
基于深度机器学习的霾污染监测技术
2020-09-02 08:31贺园园胡小敏梁腾飞
计算机测量与控制 2020年8期
贺园园,胡小敏,梁腾飞
(西安交通工程学院 土木工程学院,西安 710300)
0 引言
工业持续快速发展,导致空气污染现象逐渐严重,在空气污染中,霾污染作为一种较为常见的空气污染现象存在于人类生活中,而霾污染则会影响人类的日常生活,甚至对人体造成伤害[1]。在现代霾污染监测环节中,一般采用遥感技术对霾污染进行实时监控,在较为精准的程度上掌控雾霾的形成地点及形成原因,以此来进行霾污染的治理,在数据收集的过程中,由于其监测范围较为固定,所受人工外力影响较小,测量的结果相对准确,且数据偏于稳定趋势。在此基础上,需要同时对其大气覆盖的地面进行有效研究,根据研究结果进行进一步的实验分析与总结,保障监测对象的存在完整性,加强数据系统操作,并辅助视野较广泛的无人机进行高空监测,获取较为科学的雾霾污染信息[2]。为此,对于霾污染的监测及治理逐渐得到人们的关注。
目前已有学者对霾污染监测技术做出了研究,并取得了一定的成果。文献[3]提出基于单片机的雾霾监测系统。以STC12C5A60S2单片机为核心,分别设计了数据采集模块、传输模块及处理模块。该方法精度较高,但对图像收集的清晰度较低;文献[4]提出基于VIRR传感器的霾遥感识别方法,以监测数据为基础,采用可见光的反射率阈值方法对雾霾情况进行遥感识别。该方法能够较为准确地完善数据信息,但对于信息采集方面的力度较小,无法保证收集的图像数据的精准性,且耗费的监测时间较长,投资成本较高。
为此,针对以上问题,本文提出一种基于深度机器学习的霾污染监测技术。通过对霾污染数据的收集进一步完善数据收集系统信息,加强对数据的整合与处理,强化中心系统的数据储存能力,保证监测数据来源的可靠性,在此基础上对收集的数据进行处理,根据数据通道的不同将收集的数据信息进行划分,同时加强系统过滤操作,进一步完善数据信息的准确性,最后对处理后的数据进行监测操作,根据不同的监测对象有针对性地进行实验选择,根据霾污染的各项特征进一步提升监测系统的监测力度,最终达到对霾污染监测的目的。该技术在一定程度上实现了对数据的有效分析,完善了监测系统的数据监测能力,操作简便,成本较低,能够更好地为使用者所使用。
