
织物传感智能腿套的肌电信号拟合性能研究
2020-08-31 14:44张佳慧王建萍
丝绸 2020年8期
关键词:电极
张佳慧 王建萍
摘要: 为进一步开发智能服装新的个性化功能,文章选用镀银锦纶纱作为织物传感材料并设计4种电极部位组织和尺寸制作16款智能腿套,同步采集4种运动状态下穿戴智能腿套试样与Ag/AgCl凝胶电极的小腿腓肠肌表面肌电信号,采用时域、频域和相关函数分析方法得到各试样的肌电信号拟合性能评价结果。结果表明:静态下,智能腿套电极尺寸过大或过小都易出现信号异变;动态下,智能腿套肌电拟合性能较优的圆形电极部位添纱组织为1×1抽条、1×2抽条组织,较优添纱尺寸为16纵行×32横列。
关键词: 智能腿套;织物传感;表面肌电信号;拟合性能;电极
Abstract: In order to further develop the new individualized function of smart garments, silver-plated nylon yarn was used as the fabric sensing material, and 4 structures and 4 sizes of electrodes were designed to make 16 kinds of smart leggings. The sEMG signal of calf gastrocnemius muscles worn by smart leggings and Ag/AgCl electrodes were simultaneously collected in 4 motion states. And sEMG signal fitting performance of each sample was evaluated by time domain, frequency domain and correlation function analysis. The results showed that too large or too small electrode size of smart leggings might cause abnormal sEMG signal change under static state. Under the dynamic condition, the smart leggings with 1×1 rib and 1×2 rib circular electrode structures and 16 vertical rows ×32 horizontal rows had better fitting performance.
Key words: smart legging; fabric sensing; sEMG signal; fitting performance; electrode
在消费需求升级的大环境下,人们开始更多地关注健康并利用最新的智能技术监测生理信号。智能服装因其可对人体生理活动信息及外部环境信息进行长期、动态且“人体无意识”监测的特点而广受青睐。近年来,可用于实时监护的智能运动服装已陆续研发,其中疾病预防和运动管理成为主要的流行趋势。在基础生理监测方面,智能服装可采集人体温湿度[1-2]、心率[3]、呼吸频率[4]及血压血氧[5]等生理参数,不仅实现消费者对自我健康状况的了解,也满足了病人的更好监护。在运动方面,目前智能运动服已具备步态[6]和动作监测[7]并给以运动姿势调整建议的功能,但仍旧无法满足日益增长的消费需求。据美国可穿戴市场调研的报告指出,50%消费者难以对智能服装形成依赖性[8],因此进一步研发智能服装的新功能对突破产业化瓶颈尤为重要。
