基于船舶领域的碰撞危险度评估模型
2020-09-01 03:14朱凯歌史国友汪琪刘娇
上海海事大学学报 2020年2期
朱凯歌 史国友 汪琪 刘娇


摘要:为解决船舶避碰决策中对碰撞危险度计算精度不足和对危险目标船辨识性差的问题,使用基于Coldwell船舶领域的危险识别参数改进多船避碰危险度评估模型,比较改进前后模型的精度。使用VC+ +实现船舶MMG运动模型,对基于改进模型的四船交叉会遇态势作避碰决策仿真。仿真结果表明:对同一危险船,改进模型的精度更高;在多船会遇中,改进模型能够识别运动参数相似的危险目标船,辨识性更高。改进模型可为更复杂的多船避碰决策提供理论支持。
关键词: 船舶领域; 碰撞危险度; 多船避碰; MMG模型
中图分类号: U675.96 文献标志码: A
Valuation model of ship collision risk based on ship domain
ZHU Kaigea,b, SHI Guoyoua,b, WANG Qia,b, LIU Jiaoa,b
(a.Navigation College; b.Key Laboratory of Navigation Safety Guarantee of Liaoning Province,
Dalian Maritime University, Dalian 116026, Liaoning, China)
Abstract: In order to solve the problems of insufficient accuracy of collision risk calculation and poor identification of dangerous target ships in ship collision avoidance decision-making, the multi-ship collision avoidance risk valuation model is improved using risk identification parameters based on the Coldwell ship domain, and the accuracy of the models before and after improvement is compared. VC+ + is used to implement the ship MMG motion model, and the collision avoidance decision-making simulation on the four-ship crossing encounter situation based on the improved model is carried out. The simulation results show that: the improved model is of higher accuracy for the same dangerous ship; in multi-ship encounters, the improved model can identify dangerous target ships with similar motion parameters, which is of high identification. The improved model can provide theoretical support for more complex multi-ship collision avoidance decisions.
Key words: ship domain; collision risk; multi-ship collision avoidance; MMG model
0 引 言
在海上船舶會遇态势中,使用雷达标绘结合最近会遇距离(distance of closest point of approach,DCPA) 和最短会遇时间(time of closest point of approach,TCPA) (分别用dCPA和tCPA表示)计算船舶碰撞危险度有较强的可实施性。然而,随着海上船舶大型化的发展[1],该方法的精度越来越不能满足航海需要,主要体现在未考虑目标船速度、航向的变化且在两船距离较近时未考虑船舶大小,导致对碰撞危险度计算延迟或精度不高,致使船舶避碰局面的代价函数精度低、误差大,进而使最终的多船避碰决策存在避让角度过大、避让时间较长等问题,失去参考价值。
