基于Sentinel-2A 数据的森林覆盖变化研究
2020-08-31 05:01杨振兴卢海燕
中南林业科技大学学报 2020年8期
杨振兴 ,文 哲 ,张 贵 ,周 璀 ,卢海燕
(1. 中南林业科技大学 林学院,湖南 长沙 410004;2. 湖南壶瓶山国家级自然保护区管理局,湖南 常德 415300;3. 湖南应用技术学院 农林科技学院,湖南 常德 415000)
森林不仅为人类提供丰富的资源,同时作为生态环境的重要组成部分,对世界的发展意义重大[1]。随着人类活动和社会发展,森林资源大幅减少,快速准确地获取森林覆盖变化信息十分重要。对比耗时费力的传统人工调查方法,遥感技术因快速、高效、范围广的优势在森林覆盖变化监测领域越来越被人们所重视[2-3]。
目前已经有不少学者运用遥感技术对地物分类和森林覆盖变化进行了研究。李世波等[4]利用PCA 算法对高光谱数据进行降维后,运用不同分类方法对东洞庭湖湿地植被进行分类识别。谢敏等[5]利用高分一号和资源三号卫星影像作为研究数据源,对陕西省镇巴县进行林地资源动态变化研究。李和顺等[6]、代玉丽[7]采用NDVI 差值法对森林覆盖变化进行监测。Derose 等[8]、张连华等[9]采用对遥感影像构建扰动指数的方法来监测森林变化。韩婷婷等[10]、刘丹等[11]采用决策树分类的方法进行森林地物分类识别。这些研究都取得了较好的结果,充分体现了遥感技术在地物分类和森林覆盖变化监测方面的优势。但在某些地形复杂的区域,仅依靠光谱特征进行地物分类无法达到满意的效果,需要结合地物的纹理特征来提高分类精度[12-13]。岳俊等[14]利用不同分辨率的GF-1 影像,采用光谱与纹理特征结合的方法对果树进行分类,精度较高。邵晓敏等[15]、郝剑南等[16]通过对遥感影像的纹理特征提取地物信息,结合光谱特征进行地物分类,结果证明光谱特征和纹理特征结合能有效提高遥感影像分类精度。目前针对Sentinel 数据,不少学者开展了研究,郭文婷等[17]、何云等[18]利用Sentinel-2 数据分别采用时序多特征和随机森林的方法对植被和森林土地覆盖进行了分类研究,取得了较好的成果。Sentinel-2A 影像数据因同时具有较高分辨率和丰富的波段信息,并且卫星重访周期较短,对提取地物的纹理信息有较大的帮助[19]。
本研究以沅江市为研究区域,以Sentinel-2A影像作为数据源,结合实地调查数据选取地物样本,通过对各地物的光谱指数特征和纹理特征进行分析,建立决策树模型进行地物分类。通过对比沅江市两个时期的森林覆盖区域,对森林覆盖变化进行研究。
1 材料与方法
1.1 研究区概况
沅江市位于湖南省东北部,地处洞庭湖流域,坐 标 为 112°14′ ~ 112°56′E,28°42′ ~ 29°11′N,总面积达2 177 km2,东临岳阳市,西连汉寿县,南与益阳市相接,北与大通湖区相望。沅江市地势西高东低,北部为开阔的平原,东南部为南洞庭水域,东北部多为湿地沼泽区。沅江市属亚热带湿润季风气候,降水丰富,光照充足。沅江市作为生态旅游城市,森林植被主要以乔木林、灌木林、竹林为主,湿地中多为芦苇。沅江市地理位置如图1 所示。