1 基于三维空间分布图像的霾污染数据采集
由于霾污染的存在具有高度的特殊性,为此,需对其进行污染数据收集,并对其产生的地点进行精准划分,以便操作能够更好地进行。
本文利用监测机器对霾污染生成地区的地形、地面设施以及空中状况进行研究,并将临近区域作为实验地点,进一步追踪霾污染数据存在的状况及相关信息,对霾污染产生的不同季节与环境进行分析,根据不同时段的霾污染状况进行类别分析,同时对不同时间段进行机器数据追踪,其追踪图如图1所示。

图1 追踪图
将获取的追踪信息进行整合,同时划分集合A作为数据的存储集合,并在数据储存的基础上强化数据分析能力,将霾污染样本与监测数据相结合,并进行数据比较,分析其比较结果,同时对其进行性能研究,利用霾污染在不同浓度空间的存在结果分析,进一步研究其时空分布及分布规律,以此掌控霾污染可能存在的条件,多次进行机器飞行追踪实验,根据不同的污染项目组对霾污染进行数据监测,将较为典型的数据放置在实验区域的三维分布空间内[5]。其三维分布空间如图2所示。

图2 三维分布空间图
同时加大系统控制操作,找寻污染物存在的垂直分布规律,并将机器进行垂直分布组合操作,完善机器分布规律,进而实现对污染物的标准获取,在三维分布监测过程中,监测凌晨时间段以及太阳辐射能力最强时间段的霾污染程度,并将获得的污染数据进行存储操作,测量此种状况下的大气地面累积气压以及气流状况,并分析空气流通情况,进一步完善水平方向的空间监测系统,防止污染物的流动,保证数据完整[6]。
由于污染物受所处温度的影响较大,为此,在监测过程中应不断注意研究区域的温度上升状况,排除存在的特殊状况,同时注重温度存在对数据监测的可行性影响,根据不同的航次数据对不同高度的温度数据进行观测,并保证在监测过程中尽量缩减查询范围,降低监测难度,从而保证监测效率,延长监测系统使用年限。降低污染物对于空气流动的敏感程度,避免不必要因素对数据收集的影响,并加强系统收集的力度,强化中心系统的收集,进一步提升数据收集的图像完整性,以便后续操作的进行[7]。
