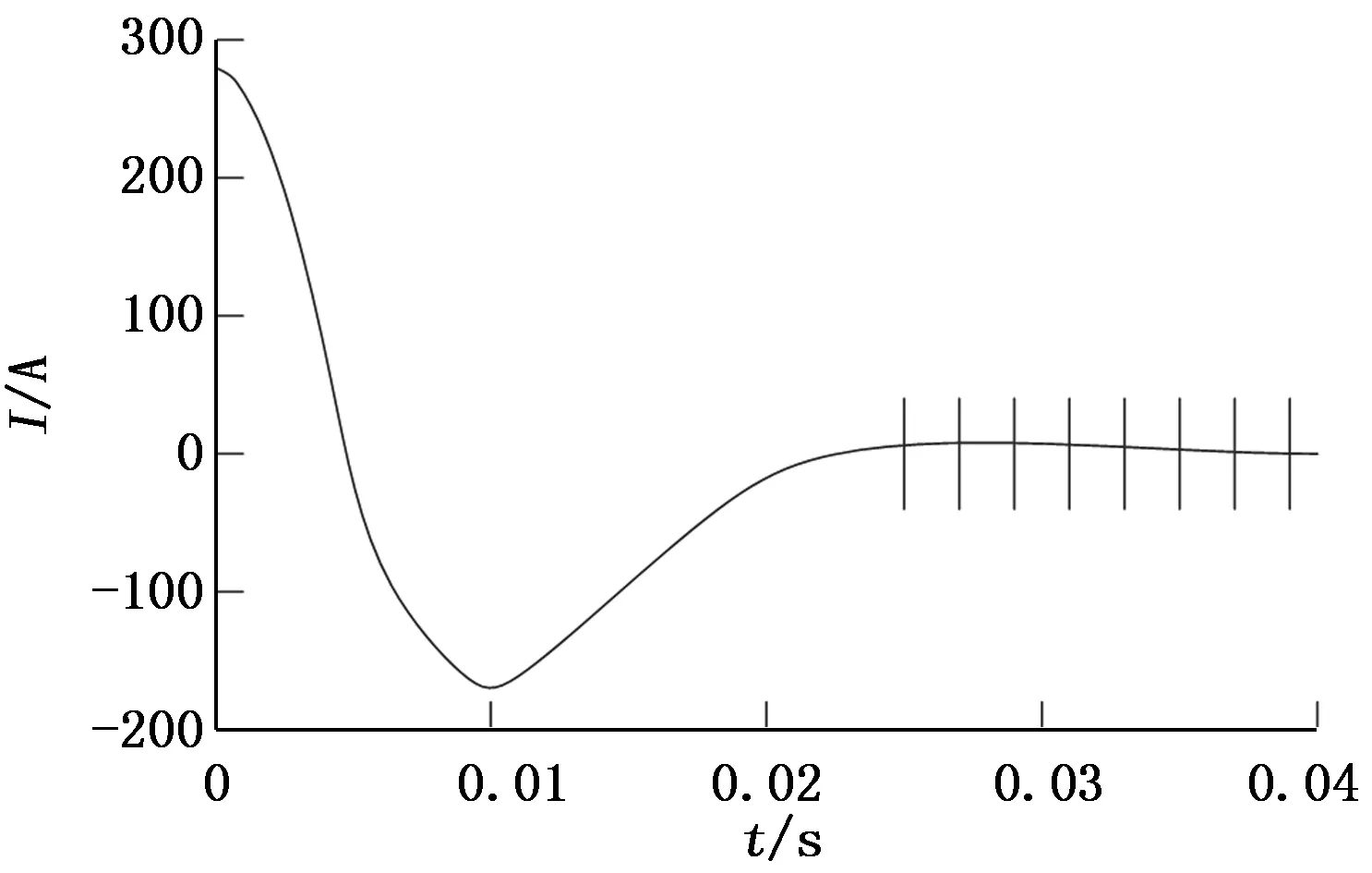
图8 Matlab仿真调试结果图
该系统模拟的是航天器运行线路,该信号发生器将1 MHz的5个正弦波周期注入系统,注入时间为0.02 s。在0.02 s之后,滤除工频50 Hz的正弦波用数字滤波,留下1 MHz频率高频波。
4.2 故障模式确定
故障模式如表1所示。

表1 故障模式
4.3 调试结果与分析
采用中心频率为60.5 MHz的识别信号,分别采用时域反射法设计的系统A1、频域反射法设计的系统A2和基于 多层前馈神经网络设计的系统A3对识别信号阻断效果进行对比分析,如图9所示。
由图9可知,采用时域反射法设计的系统,定位识别曲线杂乱无章,无法从中提取出航天器故障正确信息。而使用频域反射法设计的系统虽然比时域反射系统定位识别曲线要规整,但与实际定位识别曲线相差较大。而基于多层前馈神经网络设计的系统定位识别曲线已基本接近实际曲线,在距离为2和6 m时达到最大幅值0.9,这表明信号阻断效果十分优异。
在上述对比结果下,分别将3种系统在不同故障模式下的检测效果进行对比分析,结果如表2所示。

表2 3种系统检测效果对比分析
由表2可知:基于 多层前馈神经网络设计的系统与理想故障模式检测结果一致,而其余两种系统存在个别故障模式情况,但大部分都与理想故障模式不一致。因此,基于多层前馈神经网络的航天器在线故障检测结果更加精准。
5 结束语
针对改进目标系统的故障自动诊断问题,以航天器故障定位系统为研究对象,采用 多层前馈神经网络,对该系统中的执行机构进行在线故障检测,通过相关仿真实验验证了系统识别的有效性。对基于多层前馈神经网络的航天器在线故障检测问题进行了深入研究,取得了初步成果。鉴于实验条件限制,还需从以下方面进行完善:
1)识别器设计时,模拟曲线将产生一定程度的偏差振荡,从而影响设计效果。多层前馈神经网络的激活函数选择增加了网络运算量,因此有必要在识别器设计中寻找新的方法,以减少因突变引起振荡,从而提高估计或诊断准确性;
2)多层前馈神经网络在不确定因素和外部干扰影响识别过程中,其成功操作的前提是一个设备故障,而另一个设备正常。该部分实验验证适用于不同设备同时发生故障时,需要更多神经网络,计算量更大,需要考虑因素更多。
猜你喜欢
国际太空(2022年7期)2022-08-16
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
科学与财富(2017年24期)2017-09-06
舰船科学技术(2017年5期)2017-06-19
电脑爱好者(2016年22期)2016-12-16
微型计算机(2016年3期)2016-03-16
轻兵器(2015年20期)2015-09-10
现代计算机(2009年9期)2009-12-02
