
基于Arduino的多功能自动跟随行李箱设计
2020-08-31 14:40彭秋洁刘凯磊康绍鹏向承金刘佳帅况明鑫王海斌
物联网技术 2020年8期
彭秋洁 刘凯磊 康绍鹏 向承金 刘佳帅 况明鑫 王海斌

摘 要:根据消费者对跟随式行李箱的功能需求,分析了行李箱需要实现的功能有内部空间自适应变化、驱动轮自动收缩、拉杆自动弹出等,进而利用三维建模软件Solidworks对自动跟随行李箱的结构进行了设计。根据自动跟随行李箱的结构组成与工作原理,选用了Arduino单片机、电动推杆驱动器、电机驱动器、传感器等相关元器件,对控制系统的硬件进行设计。根据控制要求,对控制系统的软件进行了设计,并根据各个子模块进行了软件程序编写,最终实现了自动跟随行李箱的整体设计。从而为后续样机制作及试验调试提供了有力保障。
关键词:自动跟随;Arduino;跟随行李箱;三维建模;多功能;Solidworks
0 引 言
随着人们的生活水平不断提高,消费者对行李箱的需求也呈现出多样化的倾向,过去比较单一的使用方式已经不能满足人们的需求。
为了缓解旅客在拖拉行李箱时造成的疲劳,市场上出现了智能跟随式行李箱,许多学者对其进行了相关研究。文献[1-5]分别从优化设计、跟随系统、控制系统、传输系统等方面进行研究,取得了一定成果。然而,目前的跟随式行李箱相比传统行李箱由于增加了驱动系统、控制系统等,无疑减小了使用空间,增加了产品重量。这就使得跟随式行李箱的功能需要进一步完善,使其满足消费者的需求。
随着控制技术[6]、监控系统[7]、定位技术[8]等电子技术的飞速发展,尤其是结构简单、功能强大的Arduino开源单片机的发展[9],为跟随式行李箱的智能化设计提供了新的思路。因此,本文将对自动跟随行李箱的功能需求进行分析,并对行李箱的总体结构进行设计,使其满足相应的功能。根据自动跟随行李箱的结构特点,选用Arduino单片机作为主控制器,并采用相关元器件对行李箱控制系统的硬件和软件进行设计,从而完成自动跟随行李箱的整体设计。
1 自动跟随行李箱总体结构设计
1.1 功能需求分析
目前,自动跟随式行李箱由于采用了驱动机构和相关的电控元件,缩小了内部的使用空间。消费者行李较少时,需要的空间小,而行李较多时,需要更大的空间用以装载更多物品。因此,实现行李箱内部空间自动变化是一重要的功能需求。自动跟随式行李箱在运动过程中,尤其是在楼梯、电梯、人多、粗糙路面等不适宜“自动跟随”的场合,需要将驱动轮自动收缩,从而完成自动/手动切换;另外,行李箱的拉杆需要人力拉出,其自动化、智能化水平受到了一定限制。通过对自动跟随行李箱的功能需求进行分析可知,本设计需要实现的功能有内部空间自适应变化、自动/手动自由切换、拉杆自动弹出等。
1.2 结构组成及工作原理
利用三维建模软件Solidworks对多功能自动跟随式行李箱的结构进行设计。如图1所示为自动跟随行李箱的总体结构三维示意图,与普通行李箱的外观类似,同样拥有拉杆、密码锁、行李箱本体、万向轮等;此外,在行李箱本体上端的四个面装有四个红外传感器,通过四个红外传感器可以检测操作者的操作状态。
内部空间自适应变化结构示意图如图2所示。将行李箱本体分为上箱体和下箱体两个部分,上箱体的外形呈U字型,并内嵌于下箱体,利用两个空间电动推杆将上箱体和下箱体连接,根据实时需求,驱动电动推杆的伸缩可以实现上箱体在下箱体内部滑动,从而实现箱体内部使用空间的自适应变化。另外,在上箱体和下箱体上利用合页设计了可以随之活动的上箱门和下箱门,上箱门同样内嵌于下箱门,并且可以同时打开和关闭。