结合温度垂直轮廓对数据进行分析,整合符合所需数据特征的数据,并将数据进行分类,集中研究分类后的数据信息,并生成数据库,在生成的数据库的基础上完善数据分析研究,掌控霾污染生成的合理区间,在大气层趋于稳定的状况下对霾污染数据进行再次集中收集操作,绘制三维空间图,并不断推测污染数据产生与温度的关系,并观察其递减斜率与时间的关系,检测关系数据是否符合预测目标,同时将最终的收集数据整合至集中集合A中,以此进行下一步的数据处理操作[8]。
2 基于深度机器学习的霾污染数据处理
深度机器学习结合了深度学习和机器学习两种算法,深度学习能够通过迭代完成学习,寻到最优解,而机器学习是将深度学习人工智能化的一种手段。深度智能学习是利用深度神经网络来解决特征表达的一种智能学习过程。为处理霾污染数据,引入深度智能学习算法,对霾污染数据进行收集,查询数据类型,将不同类型的数据代入至神经网络作为输入层数据,通深度过迭代得到兴趣区域,通过规则处理合成数据,进一步进行角度处理,提升数据监测处理效能,通过上述步骤完成对霾污染数据的监测及处理。
首先根据霾污染数据的浓度信息以及深度机器学习的输入数据类型对收集数据进行分类[9]。并对数据的适用范围进行研究,同时不断过滤产生的干扰数据,在数据生成的过程中加大处理力度,并经过以下步骤完成对收集数据的预处理:
1)利用机器软件对待处理数据进行读取,并检测其存在的状况是否符合所需状况,此时,机器软件将自动打开处理系统对数据进行辐射矫正,并将矫正结果进行记录与存储,其矫正图如图3所示。
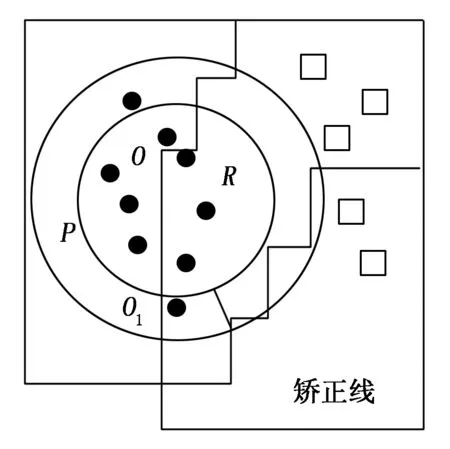
图3 矫正图
2)对数据的发射率通道进行数据类型查询,并将查询获取的数据进行几何矫正操作,使用机器软件系统加强数据矫正处理。在矫正的过程中利用定位系统加大对数据的位置固定处理,同时建立地面控制点,选取标准的发射率作为辐射数据处理通道,并以此作为数据处理标准点对其他通道数据进行相应的数据处理与操控,对产生的辐射率进行几何矫正控制,根据发射率产生的数据传输功能加大对反射率文件的处理[10]。
