数字滤波器级联设计及仿真
2020-08-31 06:55崔永青史琳芸阴超波
网络安全与数据管理 2020年8期
崔永青 ,史琳芸 ,阴超波
(1.宝鸡职业技术学院 机电信息学院,陕西 宝鸡 721013;2.西安理工大学 自动化与信息工程学院,陕西 西安 710048)
0 引言
在测振仪中,需要应用到数字加速度传感器,它输出的所有信号都属于加速度数字信号。对于该信号而言,如果处于噪声环境中,会大大降低加速度传感器输出信号的准确性。因此,需要通过数字滤波器对其进行处理。数字滤波器的工作原理是依据离散系统的特性对系统的输入信号进行加工和变换,从而使它们的频谱或者信号波形发生变化,保证被需要的频率信号顺利通过,并抑制无用的信号通过。对于数字滤波器而言,其不仅具有很高的滤波精度,而且它的灵活性也比较好。
本文以传感器的输出信号作为研究对象,分析其频谱特性,针对其中的噪声信号设计相应的数字滤波器。通过低通滤波器,能够把高频率的信号阻挡在外面,对于低频信号,则尽量保持其信号的准确性。理想低通滤波器具有非常好的滤波效果,几乎不存在失真现象,一般情况下,把通频特性视为矩形,但在实际应用过程中,在所截止的频率中存在一些过渡带。通过陷波滤波器能够把频率范围较小的信号筛选出来,陷波滤波器可以将某一特定信号频率点的信号衰减为零,而对于其他的频率信号保持不变。结合该加速度传感器的使用环境和要求,将低通滤波器与陷波滤波器两者进行级联设计作用于传感器输出,从而得到准确有效的信号。
1 对加速度传感器信号进行频谱分析
采集加速度传感器的输出信号,并对其进行频谱分析[1],结果如图1 所示。结合该传感器的使用环境,认为该信号在50 Hz 附近存在较大噪声。同时对于该加速度传感器而言,其使用频率范围为300 Hz 以下的低频段,因此 300 Hz 以上的信号可以不用考虑。
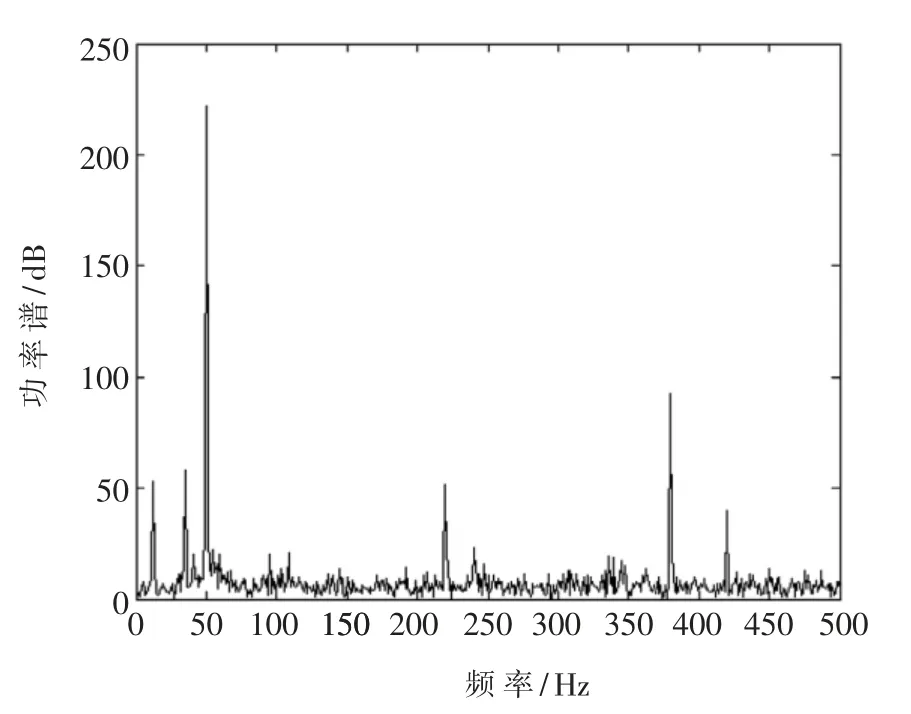
图1 加速度传感器原始信号频谱分析
2 数字滤波器设计
通过上述分析可知加速度传感器输出信号存在50 Hz 单点噪声,同时该传感器使用频率为300 Hz以下低频段。因此设计 300 Hz 低通数字滤波器和50 Hz 陷波数字滤波器级联完成对加速度传感器信号的滤波处理,从而减少自身噪声和环境噪声对加速度传感器输出信号的干扰。
数字滤波器具有精度高、稳定性强和灵活性好等优点。根据离散系统的时域特性,数字滤波器划分为以下两种类型:无限冲激响应滤波器(IIR 滤波器)、有限冲激响应滤波器(FIR 滤波器)[2-3]。对于IIR数字滤波器,在获得同样的技术指标时,它的阶数更少[4]。通过深入分析 IIR 数字滤波器的特性[5-12],本文采用IIR 数字滤波器进行设计。
2.1 300 Hz 低通数字滤波器设计
IIR 低通数字滤波器设计步骤如下[13]:
(1)分析实际的工程需求,明确滤波器需要的性能指标。对于一般的性能指标而言,通常包含阻带