表面肌电技术由于具有无创性、时效性[9]被运动神经领域广泛应用。在运动中,实施监测人体表面肌电信号可预测肌肉疲劳而避免过度训练,更有助于调整运动姿势养成良好的运动习惯。但由于人体表面肌电信号是一种非常微弱、不稳定且易受外界干扰的信号,故对研发的智能产品电极采集肌电信号的精确性要求较高。本文选用镀银导电纱作为织物传感材料,设计4种圆形电极尺寸和添纱组织制作织物传感智能腿套,并采集静坐、站立、行走和慢跑4个状态下的肌电信号。通过时域、频域和相关函数分析以评价并对比电极部位不同组织结构和尺寸的智能腿套试样的肌电信号拟合性能,为肌电信号采集用智能运动腿套产业化生产提供理论参考,对智能服装多领域多功能发展起到积极的促进作用。
1 试 验
1.1 对 象
选择年龄(23.4±1.3)岁,身高(165±4.9) cm,体重(532±6.4) kg且身体健康、下肢骨骼肌指标正常,无小腿肌肉劳损病史,试验前24 h均无参加任何剧烈活动的2名男性和3名女性作为试验对象,受试者基本数据如表1所示。经Inbody人体成分仪检测受试者四肢骨骼肌及水分含量均在正常范围内,试验前对受试者进行试验动作培训以了解试验内容,并要求受试者下身穿着较为宽松的运动短裤。
1.2 材料及仪器
纱線:面纱及扎口线均选用78 dtex/2黑色锦纶纱(东方桂冠针纺织品有限公司),地纱选用44 dtex/44 dtex/44 dtex黑色锦包/氨纶双包纱、衬垫选用311 dtex/44 dtex/44 dtex黑色锦包/氨纶双包纱(上海利以德特种丝有限公司),导电纱线选用222 dtex镀银锦纶纱(青岛志远翔宇功能性面料有限公司)。
设备与仪器:Goal 615 D型袜机,针筒直径3.75英寸、144针(圣东尼上海针织机械有限公司),DTS 2223CN型无线表面肌电采集系统(Noraxon USA Inc),Horizon 832T型跑步机(乔山健康科技有限公司)。
其他材料:金属扣、Ag/AgCl凝胶电极贴片、脱毛膏、酒精棉片、记号笔、剪刀及医用胶带(市售)。
1.3 方 案
1.3.1 采集点选取
小腿肌肉数量较多,按照肌群位置可分为前群、后群和外侧群,在运动过程中最常用到的肌肉是胫骨前肌、腓肠肌和比目鱼肌,且小腿三头肌(即腓肠肌和比目鱼肌)最易在运动和日常活动中受损[10],占小腿所有肌群受损的90%以上[11],同时腓肠肌痉挛是最常见的痛性肌肉痉挛。因此,选择右腿小腿外侧腓肠肌作为肌电信号的采集点。
1.3.2 表面肌电采集
试验环境设定参照文献[12-13],跑步最适宜的相对湿度为50%~60%,故试验在(25±1) ℃、(50±2)%RH的安静舒适环境中进行。为避免自身生理原因对试验造成干扰,受试者提前30 min适应试验环境以保证皮肤汗液含量和温度相对恒定。
试验前对采集部位脱毛处理并使用酒精棉片反复擦拭以减少皮肤阻抗,依照腓肠肌纤维方向贴两片Ag/AgCl凝胶电极片,中心距设置为31 mm(与智能腿套电极部位中心距相同),连接Noraxon DTS肌电传感器并使用医用胶带固定。穿戴织物传感智能腿套,使其电极部位位于腓肠肌中部同时与皮肤充分接触,连接Noraxon DTS肌电传感器并用医用胶带固定于智能腿套外侧,将信号采样频率设置为1 500 Hz标记智能腿套穿戴位置和胶带长度,以保证每次测量时穿戴位置和皮肤压力相同。