3)进一步对兴趣区域进行提取,并利用机器行政区域提升数据的兴趣操控,并检查行政区域图像,利用语言软件选择相同的数据处理区间,根据不同的经纬度范围对数据进行确认,同时对数据发射率文件以及反射率文件进行处理,裁剪所需的数据信息,同时加强理论处理,在集中数据的同时掌控数据存在的必要条件,并根据存储空间确定数据处理状况,若区间提取的范围一直,则认定处理的数据在一定程度上存在着相似性,且处理的数据图像存在着相关性,将兴趣区域进行合成操作,并将发射率通道的数据存储至中心系统,并将发射率文件置于系统顶部,将反射率通道数据存储至主系统中,并将反射率文件置于系统底部[11]。依次形成顺序文件将数据进行处理分类,根据几何矫正的数据特征分析数据处理所需条件,并将其与兴趣区域提取的数据进行图像合成操作,选择适合的规则将图像进行规则处理,最终获得合成数据[12]。
4)将所获取的合成数据进行进一步的角度处理,并设计其角度处理,如图4所示。
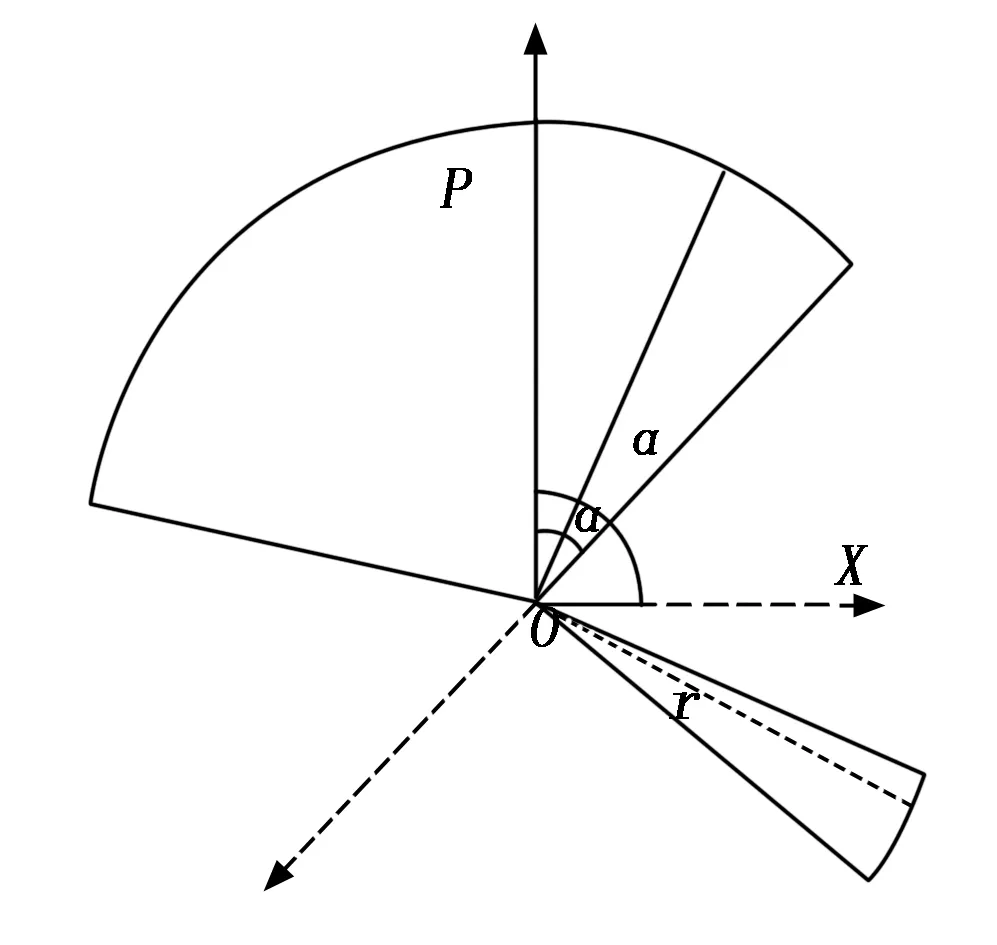
图4 角度处理图
将数据的角度数据集系统打开,利用文件特征对其进行数据角度矫正,同时提取矫正后的裁剪角度数据,并根据不同的太阳仰角及俯角标准度数对数据进行整合分析,同时按照卫星所处顶角以及辐射角对数据进行角度处理研究,并按照大小将角度数据进行排列,重新组合数据,获取新的向量数据组,并将数据组按照时间顺序进行调整,进一步提升数据的事件处理效能,采用时间理论分类处理角度数据,按照中心系统指令完成数据图像处理任务,以完善系统的综合处理性能,并在处理过程中注重对系统自身监测系统的保护,增强系统操作安全性,提升其可持续发展能力。经过以上步骤,实现对霾污染数据的处理操作[13]。
3 霾污染缠身的条件种类及监测技术
在完成对霾污染数据的处理后,进一步进行霾污染监测操作,并将霾污染产生的种类与条件进行分类,精准监测霾污染存在状况。
本文将霾污染监测分为以下几种状况:
1)对气溶胶的厚度进行监测。由于空气污染中气溶胶的含量较大,对其的监测能够更为直观的反应霾污染程度。环境中的气溶胶的含量由其厚度所反映,为此,本文在天气状况不改变的条件下对气溶胶的密度进行监测,并将监测数据单独记录,以避免与其余数据混合,并尽量在短时间内完成对指定空间气溶胶密度的检测,并掌握其范围信息,对雾霾产生的根源数据进行明确解析,并利用机器遥感对影像数据进行监测,同时进行气溶胶光学的厚度反应,完成初始气溶胶监测操作。其遥感监测图如图5所示。