1.2 研究数据概述
欧空局在2014 年推出哥白尼地球环境监测项目,项目中的核心部分便是哨兵(Sentinel)系列卫 星。Sentinel-2 包 含 Sentinel-2A 和 Sentinel-2B 2 颗卫星,Sentinel-2A 在 2015 年 6 月发射并使用。Sentinel-2A 光学卫星的地面重访周期为10 d,安装的多光谱成像仪有13 个通道,包含空间分辨率为10 m 的波段4 个、空间分辨率为20 m 的波段6 个和空间分辨率为60 m 的波段3 个。选取沅江市2016—2017 年的两景Sentinel-2A 影像,产品等级为L1C 级,成像时间分别为2016 年8 月1 日和2017 年 5 月 18 日。
1.3 研究方法
以Sentinel-2A 遥感影像为研究数据源,通过实地调查和历史统计数据结合选取地物样本点,根据不同地物的光谱指数特征和纹理特征构建决策树并进行地物分类,提取不同时期森林覆盖区域,分析森林覆盖变化情况。
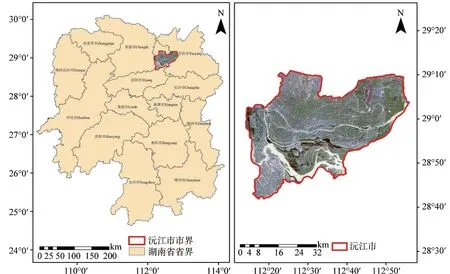
图1 沅江市地理位置Fig. 1 Geographic map of Yuanjiang city
1.3.1 光谱指数
在遥感应用领域,光谱指数越来越多地运用于分析和提取地物信息。根据不同地物的光谱特性,将遥感影像的不同波段分别进行组合计算,形成不同的光谱指数。光谱指数能对地物信息进行精确、有效的度量,在土地利用、植被分类、生物量监测和环境变化监测等方面有着重要意义[20]。
利用不同地物自身具有特殊光谱指数特征作为地物分类的重要依据,是当前地物分类的主要手段[21]。归一化差分植被指数(NDVI)较为准确地表示出植被的覆盖情况和生长状态,同时也能反映出水体、建筑和裸土等地表覆盖物,是地物分类中应用最为广泛的光谱指数[22]。归一化差分水体指数(NDWI)能有效提取影像中的水体信息,准确区分水体与其他地物,提升分类精度,是水体研究的重要指数[23]。在沅江市地物较为复杂的区域,归一化差分植被指数无法精确地反映建筑特征,结合归一化建筑指数(NDBI)进行分析,可准确提取建筑信息。光谱反射曲线表示了地物在不同波段下的反射率,根据不同地物的反射率差异,能有效区分地物类型,因此,将地物光谱反射曲线结合NDVI、NDWI 和NDBI 指数进行研究,能进一步提升地物分类的准确度。
1)NDVI
NDVI(Normalized difference vegetation index)归一化差分植被指数,广泛应用于植被生长、分类识别和覆盖度的监测。NDVI 用于监测植被和区分其他地物时,-1 ≤NDVI ≤1,负值表示地表为云、水、雪等;0 表示地表为裸土,NIR 和R近似相等;正值则表示地表有植被,并且植被覆盖度越大,NDVI 值越大。NDVI 公式如下:

式(1)中,NIR 为近红外波段,R为红波段。