由于肌电信号具有较大随机性,试验同步采集静坐、站立、行走和慢跑4种运动状态下受试者佩戴Ag/AgCl凝胶电极和智能腿套试样的肌电信号,其中行走与慢跑状态在跑步机上进行,分别设置速度为3 km/h和5 km/h。观察受试者表面肌电图,待波形稳定后采集受试者静坐、站立各40 s,行走、慢跑各60 s的表面肌电信号;更换一次试样,休息5 min再进行相同测试。
1.3.3 肌电信号拟合性能评价
从时域和频域两方面分析肌电信号是最早也是生物医学和运动学领域最广泛的分析方法[14],目前已用于织物电极信号采集性能的分析[15-16]。
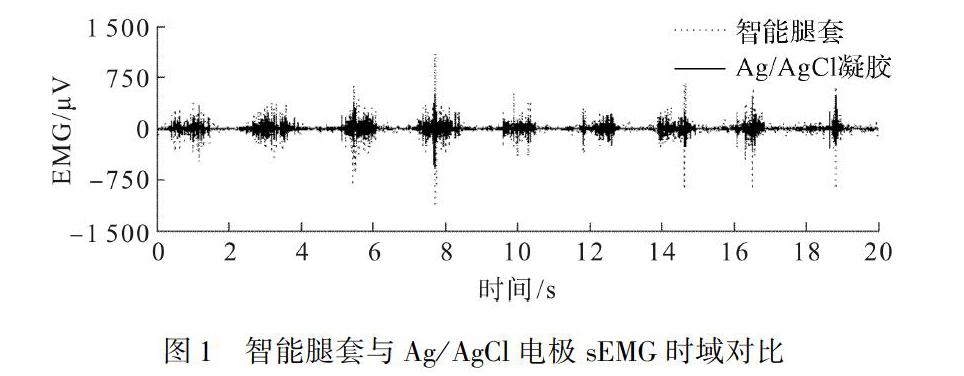
时域分析是采集的腓肠肌电信号随时间变化的特征,绘制肌电信号的时域对比图(图1),同时提取指标均方根值RMS。RMS是肌电信号在一定运动时段内的有效振幅,定义式为:
式中:N为采样点个数;Xi为采样点的肌电信号幅值。
频域分析反映肌电信号随信号频率的变化情况,绘制试样与Ag/AgCl凝胶电极的EMG频域对比图(图2),提取指标中值频率MF。MF是肌电时域信号功率谱图面积中值所对应的频率值,定义式为:
式中:PSD(f)为功率谱密度函数。
即使两个具有相同时域和频域特征的随机信号,也依旧难以判定两者间的变化规律是否具有一致性[17],故须采用相关函数进一步分析同步采集的智能腿套电极与Ag/AgCl凝胶电极肌电信号变化趋势是否一致,提取Pearson相关系数和相应的显著性指標以反映两随机变量在不同相对位置的相互匹配程度。Pearson相关系数定义为:
式中:N为采样点个数;μ为均值;σ为标准差。
2 讨论与分析
2.1 智能腿套工艺设计
智能腿套款式及工艺设计采用Photon绘图软件和QuasarL编程软件,并用SANTONI Goal 615 D型袜机完成试样制作。
2.1.1 规格参数设计
腿套每转144针,其他规格参数设定如表2所示。
2.1.2 电极组织结构及尺寸设计
腿套的主体组织采用衬垫平针组织,上罗口采用双层衬垫平针组织,下罗口采用双层衬纬罗纹组织;电极部位分别选用平纹、1×1抽条、1×2抽条、毛圈组织进行添纱;同时由于方形织物电极存在边缘效应[18],试验设计4种圆形电极尺寸,纵行×横列数分别设计为12×24、16×32、20×40、24×48。
2.1.3 纱线配置
纱线的穿纱方式如表3所示。
2.1.4 试样编织及后整理
图3为下机后的智能腿套试样示意,图3中电极尺寸均为16×32,分别为平纹组织(图3(a))、1×1抽条组织(图3(b))、1×2抽条组织(图3(c))、毛圈(图3(d))组织。
下机后试样需进一步套在标准腿模上进行热定型整理,并在电极中心位置用导电纱缝上金属扣,下机及热定型后电极部位的工艺参数见表4,其中横密为每5 cm的纵行数、纵密为每5 cm的横列数。共制作智能腿套试样16种,依次编号(表5)。
2.2 静态肌电信号拟合性能分析
将同步采集的智能腿套和Ag/AgCl凝胶电极的肌电数据导入Matlab软件,截取静坐和站立状态下的稳定肌电信号各10 s,采用1.3.3中时域评价方法处理信号,并用Origin 9.0绘制静态肌电信号RMS统计图,结果如图4所示。