对于此问题,国内外许多学者做了相关研究。COLDWELL[2]对港口船舶数据进行聚类分析,提出了存在偏移值的船舶领域,使船舶领域形状不再局限于圆形;LISOWSKI[3]使用最优控制和博弈论方法分析了船舶运动过程并提出了基于dCPA和tCPA的碰撞危险度计算公式,有效提高了避让代价函数的精度;SZLAPCZYNSKI等[4-5]等基于船舶领域提出了缩放领域的思想,改善了基于传统危险识别参数进行计算存在的忽视目标船参数的问题;刘冬冬等[6]提出了模糊四元船舶领域模糊评价模型,有效降低了避让代价函数的误差;高邈等[7]提出了数据压缩算法,可解决使用大量数据描绘船舶领域的精度问题;熊勇等[8]基于船舶动力学和船舶运动控制理论,使用速度障碍法结合运动基元理论生成避让方向,使避让航线具有实用性。
综合其他学者的研究成果,本文用基于Coldwell船舶领域的危险识别参数代替传统dCPA等参数,改进碰撞危险度评估模型,比较原模型与改进后模型在多船会遇态势下的计算精度;结合转向避让角度和危险度评估模型提出一种考虑船舶航行目的地的多船会遇态势下的避让代价函数;使用VC+ + MFC实现船舶MMG运动模型,对四船会遇态势下的船舶决策进行仿真验证;比较仿真结果并分析所提出的避让代价函数的实用意义。
1 模型设计
1.1 Coldwell船舶领域
船舶领域用来描述船舶在保持安全航行状态下不受危险物侵犯的安全水域。图1为Coldwell船舶领域示意图,是通过对限制水域多船运动轨迹数据的拟合得到的近似几何图形。图1中:L为船长;领域长轴a通常取12L,领域短轴b通常取5L,可根据不同船舶类型或航行水域进行动态调整[9];在传统近似椭圆领域的基础上添加了短軸的偏移值Δb,通常取Δb=1.75L[10]。
1.2 碰撞危险度评估模型
本文基于文献[3]提出碰撞危险度评估模型。该模型考虑两船间dCPA、tCPA和决策至操舵所需时间,并相应赋予权重系数描述会遇态势下的海上能见度、水域种类等因素。在多船会遇态势下,将本船与各目标船之间的碰撞危险度累加便可得到多船碰撞危险度,其模型具体形式为r=a1dCPADS2+a2tCPATS2+a3DDS2-12
(1)式中:r表示船舶碰撞危险度;DS表示本船最小安全距离;TS表示决策至操舵所需时间;D表示当前时刻两船距离;a1、a2和a3为权重系数,取决于海上能见度、船舶尺寸(长度和宽度)和水域种类,通常取a1=a2=a3=1。权重系数在不同会遇态势下可取不同值:若会遇船舶处于海上能见度差或其他需要考虑以避让距离为主的态势下,可适量取a1>1,如a1=1.5或a1=2;若会遇船舶因船舶尺寸等而转向慢或灵活性差,处于需要考虑以避让时间为主的态势下,可适量取a2>1;若会遇船舶在狭水道等复杂水域航行,处于需要考虑以船舶间安全距离为主的态势下,可适量取a3>1。
1.3 改进碰撞危险度评估模型
图2中,虚线椭圆为船S1的船舶领域经f缩放因子放大至船S2刚好在领域边界时的船舶领域示意图。
首先明确基于船舶领域的危险识别参数的物理意义:f为把船舶领域长轴和短轴缩小或放大的比例,f(t)表示在t时刻将安全领域缩小或放大至目标船刚好处于领域边界时的f值,在图2中f(t)=Bb/b=Aa/a;fmin表示在两船保持当前状态航行的情景下,目标船距离本船最近时的f值;Tmin表示在两船保持当前状态航行的情景下,从当前时刻到目标船侵入本船领域所需的时间。本文用fmin表示dCPA/DS,用Tmin表示tCPA,用f(t)表示D/DS,用Rf表示碰撞危险度。fmin<1表示本船与目标船存在碰撞危险;fmin≥1表示两船不存在碰撞危险。综合可得
Rf=a1f2min+a2(Tmin/TS)2+a3 f2(t)-12
(2)
在实际应用中,当两船间的碰撞不可避免时可将碰撞危险度用1表示,当两船间不存在碰撞危险时可将碰撞危险度用0表示。也就是说,若两船间存在碰撞危险,只需本船减速或改向使Rf=0即可。综合可得Rf=min(Rf,1),fmin<1
0,fmin≥1
(3)1.4 领域参数表示
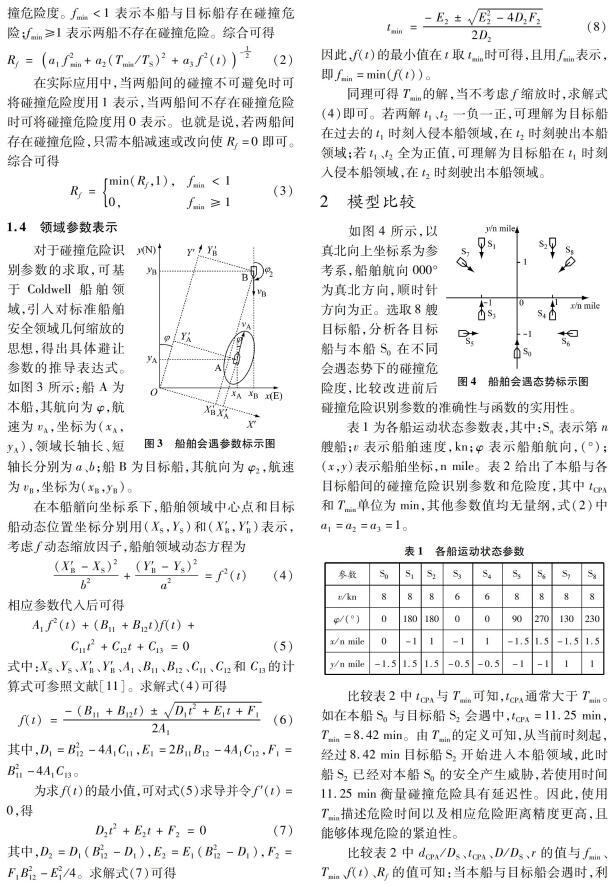