2)NDWI
NDWI(Normalized diあerence water index)归一化差分水体指数,表示为绿波段与近红外波段的归一化比值指数,与NDVI 相比,它能更好地监测水体信息,有利于对旱情的监测。NDWI 公式如下:

式(2)中,G为绿波段。
3)NDBI
NDBI(Normalized building index)归一化建筑指数,NDBI 指数相比于NDVI 指数能够更好地监测建筑区域的特征,与NDVI 相结合,能有更佳的监测效果。NDBI 公式如下:

式(3)中,SWIR 为短波红外波段。
4)光谱反射曲线
地物的光谱反射曲线反映了地物反射率的变化。不同地物的光谱反射曲线各不相同,在某些波段下的反射率更是相差较大,因此,分析不同地物的光谱反射曲线可以得到对应地物的识别规律。因此各地物在不同波段下的反射率有明显差异,从而能以此进行地物分类识别。
1.3.2 纹理特征
纹理特征是对物体表面的全局反映,它能充分展示物体的图像信息,因此,它在分类识别、图像分割等方面有重要意义。纹理特征与光谱信息不同,它需要在特定范围内对像元点进行计算,分析其不同的特性,来反映地物的空间差异。随着遥感影像分辨率和影像质量的提升,纹理特征逐渐成为遥感影像地物分类的重要依据。
纹理将遥感影像的信息进行量化,不同的纹理反映了遥感影像不同的特征信息,也表现了各地物间的差异[24]。本研究选用常用的ENVI 中基于二阶概率统计(Co-occurrence measures)工具,它是基于二阶矩阵的8 个参数纹理进行特征分析,分别是均值(Mean)、同质性(Homogeneity)、相异性(Dissimilarity)、方差(Variance)、二阶矩(Second moment)、相关性(Correlation)、对比度(Contrast)和信息熵(Entropy)。其中,均值可表示影像的亮度,方差代表了影像的周期,信息熵则表示影像信息量和纹理的复杂程度,对比度表示影像中纹理的深浅程度和清晰度。不同影像中各纹理特征对地物分类的影响不同,所以在利用纹理探究各地物分类规则之前,还需利用累计差指标进一步分析各纹理在地物分类中的区分度,筛选适合本影像的纹理去研究。
1.3.3 决策树分类模型
决策树是一种二叉树结构的分类器,分为根节点和子节点,根节点中存放规则表达式,对像元进行计算,子节点中存放计算得到的结果,通过不断对像元进行特定规则的计算,最终在子节点上得到像元的分类结果。决策树分类不仅具有分类速度快的优点,而且能充分利用有效信息,让地物分类结果更加精确、科学。基于专家知识的决策树是在遥感影像数据及其他空间数据的基础上,结合专家经验进行分析总结,从而获取分类规则并以此进行遥感分类的方法,该分类方法的优点在于合理利用多源数据进行分类,分类过程也较为符合人的认知过程且分类规则易于理解[25]。
1.4 数据预处理