观察肌电信号时域图像可知,静坐与站立状态下所有智能腿套采集的肌电信号稳定性较好无明显波动。Ag/AgCl电极采集的肌电信号其站立状态下的均方根值RMS高于静坐状态,是由于静坐状态下小腿腓肠肌处于放松状态,站立后肌肉收缩,而1#、4#、5#、8#、15#和16#的静态肌电信号有所变异,站立状态的肌电信号幅值未高于静态肌电信号,其余试样与Ag/AgCl电极采集的静态肌电信号RMS较为接近。因此,静态肌电拟合性能较好的腿套试样编号为2#、3#、6#、7#、9#~14#,智能腿套电极尺寸设置过大或过小都将影响其静态肌电信号采集效果。
2.3 动态肌电信号拟合性能分析
使用Matlab软件截取行走状态和慢跑状态下的稳定肌电信号各20 s,根据1.3.3肌电信号拟合性能评价方法观察动态肌电信号的时域、频域对比图,并提取时域RMS、频域MF,以及相关系数r和对应的显著性p指标。
2.3.1 时域分析
采用Origin 9.0绘制动态肌电信号RMS统计图(图5),各试样RMS提取结果均为5名受试者的肌电信号RMS均值。慢跑时的智能腿套与Ag/AgCl凝胶电极采集的时域指标数据均高于行走状态且幅值有明显变化,因此智能腿套电极可以区分小腿的不同运动状态,4#和16#试样未采集到肌电信号,是由电极尺寸较大和满添纱工艺造成的正负织物电极接触导致。通过观察动态肌电信号时域对比图可知,5#~12#智能腿套在行走和慢跑状态下采集到的肌电信号幅值与普通凝胶电极较为接近且趋势一致性较好,但幅值普遍偏高,其中5#、9#~12#智能腿套在行走状态下肌电信号受到部分干扰。因此从时域分析结果来看,6#~8#(1×1抽条)智能腿套采集的肌电信号较为理想。
2.3.2 频域分析
频域指标中值频率MF统计图如图6所示,各试样MF提取结果均为5名受试者的肌电信号MF均值。5#~12#,即1×1抽条和1×2抽条组织的智能腿套电极与Ag/AgCl凝胶电极采集的肌电信号中值频率MF更为接近,且在慢跑状态的肌电信号中值频率均明显高于行走状态。通过频谱图像分析可以发现,3#及5#~12#的Welch功率谱密度与普通电极变化趋势一致较好。
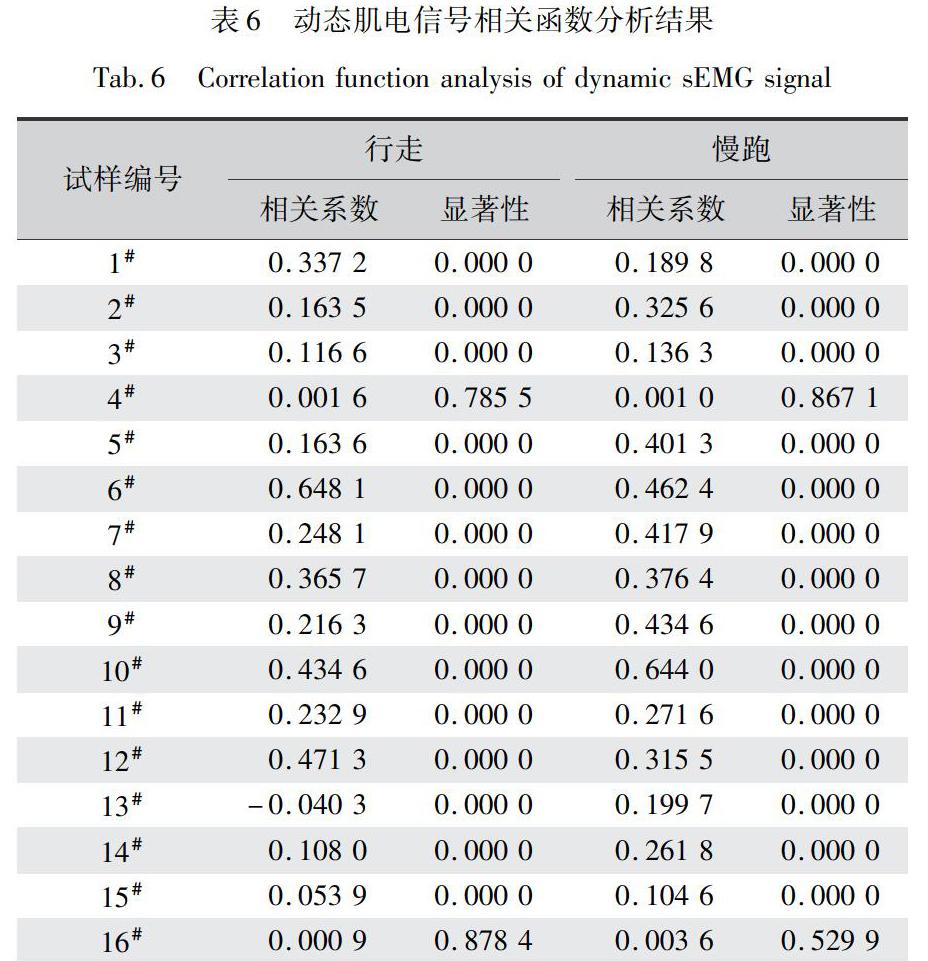
2.3.3 相关函数分析
使用Matlab提取两随机变量函数的Pearson相关系数r和显著性p以反映不同时刻点随机变量之间的内在联系,结果如表6所示。
由表6可知,除4#与16#试样外其余智能腿套电极与普通凝胶电极的显著性均小于显著性水平0.05,故认为相关性显著。1×1抽条和1×2抽条组织(5#~12#)的智能腿套与Ag/AgCl凝胶电极的相关系数优于平纹(1#~4#)与毛圈(13#~16#)组织,故作为肌电信号采集试验的纬编织物电极应选用抽条组织作为导电纱的添纱组织。
其中,6#和10#试样行走和慢跑状态下相关系数均高于045为实相关,因此智能腿套试样添纱尺寸最佳为16×32(纵行×横列数)。6#试样与普通电极行走状态相关系数更是高达0.648 1,呈显著相关,肌电信号拟合效果好。
3 结 论
本文选用222 dtex镀银锦纶纱作为织物传感材料,设计4种电极部位组织和尺寸制作智能腿套试样,同步采集4种状态下穿戴智能腿套试样与Ag/AgCl凝胶电极的小腿腓肠肌表面肌电信号,通过时域、频域和相关函数分析评价各试样的肌电信号拟合性能,为肌电信号采集用智能运动腿套产业化生产提供理论参考,促进智能服装向多领域发展以满足消费者的不同需求。通过试验与分析得到以下结论:
1)静坐与站立状态(静态)下所有智能腿套采集的肌电信号稳定性较好无明显波动,但智能腿套电极尺寸设置过大或过小都易出现静态肌电信号异变,影响其静态肌电信号采集效果。
2)行走和慢跑状态(动态)下,除4#和16#外其余智能腿套试样均能检测到肌电信号。综合时域、频域和相关函数分析结果可知,5#~12#即1×1抽条和1×2抽条組织智能腿套的肌电拟合性能明显优于平纹(1#~4#)与毛圈(13#~16#)组织,且智能腿套的圆形电极部位最佳添纱尺寸为16纵行×32横列,6#和10#试样与Ag/AgCl电极相关系数均高于0.45,其中6#试样行走状态相关系数高达0.648 1。故认为6#(1×1抽条组织、16纵行×32横列)智能腿套试样的肌电拟合性能较优。
参考文献:
[1]PANG C, LEE G Y, KIM T I, et al. A flexible and highly sensitive strain-gauge sensor using reversible interlocking of nanofibres[J]. Nature Materials, 2012, 11(9): 795.
[2]罗沛, 丁济亮, 许伟刚, 等. 住院病人健康状态实时智能监护服的开发[J]. 上海纺织科技, 2017(1): 8-11.
LUO Pei, DING Jiliang, XU Weigang, et al. Development of real-time intelligent monitoring uniform for inpatients health status[J]. Shanghai Textile Technology, 2017(1): 8-11.
[3]齐晓晓, 周捷, 张辉. 孕妇心电监护可穿戴装备的研究现状与发展趋势[J]. 丝绸, 2018, 55(12): 57-62.
QI Xiaoxiao, ZHOU Jie, ZHANG Hui. Research status and development trend of wearable electrocardiogram monitoring equipment for pregnant women[J]. Journal of Silk, 2018, 55(12): 57-62.
[4]LI Mufang, LI Haiying, ZHONG Weibing, et al. Stretchable conductive polypyrrole/polyurethane(PPy/PU) strain sensor with netlike microcracks for human breath detection[J]. ACS Applied Materials & Interfaces, 2014, 6(2): 1313-1319.
[5]BINGGER P, ZENS M, WOIAS P. Highly flexible capacitive strain gauge for continuous long-term blood pressure monitoring[J]. Biomedical Microdevices, 2012, 14(3): 573-581.