对于碰撞危险识别参数的求取,可基于Coldwell船舶领域,引入对标准船舶安全领域几何缩放的思想,得出具体避让参数的推导表达式。如图3所示:船A为本船,其航向为φ,航速为vA,坐标为(xA,yA),领域长轴长、短轴长分别为a、b;船B为目标船,其航向为φ2,航速为vB,坐标为(xB,yB)。
在本船艏向坐标系下,船舶领域中心点和目标船动态位置坐标分别用(XS,YS)和(X′ B,Y′ B)表示,考虑f动态缩放因子,船舶领域动态方程为(X′ B-XS)2b2+(Y′ B-YS)2a2=f2(t)
(4)相应参数代入后可得
A1f2(t)+(B11+B12t)f(t)+
C11t2+C12t+C13=0
(5)
式中:XS、YS、X′ B、Y′ B、A1、B11、B12、C11、C12和C13的计算式可参照文献[11]。求解式(4)可得
f(t)=-(B11+B12t)±D1t2+E1t+F12A1
(6)
其中,D1=B212-4A1C11,E1=2B11B12-4A1C12,F1=B211-4A1C13。
为求f(t)的最小值,可对式(5)求导并令f′(t)=0,得D2t2+E2t+F2=0
(7)其中,D2=D1(B212-D1),E2=E1(B212-D1),F2=F1B212-E21/4。求解式(7)可得tmin=-E2±E22-4D2F22D2
(8)因此,f(t)的最小值在t取tmin时可得,且用fmin表示,即fmin=min(f(t))。
同理可得Tmin的解,当不考虑f缩放时,求解式(4)即可。若两解t1、t2一负一正,可理解为目标船在过去的t1时刻入侵本船领域,在t2时刻驶出本船领域;若t1、t2全为正值,可理解为目标船在t1时刻入侵本船领域,在t2时刻驶出本船领域。
2 模型比较
如图4所示,以真北向上坐标系为参考系,船舶航向000°为真北方向,顺时针方向为正。选取8艘目标船,分析各目标船与本船S0在不同会遇态势下的碰撞危险度,比较改进前后碰撞危险识别参数的准确性与函数的实用性。
表1为各船运动状态参数表,其中:Sn表示第n艘船;v表示船舶速度,kn;φ表示船舶航向,(°);(x,y)表示船舶坐标,n mile。表2给出了本船与各目标船间的碰撞危险识别参数和危险度,其中tCPA和Tmin单位为min,其他参数值均无量纲,式(2)中a1=a2=a3=1。
比较表2中tCPA与Tmin可知,tCPA通常大于Tmin。如在本船S0与目标船S2会遇中,tCPA=11.25 min,Tmin=8.42 min。由Tmin的定义可知,从当前时刻起,经过8.42 min目标船S2开始进入本船领域,此时船S2已经对本船S0的安全产生威胁,若使用时间11.25 min衡量碰撞危险具有延迟性。因此,使用Tmin描述危险时间以及相应危险距离精度更高,且能够体现危险的紧迫性。
比较表2中dCPA/DS、tCPA、D/DS、r的值与fmin、Tmin、f(t)、Rf的值可知:当本船与目标船会遇时,利用dCPA/DS、tCPA、D/DS处理左右对称局面(如目标船S1、S2与本船S0形成的局面,目标船S3、S4与本船S0形成的局面),得到的危险度相同;利用fmin、Tmin、f(t)处理相同的左右对称局面,得到的危险度不同,且本船右方来船时的危险度大于左方来船時的危险度。比较r与Rf的值可知:r的最大值为0.074,最小值为0.023,变化梯度为0.051,对危险度的描述过于紧凑,变化不够明显;Rf的最大值为0.63,最小值为0,变化梯度为0.63,对危险度的描述更合理。由上可知改进后模型具有如下优势:在描述危险时间和危险距离方面精度更高;对右侧来船警惕性更强,体现了避碰规则的要求;其描述的危险度梯度变化明显,在实际应用中更容易观察。
3 仿真验证
3.1 MMG模型
本小节基于龙格-库塔(Runge-Kutta)法对船舶MMG运动方程求解,使用Visual Studio 2015 MFC编程实现仿真。龙格-库塔法目前广泛用于实际工程中,是具有高精度的显式或隐式迭代单步算法。本文选取经典四阶法(RK4)基于初值条件对船舶运动微分方程进行求解,简化计算过程。仿真实验中取步长0.5,取真北向上坐标系为参考坐标系,所取船舶运动微分方程如下:u ·=f1(u,v,r,δ,n)
v ·=f2(u,v,r,δ,n)
r ·=f3(u,v,r,δ,n)
Ψ ·=r
x ·=ucos Ψ-vsin Ψ