本研究运用欧空局提供的SNAP 专属插件Sen2Cor 对影像进行大气校正和辐射定标,使用ENVI 软件将20 m 分辨率的6 个波段运用3 次卷积法进行重采样,得到6 个10 m 的分辨率波段,与原有的4 个10 m 分辨率波段进行堆栈处理,生成具有10 个10 m 分辨率波段的Sentinel-2A 影像数据。通过分析研究区2017 年5 月18 日的Sentinel-2A 影像数据,结合历史数据和实地调查情况,可知沅江市湿地沼泽较多,芦苇作为当地特色经济作物,遍布各处湿地沼泽,形成特有的芦苇地。因此将沅江市地物分为森林、耕地、建设用地、水体和芦苇地。选取建设用地训练样本150 个、水体训练样本150 个、耕地训练样本200个、森林训练样本200 个和芦苇地训练样本100 个,总共800 个训练样本。2/3 的训练样本用于建立决策树分类规则,1/3 的训练样本用于精度检验。
2 结果与分析
2.1 光谱指数
对各地物训练样本进行光谱指数研究,计算各地物的NDVI、NDWI、NDBI 值和光谱反射曲线,比较各地物在不同光谱特征下的差异。研究区各地物的NDVI、NDWI、NDBI 指数和光谱反射曲线分别如图2 和图3 所示。
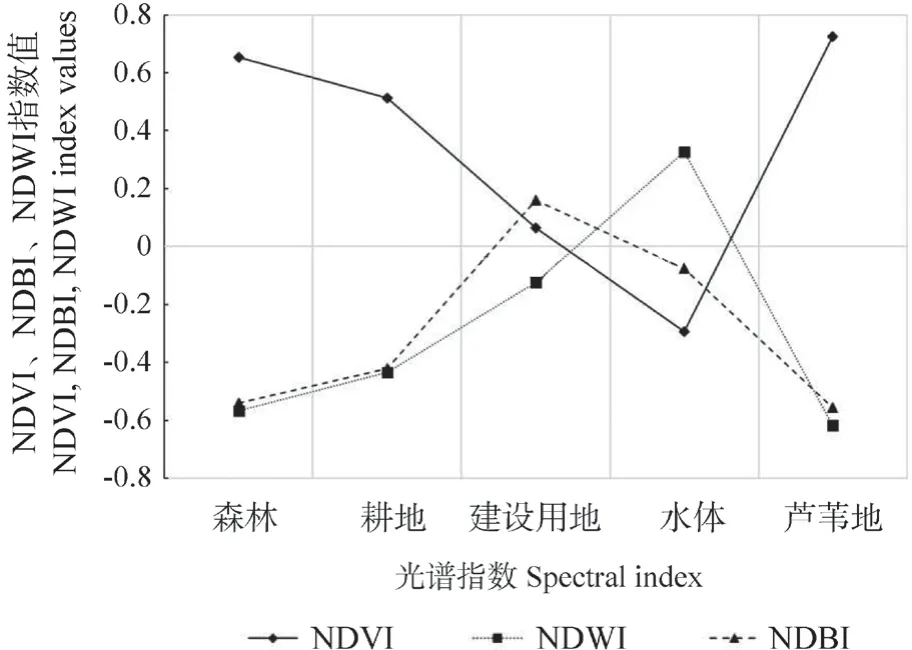
图2 沅江市各地物的 NDVI、NDWI、NDBI 指数Fig. 2 NDVI, NDWI and NDBI indexes of ground object in Yuanjiang city
2.2 纹理特征
利用ENVI 的基于二阶概率统计工具来提取纹理特征,选择合适的滑动窗口大小是分析纹理特征的关键步骤。为了选择合适的特征窗口大小,用代表地物区分度的累计差作为衡量指标,即计算不同窗口下的各地物的纹理特征值,将8 个纹理特征下的不同地物特征值的均值做累计差,累计差越大,说明区分度越高[26]。选择3×3、5×5、7×7、9×9、11×11、13×13、15×15 的窗口大小计算累计差,得到结果如图4 所示,可知累计差随着窗口大小的增大逐渐变大,在窗口大小为9×9 时达到最大值,之后累计差逐渐变小,所以选用9×9 大小窗口为纹理特征提取窗口。在滑动窗口为9×9 的情况下,计算各地物在8 个纹理特征下的累计差。图5 为9×9 滑动窗口下纹理特征的累计差,可以看出均值的累计差最高,其次为方差、信息熵和对比度,最后同质性、相异性、二阶矩和相关性的累计差比较低,因此选择均值、方差、信息熵和对比度这4 个纹理特征来研究。
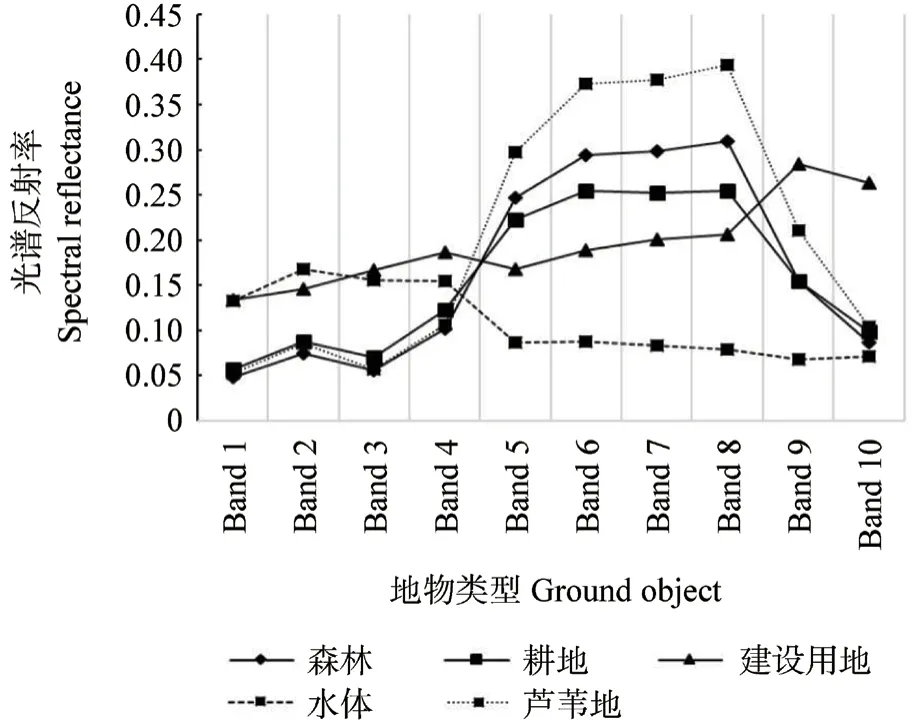
图3 沅江市各地物光谱反射曲线Fig. 3 Spectral reflection curve of ground object in Yuanjiang city
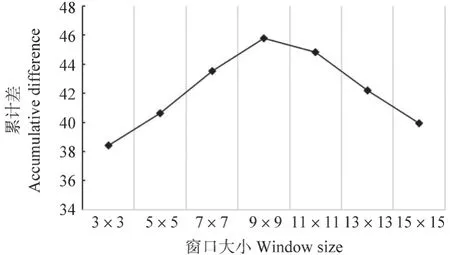
图4 不同滑动窗口下的累计差Fig. 4 Accumulative difference under different sliding windows
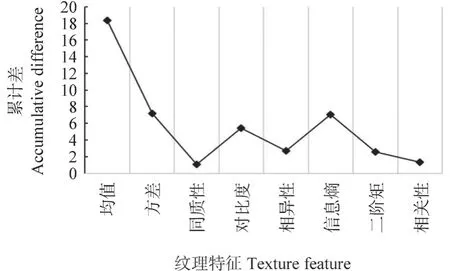
