
机器视觉检测技术在汽车缺陷检测中的应用
2020-08-31 21:56王鑫谭思敏杨裕才
机电信息 2020年17期
关键词:机器视觉
王鑫 谭思敏 杨裕才
摘要:从机器视觉系统的工作原理与程序应用入手,以汽车外形检测作为研究对象,探讨了三维自动检测系统的工作原理、图像处理算法及其几何量测量的具体方法,为机器视觉系统的设计及其在汽车缺陷检测领域的应用奠定研究基础,提供可行的技术方案。
关键词:机器视觉;汽车外形;视觉定位;三维检测
0 引言
机器视觉是一门涵盖图像处理、人工智能等多个研究领域的交叉学科,机器视觉检测具有检测速度快、精度高、非接触性等特点,在外形检测、产品质量以及产品缺陷检测等领域具有良好的应用价值。将视觉定位与三维检测技术相结合,能够有效提升外观检测的便捷度与自动化水平,且检测精度与效率较高。
1 机器视觉检测技术在汽车外形缺陷检测中的设计思路
1.1 工作原理
机器视觉技术主要指利用机器模拟人眼的视觉功能,辅助完成检测和判断工作。机器视觉系统通常由图像采集、光学成像、机械运动、图像处理4个模块组成,其工作原理是利用CCD相机将检测对象实体转换为图像信号,在图像处理系统中结合RGB、HIS,将图像信号转换为数字信号,经由运算求解出信号的目标特征,再结合给定误差范围进行标准值比对,实现工业检测目标。
1.2 程序应用
1.2.1 样品图像采集
利用样品与照相机的相对运动,将样品置于高速CCD阵列照相机下方,利用光照箱发出的平行光源照亮样品,借助畸变小的光学镜头捕捉样品的三维场景图像,存储在计算机内构成二维图像,形成标准样品特征库。接下来移动照相机使其变换所处方位,在不同拍摄点进行样品的测量标定,求取均值计算出标定系数,借此有效消除因镜头畸变引发的测量误差,排除随机误差造成的干扰。该测量方法能够保障样品不同位置的光学参数与标定值相符,增强标定环节的精度与稳定性,为后续样品检测提供重要的参考依据。
1.2.2 工件图像抓拍控制
基于闭环控制方法获取高速运动工件的图像,保障抓拍到图像的完整度与精确度,为后续检测环节提供数据支撑。当传感器检测到被测物体的工位信息后,将相机指令发送至控制单元,控制相机快门完成图像曝光处理,再将图像分别放置在分割、定位单元,获得被测物体图像在坐标系中的位置以及被测物体图像与整幅图像中心的位置偏差,并将偏差数值反馈至控制单元处,由控制单元自动调整下一轮的相机拍摄时间,保障图像抓拍精度。