驱动轮自动收缩结构示意图如图3所示。利用两个驱动电机分别带动两个驱动轮进行驱动,驱动电机通过安装支架固定于活动板上,活动板和行李箱的底部通过收缩电动推杆连接。因此,驱动轮可以通过收缩电动推杆的伸出与缩回实现其在行李箱的底部上下移动。
拉杆自动弹出结构示意图如图4所示。笔式电动推杆的一端固定于上箱体,另一端通过销轴与拉杆的底端相连,拉杆在上箱体内通过笔式电动推杆的伸出与收缩可以实现自动弹出与复位功能。
2 控制系统硬件设计
根据自动跟随式行李箱的机械结构组成和工作原理,对控制系统的硬件进行设计,其结构框图如图5所示。采用Arduino UNO R3作为主控制器,通过电机驱动器分别控制两个直流电机,并通过编码器将转速反馈给控制器,从而实现驱动轮的闭环反馈控制;同时,通过电动推杆驱动器分别控制空间电动推杆、收缩电动推杆和笔式电动推杆,并通过行程开关进行反馈控制。另外,在行李箱上配备报警装置、显示装置等。输入装置包括遥控器、红外传感器、避障传感器、操作按钮以及4G网络通信接口等。整个硬件系统的电源模块采用锂电池进行供电,并配备5 V/1 A、24 V/10 A的电源接口。
3 控制系统软件设计
3.1 软件总体设计
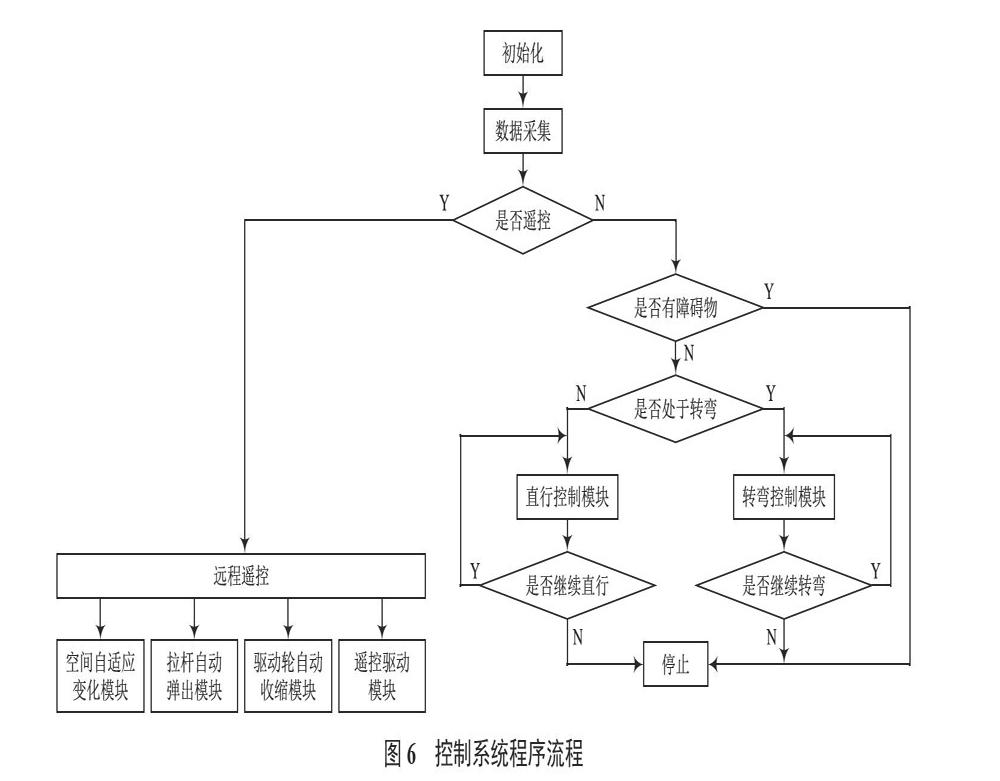
在对控制系统的硬件设计完成以后,需要对控制系统的软件进行设计,并编写相应程序,方可完成指定功能。控制系统的程序流程图如图6所示。其主要流程如下。
(1)程序初始化。
(2)数据采集,包括所有传感器信号、操作按钮、4G网络通信接口信号等,如有异常,则利用报警装置进行报警。
(3)判断是否为遥控状态,如果为遥控状态,则可以通过遥控器完成空间自适应变化、拉杆自动弹出、驱动轮自动收缩、遥控驱动等功能;如果为自动状态,则进入到自动模式。
(4)进入自动模式后,首先判断前方是否有障碍物,如果有障碍物,则停止运行;如果没有障碍物则进入自动跟随运行模式。通過红外传感器检测操作者是直行还是转弯,如果是直行,则进入直行状态;如果是转弯,则进入转弯状态。
3.2 软件程序设计
根据控制系统程序流程图及控制要求,采用与Arduino UNO R3单片机开发板对应的Arduino IDE 编程软件进行编程,编程界面如图7所示。软件编程分别编写遥控器控制模块、自动跟随运行模块、空间自适应变化模块、拉杆自动弹出模块、驱动自动收缩模块和遥控驱动模块等。
3.3 自动跟随运行模块设计
在软件程序设计过程中,自动跟随运行模块由于用到了闭环反馈控制,相对较难,本文主要详述此模块。图8为驱动轮自动跟随运行控制原理方框图。从图中可以看出,其分为自动跟随前进控制模块和自动转弯控制模块。
(1)自动跟随前进控制模塊。根据带测距功能的红外传感器,获得不同时刻操作者与行李箱之间的系列位移值,并将此系列位移值S1与固定时间值Δt1作比,从而获得操作者的行驶速度。将其作为行李箱的目标直线速度,同时采用同步驱动,根据式(1)可计算左驱动轮和右驱动轮的目标直线转速n1:
式中:n1为目标直线转速;S1为前进模式下操作者与行李箱之间的系列位移值;Δt1为前进模式下时间段;R为车轮半径。