图5 9×9 滑动窗口下的纹理特征累计差Fig. 5 Accumulative difference of texture features under 9 × 9 sliding window
在9×9 的滑动窗口下提取4 种纹理特征值,对5 类地物提取的200 个特征值进行整理,研究各地物在不同波段下的单个特征值差异。经过分析计算得到不同波段下各地物的均值、方差、信息熵和对比度变化情况,结果如图6 所示。
2.3 决策树规则的建立
对得到的光谱特征和纹理特征分别进行分析,探讨各地物在不同特征下的判别方式。经过对特征差异整理可知,NDVI 值大于0.3、NDBI 值小于-0.3 的为植被,其余为非植被。非植被中,NDWI 值大于0.2、Band 9 反射率小于0.15 的为水体,其余为建设用地。植被中,Band 6、Band 7、Band 8 的 反射率大于 0.32 且 Band 6、Band 7、Band 8 的均值大于12 的为芦苇地,Band 7 的方差小于1.5 且Band 6、Band 8 的信息熵小于1.7、Band 7 的对比度小于1.5 的为森林,其余为耕地。决策树分类模型如图7 所示。
2.4 分类结果与精度评价
利用建立的决策树规则,在ENVI 决策树工具中新建决策树,输入节点名与表达式,对表达式中的各字段指定数据源,与对应波段建立联系。通过决策树模型得到的沅江市地物分类结果如图8所示,与传统监督分类方法作比较,运用最大似然法进行分类,结果如图9 所示。
利用验证样本对分类结果进行精度评价,2种分类方法的结果精度对比如表1 所示。从表1可知,决策树分类方法的地物总体分类精度达到83.62%,Kappa 系数为0.825 7,森林错分误差为17.57%,森林漏分误差为15.72%,森林制图精度为84.28%,森林用户精度为82.43%;最大似然法分类方法的地物总体分类精度达到72.35%,Kappa 系数为0.692 7,森林错分误差为27.15,森林漏分误差为26.31,森林制图精度为73.69,森林用户精度为72.85。决策树分类方法比传统的最大似然法分类方法的地物总体分类精度提升了11.27%,Kappa 系数提高了0.133,森林制图精度提高了10.59%,森林用户精度提高了9.58%。由此可知,结合光谱特征和纹理特征,运用决策树分类的分类方法在总体分类精度、Kappa 系数和森林的分类精度方面比传统的分类方法都有较大的提高,通过对各地物的多种特征指数分析能更准确、客观地进行地物分类并提取森林覆盖信息。

图6 各地物在不同波段下的均值、方差、信息熵、对比度的变化Fig. 6 Changes in the mean, variance, entropy, and contrast of ground object in different bands
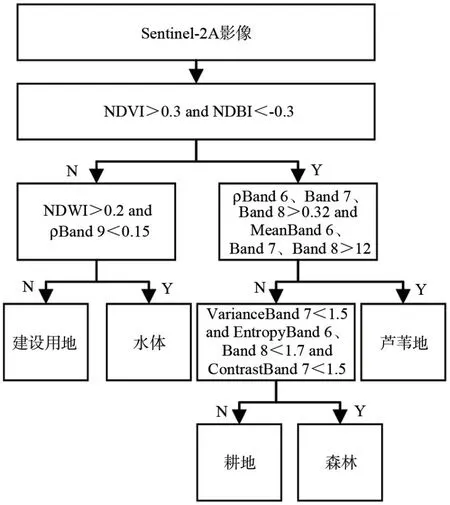
图7 决策树分类模型Fig. 7 Decision tree classification model