y ·=usin Ψ-vcos Ψ
n ·=(nE-n)/2
ξ ·=(ξE-ξ)/2.5
(9)式中:u、v分别为两坐标轴方向上的分速度;r为艏摇角速度;Ψ为船艏向;ξ为舵角;u ·、v ·、r ·、Ψ ·、ξ ·分别表示相应变量对时间的微分;nE和ξE分别表示主机额定转速和主机舵角;所涉及的其他变量的物理意义可参考文献[11-12]。船舶右旋回仿真如图5所示。
3.2 四船交叉会遇态势仿真
3.2.1 条件假设
本小节基于改进后的碰撞危险度评估模型,对四船交叉会遇态势进行决策仿真。仿真目的:验证改进后模型的危险辨识性,即在具体会遇态势下辨识最危险目标船的能力。船舶间存在碰撞危险的条件为Rf>0且两船距离d<3 n mile;两船间不存在碰撞危险的条件为Rf=0或两船距离d≥3 n mile。驶过让清后可根据船舶性能采取相应措施[13]航行至计划航线即可。仿真过程作如下假设:(1)船舶间选择协调避让;(2)已知目标船运动参数;(3)所有船舶能够通过建立通信等方式获取目标船决策信息。
3.2.2 实验结果
图6为船舶避碰决策流程,其中:Rf1,Rf2,…,Rfn表示本船与船i(i=1,2,…,n)间的碰撞危险度;δmin和δmax分别表示本船在具体会遇态势下可实施的最小和最大转向角,其中δmax由船舶性能决定;δ表示决策转向角;Δφ、Δφmin、Δφmax为计算中间变量;式(2)中,a1=a2=a3=1。
图7为四船协调避碰仿真图:共有A、B、C、D 4艘船,航行路线分别为A1—A2—A3、B1—B2—B3、C1—C2—C3和D1—D2—D3,运动起始点坐标分别为(-2,2)、(2,2)、(-2,-2)和(2,-2),单位为n mile,初始航向分别为135°、225°、45°和315°,其中真北方向为000°;4艘船航速均为8 kn,船长均取300 m;本船最小安全距离DS取1 n mile,决策至操舵所需时间TS取5 min。
基于改进前模型的船A在A0(船舶运动起始点)和A1位置所对应的危险识别参数和对船B、C、D的危险度辨识值见表3。基于改进后模型的船A在各位置的危险度辨别值和决策转向角见表4:如其中的0.178表示当船A处于A1位置、船B处于B1位置时,船B对船A的危险度辨识值;δ表示船A在各位置采取的转向角。
由实验设计可知,对于船A来说,船B与船C为空间对称船舶。由表3可知:船A在A0位置时,改进前模型对船B、船C的危险度辨识值均为0.17,对船D的危险度辨识值为0.14;船A在A1位置时,改进前模型对船B、船C的危险度辨识值均为0.23,对船D的危险度辨识值为0.19。因此,改进前的危险度评估模型在船A处于A0或A1位置时,能够区分出船B、船C的危险度高于船D,但不具有区分出船B与船C的危险度的能力,即不具有区分出空间对称船舶的危险度的能力。
由表4可知,船A在A0位置时:各船之间距离大于3 n mile,不需要采取避让措施;改进后模型对船B、船C的危险度辨识值分别为0.148和0.242,对船D的危险度辨识值为0.206,说明能够区分出空间对称船舶的危险度;船C危险度最大, 船B危险度最小,因而从空间分布看,改进后模型会优先考虑右侧来船。船A在A1位置时,改进后模型对船B、船C的危险度辨识值分别为0.178和0.284,最大碰撞危险来自船C,且此时A、C两船距离等于3 n mile,因此对船C采取避碰决策,操舵右转30°。船A在A2时,两船间碰撞危险度为0,可采取措施航行到计划航线。
总之,改进后模型具有区分空间对称船舶的危险度的能力,因而辨识性更高。改进后模型通过辨别左右来船危险度,对右侧来船警惕性更大,更符合避碰规则的要求。
4 结束语
本文通过引入Coldwell船舶领域的危险识别参数改进了碰撞危险度评估模型。通过比较得出,改进后模型对具体会遇态势危险度度量更精确。对具有对称性分布的四船交叉会遇态势的仿真结果表明,改进后模型具有识别运动参数相似的危险目标船的能力,辨识性更高,且对右侧来船警惕性更大,使避碰决策更具有安全性。改进后模型具有精度高、辨识性高的特点,更适用于复杂水域船舶航行的避碰决策和开阔水域的多船避碰决策,且可解决基于聚类算法对船舶会遇识别研究中会遇态势准确划分难的问题[14]。
参考文献:
[1] 吴兆麟. 无人驾驶船舶发展与航海教育对策[J]. 中国航海, 2017, 40(4): 99-103.