将目标直线转速与左驱动轮转速编码器检测到的实际转速作差,经过PID运算后,通过PWM信号输出给左驱动轮电机,带动左驱动轮;将目标直线转速与右驱动轮转速传感器检测到的实际转速作差,经过PID运算后,通过PWM信号输出给右驱动轮电机,带动右驱动轮。从而左、右驱动轮形成同步反馈控制。
(2)自动转弯控制模块。同样根据转弯信号的红外传感器,获得不同时刻操作者与行李箱之间的系列位移值S2,并将此系列位移值与固定时间值Δt2作比,从而获得操作者的转弯信号强度,根据式(2)将转弯信号强度转换为目标转弯转速n2:
式中:n2为左驱动轮电机或右驱动轮电机的检测目标转速;S2为转弯模式下操作者与行李箱之间的系列位移值;Δt2为转弯模式下时间段。
若进入左转弯模式,控制器向左驱动轮电机输入停止信号,左驱动轮被迫停止,并将目标转弯转速n2与右驱动轮编码器检测到的实际转速作差。经过专家PID运算后,通过PWM信号输出给右驱动轮电机,带动右驱动轮。因此,左驱动轮停止,右驱动轮转动,形成差速左转向,完成左转弯动作。进入右转弯模式原理与进入左转弯模式相同,所不同的是右驱动轮停止,左驱动轮转动,形成差速右转向,完成右转弯动作。
4 结 语
在对自动跟随行李箱的功能需求进行分析后,对行李箱的总体结构进行了设计,使其可以实现内部空间自适应变化、驱动轮自动收缩、拉杆自动弹出等多种功能。根据自动跟随行李箱的结构组成与工作原理,选用Arduino单片机、电动推杆驱动器、电机驱动器、传感器等相关元器件,对控制系统的硬件进行了设计。根据控制要求,对控制系统的软件进行了设计,并根据各个子模块进行了软件程序编写。最终实现了自动跟随行李箱的整体设计,从而为后续样机制作及试验调试提供了有力保障。
参考文献
[1]叶伟慧,舒秀兰,林桂盛,等.多模式可载儿童智能行李箱装置优化设计[J].智能计算机与应用,2019,9(1):127-130.
[2]张丰,李顺霖,陈仁,等.基于自动跟随系统的智能行李箱[J].智能计算机与应用,2019,9(3):163-165.
[3]申耀武,吴进程,徐亦昌,等.基于单片机控制的智能行李箱设计研究[J]. 自动化与智能化,2019,48(7):114-116.
[4]赵艳妮,马顺,张书源,等.基于视觉传感器的自动跟随行李箱设计[J].智能城市,2017(8):23-24.
[5]丁世豪,李光顺,刘鹏坤,等.基于蓝牙4.0的自动跟踪智能行李箱设计[J]. 电子技术,2018,47(5):47-49.
[6]陈文康.基于单片机的直流电机调速系统设计探讨[J].电脑编程技巧与维护,2018(10):53-54.
[7]陶冶.基于Arduino和WiFi的温室监控系统[J].物联网技术,2019,9(3):23-26.
[8]蔡磊,周亭亭,郭云鹏,等.基于超声波定位的智能跟随小车[J].电子测量技术,2013,36(11):76-79.
[9]曾金,雷建云.基于Arduino的果园基地环境Web监测系统设计[J].物联网技术,2016,6(8):60-61.
[10]汉俊梅,郑艳,张锦枫.轮罩翻边机变频器定位和跟随控制系统的研究[J].汽车工艺与材料,2015(11):67-72.
猜你喜欢
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
科学与财富(2016年15期)2016-11-24
知音励志·社科版(2016年8期)2016-11-05
家庭科学·新健康(2016年9期)2016-10-25