2.5 森林覆盖变化
2.5.1 沅江市各地物覆盖面积
将沅江市2016 年8 月1 日的Sentienl-2A 数据按上述方法选取地物训练样本后,运用决策树分类方法,结合光谱指数特征和纹理特征进行地物分类,得到的结果如图10 所示。
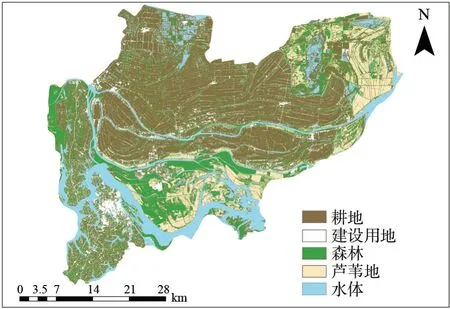
图8 决策树分类结果Fig. 8 Result of decision tree classification
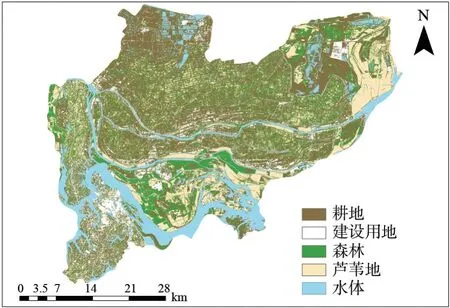
图9 最大似然法分类结果Fig. 9 Result of maximum likelihood classification

表1 决策树分类与最大似然法分类的结果精度对比Table 1 Comparison table of result accuracy between decision tree classification and maximum likelihood classification
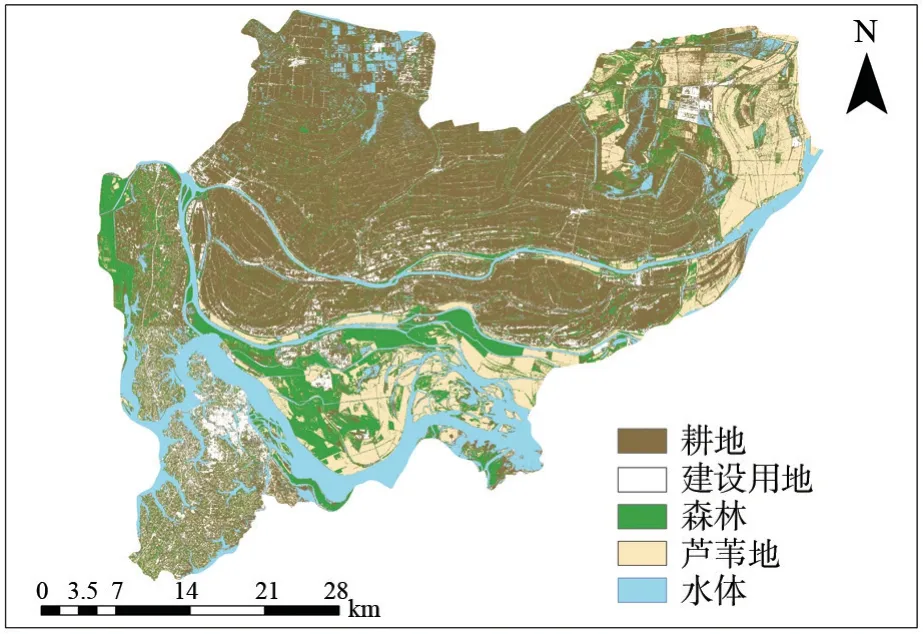
图10 沅江市2016 年8 月1 日地物分类结果Fig.10 Result of ground object classification of Yuanjiang city on August 1, 2016
根据沅江市 2016 年 8 月 1 日和 2017 年 5 月18 日两个时期的地物分类结果,计算两个时期各地物类型的面积,得到统计结果如表2 所示,从表2 中可以看出森林面积减少了771 hm2。
2.5.2 沅江市森林覆盖变化分析
利用ArcGIS 软件,在沅江市两个时期的地物分类结果中将森林覆盖区域的数据提取出来,得到沅江市2016 年8 月1 日森林覆盖结果和沅江市2017 年5 月18 日森林覆盖结果,分别如图11 和图12 所示。
提取沅江市 2016 年 8 月 1 日与 2017 年 5 月18 日森林覆盖发生了变化的区域,得到的结果如图13 所示。从图13 中可以看出,森林主要伴随着耕地区域发生交替变化,在东北角的芦苇地区域,也存在较明显的森林变化现象,西南部冈陵地区的森林有所增加,在西北部冈陵地区和南部水体附近的森林变化较少。
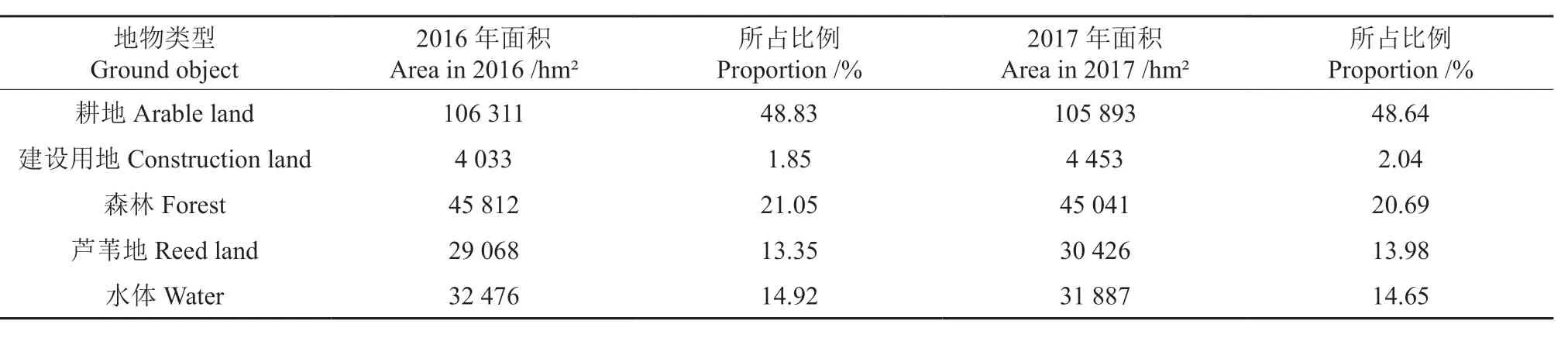
表2 沅江市各地物面积统计Table 2 Statistics of the area of ground object in Yuanjiang city
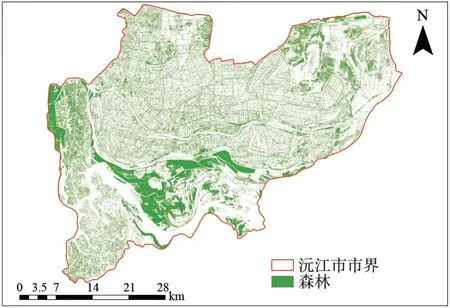
图11 沅江市2016 年8 月1 日森林覆盖结果Fig.11 Results of forest cover in Yuanjiang city on August 1, 2016
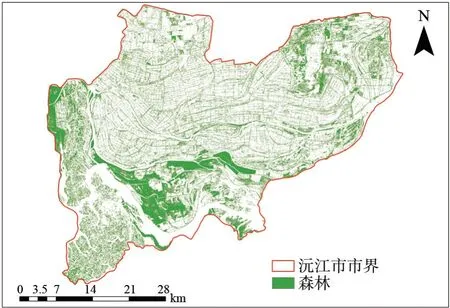