图5 遥感监测图
2)进一步对霾污染中具有毒性的二氧化硫及二氧化氮物质进行监测,以处理后的霾污染数据为起源点,将二氧化硫与二氧化氮进行杂质比例对比,将环境中的植物接触到二氧化硫及二氧化氮所产生的红外线反射能力强弱作为监测依据,观察植物状况,同时对其进行深度分析,分解数据监测所需要求,结合不同图像的生成需求对监测范围进行重新调整,在影像监测的过程中综合考虑图像数据的重合类别,并将此些数据进行对比,有效分析霾污染中有害物质的存在比例[14]。
3)对秸秆燃烧后的杂质进行霾污染监测,将排出的不同性质的杂质与处理数据进行对比,查找其存在的相似性,由于此些杂质含有大量有毒物质,为此,在监测过程中应不断注意对杂质发生源的集中处理,并固定霾污染监测位置,以便简化监测操作,借助高温像素元与背景像素元在不同长度的辐射段中的能量差异对地面产生的霾污染进行识别,进一步提升系统监测的精准度,根据火点的位置明确霾污染发生地点,并集中实施监测操作[15]。
4)对外界环境中的沙尘暴进行霾污染监测,对大气中漂浮的杂质进行集中研究,同时对环境流场进行监测,分析环境存在条件,对沙尘产生的各个阶段进行集中分析,并总结出时段表,以便监测时间的选择。对未来一段时间内的环境质量进行预测,同时制定相应的防控措施,明确其发展规律及产生范围,较为清晰的观察其影响范围,并避免监测失误的产生,其范围明确图如图6所示。
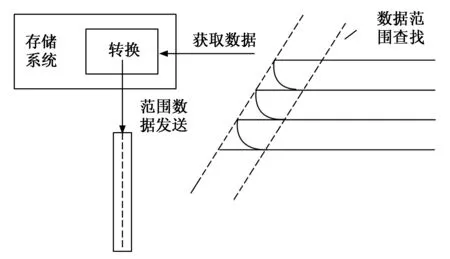
图6 范围明确图
5)利用机器遥感技术进一步增强对工矿环境的霾污染监测,将其中各种性质的杂质进行主要成分分析,避免监测错误,对环境中的潜在因素进行整合,降低无关因素的干扰,提升监测系统的监测准确度。
在经过以上的霾污染分类后,完成最终的霾污染监测。
4 实验与研究
4.1 实验目的
为了检测本文基于深度机器学习的霾污染监测技术的监测效果,与传统基于深度机器学习的霾污染监测技术的监测效果进行对比,并分析实验结果。
4.2 基于深度机器学习的霾污染监测环境
针对深度机器学习的技术特殊性以及霾污染监测的复杂性,对其进行分析,基于深度机器学习的霾污染监测环境如图7所示。