[6]谢珩, 陈国壮, 郑镒丹, 等. 基于薄膜传感器的智能鞋垫设计[J]. 电子测量技术, 2018, 41(21): 119-122.
XIE Heng, CHEN Guozhuang, ZHENG Yidan, et al. Intelligent insole design based on thin film sensor[J]. Electronic Measurement Technology, 2018, 41(21): 119-122.
[7]谢娟. 针织物传感器双向延伸电:力学性能及肢体动作监测研究[D]. 上海: 东华大学, 2015.
XIE Juan. Research into Electro: Mechanical Properties of Knitted Sensor Under Strip Biaxial Elongation and Application in Monitoring Body Movements[D]. Shanghai: Donghua University, 2015.
[8]海川. 智能穿戴设备爆发[J]. 新经济导刊, 2014(S1): 42-45.
HAI Chuan. Explosion of intelligent wearable devices[J]. New Economy Weekly, 2014(S1): 42-45.
[9]王健, 金小刚. 表面肌电信号分析及其应用研究[J]. 中国体育科技, 2000, 36(8): 26-28.
WANG Jian, JIN Xiaogang. sEMG signal analysis method and its application research[J]. China Sport Science and Technology, 2000, 36(8): 26-28.
[10]DELGADO G J, CHUNG C B, LEKTRAKUL N, et al. Tennis leg: clinical US study of 141 patients and anatomic investigation of four cadavers with MR imaging and US[J]. Radiology, 2002, 224(1): 112-119.
[11]ELKHOURY G Y, BRANDSER E A, KATHOL M H, et al. Imaging of muscle injuries[J]. Skeletal Radiology, 1996, 25(1): 3-11.
[12]陆大江, 沈逸蕾. 健身房运动环境的研究与分析[J]. 体育与科学, 2012, 33(3): 9-17.
LU Dajiang, SHEN Yilei. Research and analysis of body: building environment of gymnasium[J]. Journal of Sports and Science, 2012, 33(3): 9-17.
[13]李梦园. 影响女子运动着装疲劳性相关因子与疲劳阈值研究[D]. 杭州: 浙江理工大学, 2016.
LI Mengyuan. Affect Womens Sports Dress Fatigue Related Factor and the Fatigue Threshold Value Research[D]. Hangzhou: Zhejiang Sci-Tech University, 2016.
[14]WEBBER C J, SCHMIDT M A, WALSH J M. Influence of isometric loading on biceps EMG dynamics as assessed by linear and nonlinear tools[J]. Journal of Applied Physiology, 1995, 78(3): 814.
[15]劉振, 刘晓霞. 织物电极采集肌电信号的研究进展[J]. 棉纺织技术, 2017, 45(1): 80-84.
LIU Zhen, LIU Xiaoxia. Research progress of myoelectric signal collecting with fabric electrode[J]. Cotton Textile Technology, 2017, 45(1): 80-84.
[16]MINJAE K, TAEWAN K, KIM D S, et al. Curved microneedle array-based sEMG Electrode for robust long-term measurements and high selectivity[J]. Sensors, 2015, 15(7): 16265-16280.
[17]李正周. Matlab数字信号处理与应用[M]. 北京: 清华大学出版社, 2008.
LI Zhengzhou. Matlab Digital Signal Processing and Application[M]. Beijing: Tsinghua University Press, 2008.
[18]KRASTEVA V T, PAPAZOV S P. Estimation of current density distribution under electrodes for external defibrillation[J]. BioMedical Engineering OnLine, 2002, 1: 7.
猜你喜欢
现代职业教育·高职高专(2020年11期)2020-02-04
高考·中(2019年6期)2019-09-10
智能制造(2018年5期)2018-12-11
分析化学(2018年12期)2018-01-22
都市家教·上半月(2017年6期)2017-06-26
中学物理·高中(2016年12期)2017-04-22
中学生数理化·高二版(2016年12期)2017-02-28
科技创新导报(2016年5期)2016-05-14
分析化学(2014年7期)2014-12-13
中学生数理化·高二版(2008年1期)2008-10-19