图12 沅江市2017 年5 月18 日森林覆盖结果Fig.12 Results of forest cover in Yuanjiang city on May 18, 2017
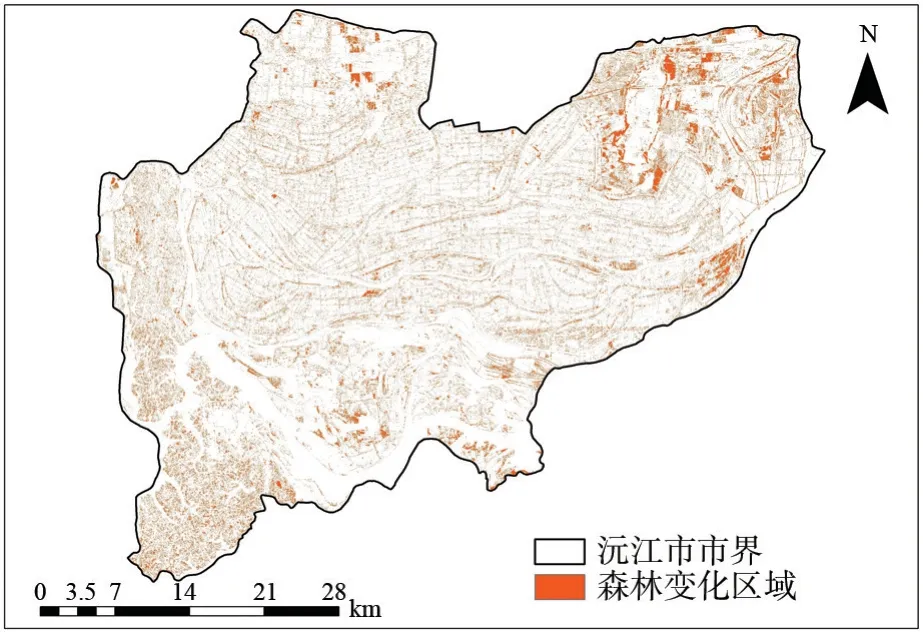
图13 沅江市 2016 年 8 月 1 日与 2017 年 5 月 18 日森林覆盖变化Fig.13 Results of forest cover change in Yuanjiang city on August 1, 2016 and May 18, 2017
将沅江市 2016 年 8 月 1 日与 2017 年 5 月 18日森林覆盖变化数据与同时期的地物分类结果做对比,将森林与各地物间的变化面积进行统计,结果如表3 所示。从表3 中可以看出,沅江市在这两个时期内森林主要转化为耕地,其次是芦苇地和建设用地,少部分转化为水体,面积依次是854、589、412 和 105 hm2。转化为森林的其他地物主要以耕地为主,芦苇地和建设用地各占20%,水体较少,转化面积依次是636、257、243和53 hm2。
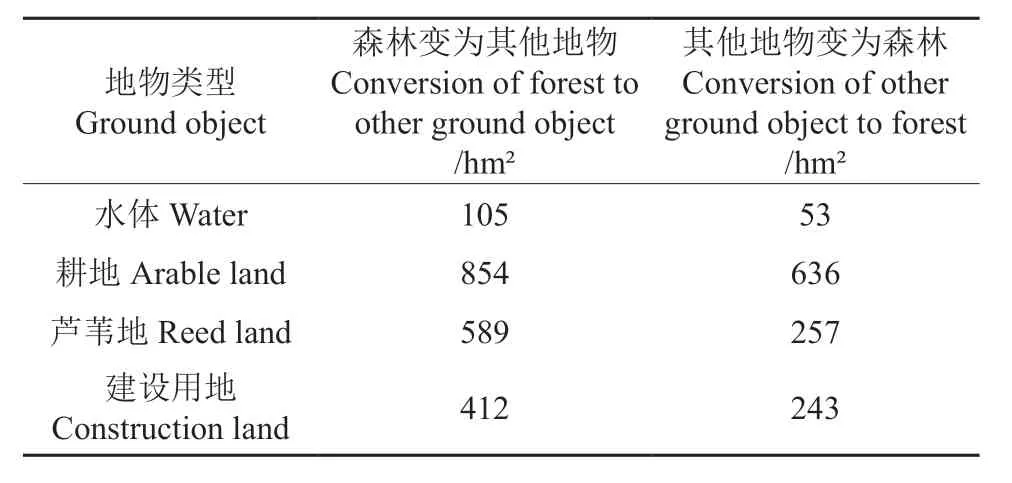
表3 沅江市 2016 年 8 月 1 日与 2017 年 5 月 18 日森林与其他地物面积变化统计Table 3 Statistics of changes in forest and other ground object in Yuanjiang city on August 1, 2016 and May 18, 2017
3 结论与讨论
3.1 结 论
本研究选取湖南省沅江市为研究区域,基于Sentinel-2A 光学遥感数据和实际调查数据,选取地物训练样本,采用决策树分类方法,利用各地物在Sentinel-2A光学遥感影像下的光谱指数特征、纹理特征的差异,建立区分各地物的决策树分类模型,得到的地物分类结果与传统的最大似然法的地物分类结果做精度比较。选取沅江市2016 年8 月 1 日 和 2017 年 5 月 18 日 的 两 期 Sentinel-2A影像进行地物分类,分别提取其森林覆盖区域,分析不同时期森林覆盖变化情况。
主要的结论如下:
1)利用Sentinel-2A 数据,结合地物的光谱指数特征和纹理特征能更加精确有效地对沅江市进行地物分类和森林覆盖变化的监测。选取地物训练样本,提取各地物的光谱指数特征和纹理特征,充分挖掘信息,分析各地物间的区分规则,构建决策树模型,对研究区地物类型进行精确分类。分类结果精度与传统最大似然法分类结果精度比较可知:结合光谱指数特征和纹理特征的决策树分类结果较最大似然法分类结果,地物总体分类精度提升了11.27%,Kappa 系数提高了0.133,森林制图精度提高了10.59%,森林用户精度提高了9.58%。