图7 基于深度机器学习的霾污染监测环境
根据上述基于深度机器学习的霾污染监测环境,进行实验参数的设定,如表1所示。

表1 实验参数表
4.3 实验结果与分析
根据上述监测模型进行实验对比,将本文基于深度机器学习的霾污染监测技术的监测效果与文献[3]方法、文献[4]方法的监测效果进行比较,得到的监测准确率对比图及监测图像收集完整率对比如图8所示。
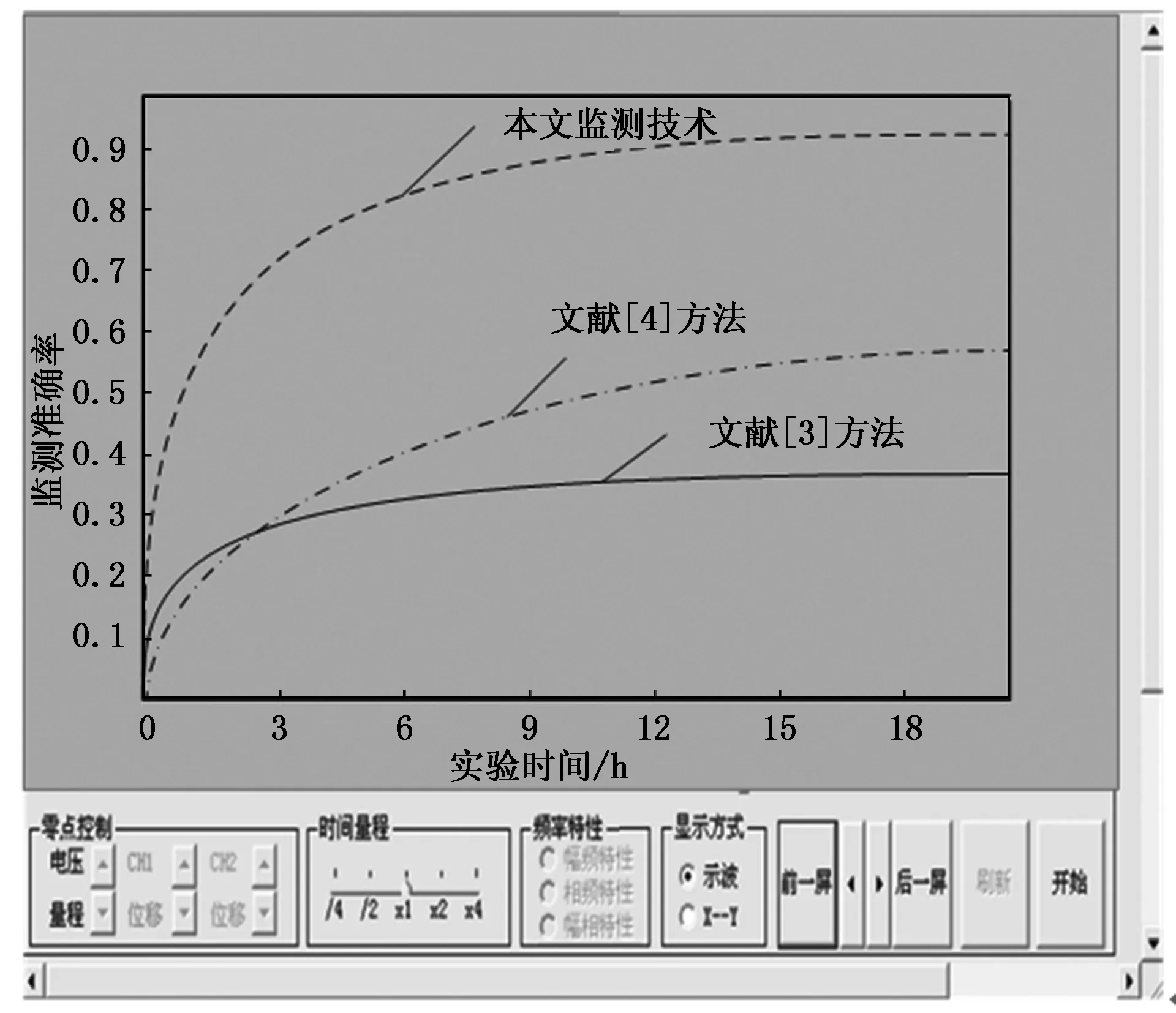
图8 监测准确率对比图
对比图8可知,在相同的参数条件下,文献[3]方法的监测准确率平均为30%,文献[4]方法的监测准确率平均为50%,而本文基于深度机器学习的霾污染监测技术的监测准确率较高,平均约为90%。造成此种差异的主要原因在于本文对霾污染数据进行收集,加强了对数据的掌控,同时在相同的条件下有利于对监测实验的开展,能够更好地获取有效数据,消除其他因素的干扰,减少不利因素的影响,最终获取较为完善的监测图像,同时便于对监测对象的研究,增强实验集中性,降低监测误差,进一步提升监测系统监测性能,最终获取较高的监测准确率。而传统方法对此方面的处理较差,初始数据处理不完善,监测准确率较低。
对比图9可知,在监测样本数量为100个时,文献[3]方法的监测图像收集完整率为20%,文献[4]方法的监测图像收集完整率为30%,而本文监测技术的监测图像收集完整率为60%,在监测样本数量为200个时,文献[3]方法的监测图像收集完整率为25%,文献[4]方法的监测图像收集完整率为38%,本文监测技术的监测图像收集完整率为68%,本文监测技术的监测图像收集完整率平均值为82%,由于本文对收集的霾污染数据进行二次处理,利用辐射矫正以及几何矫正的方法加强对数据的处理分析,根据发射率通道的数据进行集中整合矫正,进一步实现了对数据的大规模处理,提升处理的速率,加强对监测图像的完整度再现操作,完成数据的高度处理,强化图像的清晰度,增加有用图像数据的摄入,提升图像收集的完整程度。
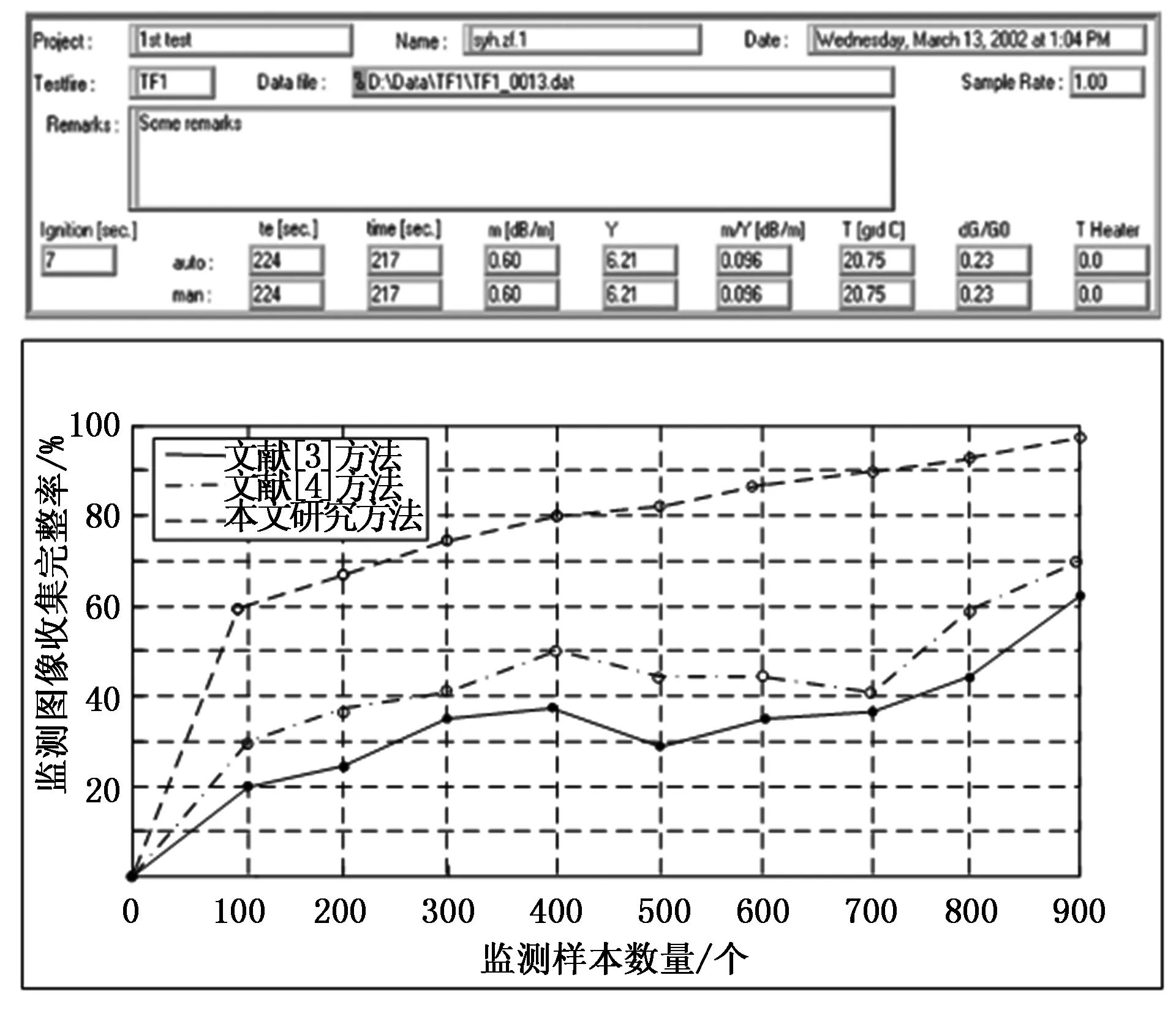
图9 监测图像收集完整率对比图