[2] COLDWELL T G. Marine traffic behavior in restricted waters[J]. The Journal of Navigation, 1983, 36(3): 431-444. DOI: 10.1017/S0373463300039783.
[3] LISOWSKI J. Determining the optimal ship trajectory in collision situation[C]. IX Midzynarodowa Konferencja Naukowo-Techniczna In z· ynieria Ruchu Morskiegoo, S'winouj s'cie, 2001, 1: 192-201.
[4] SZLAPCZYNSKI R. A unified measure of collision risk derived from the concept of ship domain[J]. The Journal of Navigation, 2006, 59(3): 447-490. DOI: 10.1017/S0373463306003833.
[5] SZLAPCZYNSKI R, SZLAPCZYNSKA J. A simulative comparison of ship domains and their polygonal approximations[J]. The International Journal on Marine Navigation and Safety of Sea Transportation, 2015, 9(1): 135-141. DOI: 10.12716/1001.09.01.17.
[6] 刘冬冬, 史国友, 李伟峰, 等. 基于最短避碰距离和碰撞危险度的避碰决策支持[J]. 上海海事大学学报, 2018, 39(1): 13-18. DOI: 10.13340/j.jsmu.2018.01.003.
[7] 高邈, 史国友, 李伟峰. 改进的Sliding Window在线船舶AIS轨迹数据压缩算法[J]. 交通运输工程学报, 2018, 18(3): 218-227. DOI: 10.3969/j.issn.1671-1637.2018.03.023.
[8] 熊勇, 贺益雄, 黄立文. 基于速度障碍的多船自动避碰控制方法[J]. 中国航海, 2015, 38(3): 46-51.
[9] 周丹, 郑中义. 基于小波分析的船舶领域与其影响因素变化关系[J]. 中国航海, 2017, 40(2): 56-59, 64.
[10] 邵哲平, 周田瑞, 潘家财, 等. 基于AIS数据挖掘的受限水域船舶动态领域研究[J]. 地球信息科学学报, 2018, 20(5): 564-570. DOI: 10.12082/dqxxkx.2018.180187.
[11] KIJIMA K, KATSUNO T, NAKIRI Y, et al. On the manoeuvring performance of a ship with the parameter of loading condition[J]. Journal of the Society of Naval Architects of Japan, 1990, 168: 141-148. DOI: 10.2534/jjasnaoe1968.1990.168_141.
[12] 朱军, 庞永杰, 徐玉如. 规则波浪中舰船操纵运动计算[J]. 哈尔滨工程大学学报, 2004, 25(1): 1-5.
[13] 高邈, 史国友, 李伟峰, 等. 基于改进遗传算法的岛礁区航路规划模型[J]. 上海海事大学学报, 2017, 38(3): 7-11. DOI: 10.13340 /j.jsmu.2017.03.002.
[14] 甄荣, RIVEIRO Maria, 金永兴. 一种基于DBSCAN的船舶会遇实时识别方法[J]. 上海海事大学学报, 2018, 39(1): 1-5. DOI: 10.13340/j.jsmu.2018.01.001.
(编辑 赵勉)
收稿日期: 2019- 03- 11 修回日期: 2019- 05- 10
基金項目: 国家自然科学基金(51579025);辽宁省自然科学基金(20170540090)
作者简介: 朱凯歌(1994—),男,安徽阜阳人,硕士研究生,研究方向为航海科学与技术,(E-mail)zkg@dlmu.edu.cn;
史国友(1968—),男,安徽桐城人,教授,博导,博士,研究方向为船舶智能避碰,(E-mail)sgydmu@dlmu.edu.cn