1.2.3 图像处理
基于手眼标定算法、OpenCV标定算法、IMU标定算法等多种算法进行图像的标定处理,结合线激光扫描获取工作区域的坐标数值,沿工作区域起点至终点进行图像轮廓的扫描处理,即可生成三维轮廓的点云数据,用于查看产品表面是否存在异物或部件有无缺失等。
1.2.4 图像特征比较
将检测得出的图像与标准样本特征库中的特征值进行比较,提炼出检测图像与标准样本间的区别,经由图像特征比较筛选出符合检测区域轮廓的轨迹,配合计算机程序与处理器实现三维自动检测。
2 机器视觉检测技术在汽车外形缺陷检测中的应用分析
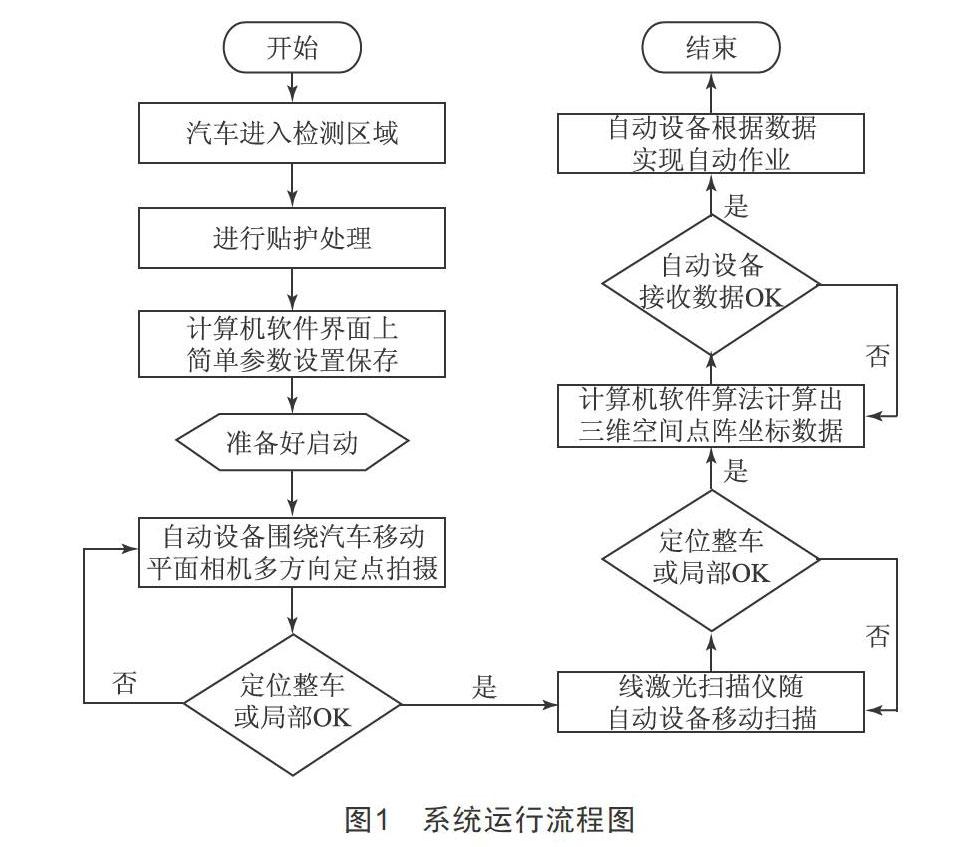
2.1 运行系统设计及流程
本文基于视觉定位技术设计了一款三维自动检测系统,系统运行流程如图1所示,适用于汽车外形检测。该系统采用机器人与激光扫描仪配合完成三维自动检测,系统硬件包含移动终端、处理器、ROM/RAM存储介质,由计算机将平面相机数据与线激光扫描仪数据传送至自动设备控制器中,结合程序指令控制机械的移动。将三维自动检测系统应用于车体外形检测中,可实现汽车车身钣金的整体或局部自动喷涂,检测目标具有多样化特征,能够节省大量仿形轨迹编程工序与设计成本、设计周期,有效提升工业自动化生产效率。
其检测流程为:检测前预处理,包含划定检测空间范围,围绕边缘设置移动机构,固定机器人随移动机构移动、选取2D相机和线激光扫描仪安装在机器人末端,将移动机构、机器人、控制柜进行电连接;将汽车驶入检测空间,完成工作区域与非工作区域的划分,分别在区域边界处设置反光层和黑色哑光层,并做好标记;选定若干个拍摄点,基于预定轨迹移动至各拍摄点,完成汽车外形的拍摄;针对拍摄的图像进行视觉处理,获得工作区域的位置数据,生成汽车外轮廓2D视觉图像,并结合标记算法计算出其在平面坐标系中的具体位置;根据工作区域位置确定起始点、终点,在由起始点向终点移动的过程中完成汽车外形轮廓的扫描处理,生成汽车三维轮廓的点云数据;将点云数据转换为位置数据,计算出汽车三维轮廓上各点的法相姿态数据,根据机器人轨迹参数X、Y方向的间距Nx、Ny生成汽车轮廓位置数据,经由坐标系排序后发送数据,待机器人接收到数据后自动生成运行轨迹,由系统控制车身进行自动喷涂处理。