2)沅江市总面积217 700 hm2,在2016 年8月1 日到2017 年5 月18 日这段时间内,森林面积占全市总面积的21%。在此期间,森林面积减少771 hm2,沅江市森林覆盖变化情况是854 hm2森林变为耕地,589 hm2森林变为芦苇地,412 hm2森林变为建设用地,105 hm2森林变为水体,另外,有636 hm2耕地、257 hm2芦苇地、243 hm2建设用地和53 hm2水体变为森林。
3.2 讨 论
1)本研究选用Sentinel-2A 数据作为研究数据源,借助其波段信息较多的特点,结合地物的光谱指数特征和纹理特征,提高了地物分类精度。这与岳俊等[14]、邵晓敏等[15]、郝剑南等[16]的研究结论一致,即加入纹理特征研究确实能有效提高地物分类精度。本研究的分类结果精度较大多数运用单一光谱指数的分类结果精度有所提升。对比岳俊等[14]基于GF-1 影像的2、8、16 m 分辨率数据,结合光谱和纹理特征对果树进行分类识别,本研究决策树分类方法的总体分类精度分别提升了6.71%、16.16%和22.39%。对比郭文婷等[17]基于多个时间的Sentinel-2 数据,运用NDVI 时序加光谱指数特征的分类结果精度,本研究决策树分类方法的总体分类精度提升了10.59%,Kappa系数提升0.155 7,但其结合纹理特征进行分类后,总体分类精度更高。本研究决策树分类方法在森林制图精度和森林用户精度方面,对比邵晓敏等[15]在乌兰布和沙漠地区某些树种的制图精度和用户精度有所提升。
2)参考其他学者的研究,本研究结合光谱指数特征和纹理特征的决策树分类方法还可进一步提升分类精度。郝剑南等[16]在利用高分影像对耕地进行提取时,通过纹理增强提升精度。在进行较长时间间隔的森林覆盖变化研究时,也可如郭文婷等[17]采用时间序列的方法,利用森林不同时间的物候信息,使分类结果更加准确、科学。本研究中所用到的光谱指数特征和纹理特征有限,可在之后研究中继续探究其他特征对分类精度的影响,何云等[18]对Sentinel-2A 影像进行特征优选的研究对此有参考价值。
3)在对森林覆盖变化的分析中,本研究分析了森林与其他地物之间的相互变化,在之后的研究中可加入树种信息、地形信息等,进一步深入探究森林覆盖变化与树种、地形等因素的关系。另外,本研究只探究了沅江市2016 年8 月1 日到2017 年5 月18 日之间的森林覆盖变化,时间间隔较短,不利于总结变化规律,下一步研究中可加大时序间隔进一步分析,探究森林覆盖变化规律。
猜你喜欢
湖南水利水电(2021年6期)2022-01-18
江苏科技报·E教中国(2021年19期)2021-12-08
科教新报(2021年44期)2021-12-01
软件(2020年3期)2020-04-20
科教新报(2020年45期)2020-03-15
摄影之友(影像视觉)(2018年12期)2019-01-28
电子制作(2018年16期)2018-09-26
Coco薇(2017年8期)2017-08-03
科学与财富(2016年32期)2017-03-04
电子制作(2017年24期)2017-02-02