在此后的监测中,随着监测样本数量的不断增加,本文监测技术的监测图像收集完整率不断提升,且一直位于传统监测技术之上。除以上原因外,本文提升对霾污染的监测力度,从不同的方面阐述霾污染的监测方式,进一步加强系统的监测图像收集能力,具备较高的数据收集性能,在处理的基础上强化了中心监测技术,加大对数据的监测改造,减少无关图像的干扰率,提升系统图像收集相关性,获取更加完整的监测图像数据信息。采取一定的系统自动清理措施,便于后续图像的查询。
经过以上对比分析可知,本文基于深度机器学习的霾污染监测技术的监测准确率与监测图像收集完整率均高于传统监测技术。在较高的程度上提升了系统的监测性能,同时能够更好地实现对监测图像的有效利用,完善监测信息,具备较好的研究价值。
5 结束语
本文在传统监测技术的基础上研究了一种新式基于深度机器学习的霾污染监测技术,首先对霾污染进行数据收集,根据不同的霾污染影响程度对数据进行分类收集,在收集的过程中加强过滤系统性能,减少不利因素的干扰,进一步增强系统自身收集能力,在数据收集的基础上实现对收集数据的处理操作,根据辐射矫正及几何矫正对数据图像进行综合分析,在获取分析结果后,对分析数据信息进行监测,以不同的霾污染方面作为监测点,同时辅助信息查找及数据解析功能,进一步提升整体系统的监测能力,在最终监测中能够增强中心系统的自主保护能力,实现对霾污染的准确监测。
相较于传统监测技术,本文基于深度机器学习的霾污染监测技术在较高程度上提升了中心系统的自主学习能力,增强系统监测性能,能够更好地为监测中心提供准确的数据信息来源,具备更好的发展空间。
猜你喜欢
环球时报(2022-07-13)2022-07-13
快乐学习报·教育周刊(2022年16期)2022-05-01
新高考·高三数学(2022年3期)2022-04-28
环球时报(2022-03-14)2022-03-14
法制博览(2021年15期)2021-07-02
科技传播(2019年23期)2020-01-18
福建基础教育研究(2019年6期)2019-05-28
人民调解(2019年2期)2019-03-15
电影(2018年8期)2018-09-21
Coco薇(2015年7期)2015-08-13