2.2 图像处理算法
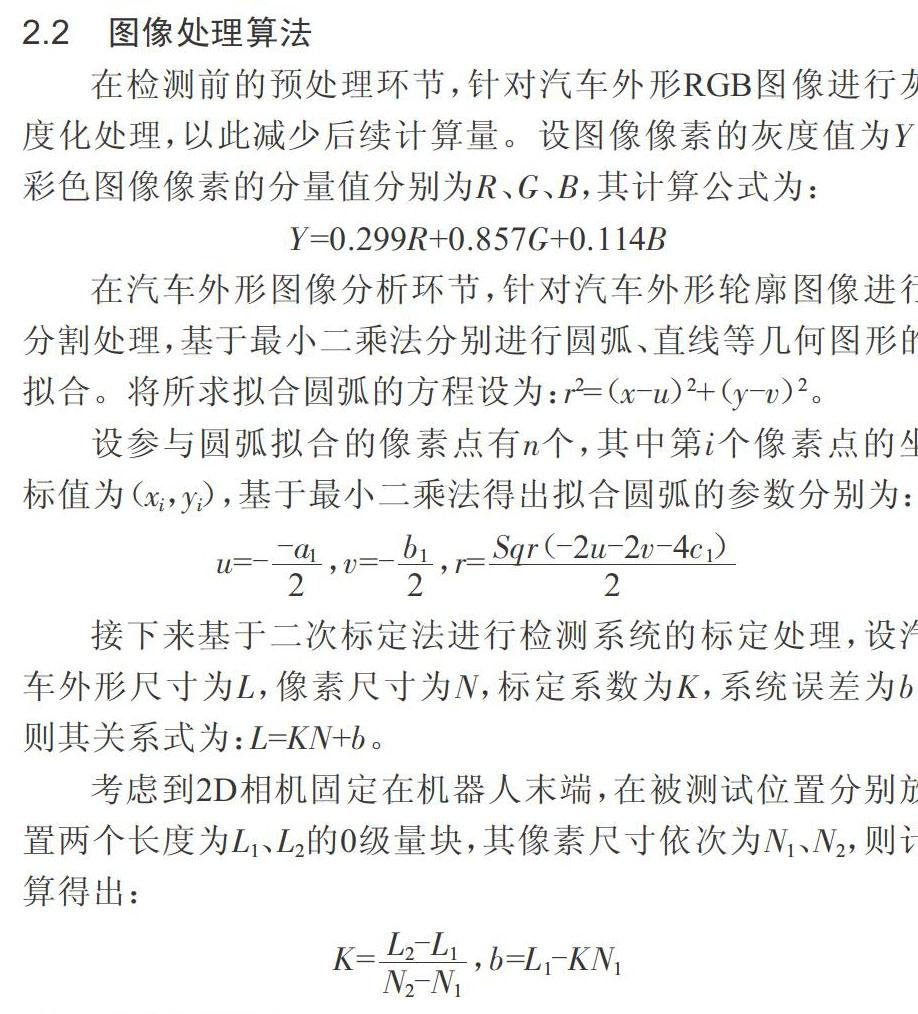
在检测前的预处理环节,针对汽车外形RGB图像进行灰度化处理,以此减少后续计算量。设图像像素的灰度值为Y,彩色图像像素的分量值分别为R、G、B,其计算公式为:
在汽车外形图像分析环节,针对汽车外形轮廓图像进行分割处理,基于最小二乘法分别进行圆弧、直线等几何图形的拟合。将所求拟合圆弧的方程设为:r2=(x-u)2+(y-v)2。
设参与圆弧拟合的像素点有n个,其中第i个像素点的坐标值为(xi,yi),基于最小二乘法得出拟合圆弧的参数分别为:
接下來基于二次标定法进行检测系统的标定处理,设汽车外形尺寸为L,像素尺寸为N,标定系数为K,系统误差为b,则其关系式为:L=KN+b。
考虑到2D相机固定在机器人末端,在被测试位置分别放置两个长度为L1、L2的0级量块,其像素尺寸依次为N1、N2,则计算得出:
2.3 几何量测量
通常为保证汽车车身钣金喷涂质量,需做好汽车车身尺寸的测量工作,基于最小二乘法获得圆弧半径为r,则直径的测量值为2r,车身各段长度即为其对应线段的长度,通过统计各线段上涵盖像素点的个数,即可获得车身的尺寸,在此基础上通过测量形位误差,保障其形状、位置精度达标。
3 结语
在“中国制造2025”战略目标的指导下,两化融合成为推动制造业转型升级的重要方式,进一步拓宽智能制造在制造业中的发展前景。在基于机器视觉技术进行三维自动检测系统设计时,还需密切关注系统在硬件与软件方面的性能优势,并加强对检测对象形状、摄像机安装位置的设计,以保障技术应用价值的充分发挥。
收稿日期:2020-06-07
作者简介:王鑫(1983—),男,河南信阳人,工程师,主要从事工业机器人研究和企业管理工作。
猜你喜欢
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年26期)2016-12-17
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
科技视界(2016年6期)2016-07-12
科技视界(2016年15期)2016-06-30
科技视界(2016年16期)2016-06-29
企业导报(2016年10期)2016-06-04