(3)按照模拟低通滤波器的技术指标设计模拟低通滤波器。
(4)构建模拟滤波器 H(s),并使其从 s 平面转移到z 平面,从而得到数字低通滤波器的系统函数H(z)。
IIR 数字滤波器在MATLAB 中的实现方法如下:
首先,根据数字低通滤波器的性能要求设计模拟低通滤波器,然后通过脉冲响应不变法或双线性变换法将其进行数字化,转化为所需的数字低通滤波器。在MATLAB 中进行 IIR 滤波器设计的相关函数说明如下[14]:
(1)巴特沃兹滤波器设计函数:[B,A]=butter(N,W,options)
该函数得到一个用有理分式表示的低通数字滤波器系统函数,该系统函数的分子分母系数向量为 B 和 A。该函数的参数 N 为指定低通滤波器的阶数,W 为截止频率。
(2)巴特沃兹滤波器阶次选择函数:[N,W]=buttord(Wp,Ws,Rp,Rs,′s′)或[N,Wn]=buttord(Wp,Ws,Rp,Rs)
设计出符合巴特沃兹低通滤波器所需的最低阶次 N 以及3 dB 截止频率 Wn,其中 Wp代表通带截止频率,Ws代表阻带截止频率,Rp代表最大通带衰减,Rs代表最小阻带衰减,s 表示模拟滤波器。
(3)双线性变 换 函数 :[Bz,Az]=bilinear(Bs,As,Fs)
把模拟滤波器的[Bs,As]转换成实际采样频率为 Fs的数字滤波器[Bz,Az]。其中 Bs为模 拟滤 波器传递函数的分子系数行向量,As为模拟滤波器传递函数的分母系数行向量。
(4)频率特性响应函数:[H,w]=freqs(b,a,N)
函数可以得到数字滤波器的频率响应H(z)。其中b 表示连续系统的系统函数分子多项式的系统截止频率 ωs,阻带衰减 αs,通带截止频率 ωp,通带衰减 αp。
(2)在明确所需的技术指标以后,构建相应的数字滤波器模型。综合分析数字低通滤波器的相关技术指标,并将其化转为模拟低通滤波器所需的技术指标。在这一过程中,主要应用的是双线性变换法,其中,边界频率存在以下转换关系,见式(1),其中 Ω表示模拟角频率,w 表示数字频率。向量,a 表示连续系统的系统函数分母多项式的系统向量,N 表示频率等分点数,默认为 512。
2.2 50 Hz 陷波数字滤波器设计
当带阻滤波器具有很窄的阻带时,通常将其称作是陷波滤波器。陷波滤波器的设计是以模拟滤波器为原型,通过一定变换转换为数字滤波器[15]。在设计陷波滤波器时,常常应用以下两种方法:(1)通过z 平面零极点法,设计 IIR 数字陷波滤波器;(2)通过MATLAB 的信号处理设备,设计数字滤波器。
(1)在设计 IIR 数字陷波滤波器时,一般采用的是 z 平面零极点法。由 IIR 滤波器的传递函数知道,它的分子、分母多项式作因式分解可得式(2):

其中,A 代表的是系统的增益。如果把 z 当作极坐标,那么对于z=rejw,当 r=1 时,所进行的 z 变换称作是傅里叶变换。所以,在上面的IIR 数字滤波器的传递函数中,对于复变量 z,如果利用 ejw进行取代,就能够获得 IIR 数字滤波器的频率特性 H(ejw)。采用该方法设计一个IIR 陷波滤波器,如对w0点进行陷波,即当 w=w0时,|H(ejw)|≈1,则取极点 z=ae±jw0,从而得到IIR 陷波滤波器传递函数如式(3)所示:

(2)通过 MATLAB 的信号处理工具箱 Fdatool 对数字滤波器进行设计十分便捷,可大大减小工作量。在进行设计时,可以对比分析滤波器具有的不同特性,调整相关的参数,以获得最佳的设计效果。
本文在设计50 Hz 陷波滤波器时,主要应用的是 MATLAB 信号处理工具箱 Fdatool。选择 Design Filter,滤波器类型选择单点陷波滤波器,设计方法为 IIR,采样频率为 1 000 Hz,陷波频率为 50 Hz。在把陷波滤波器的所有系数都计算完成以后,再深入分析陷波滤波器的相关性能,进而验证滤波器是否达到了设计要求。选择 Fdatool 的菜单“Analysis”->“Magnitude Responae”,启动幅频响应分析,得陷波滤波器频谱如图2 所示,该图表示该陷波滤波器对50 Hz 单点信号能够进行有效衰减,满足设计要求。
2.3 低通滤波器和陷波滤波器级联设计
针对加速度传感器信号的噪声分别设计300 Hz低通滤波器和50 Hz 陷波滤波器之后,将两个滤波器进行级联设计以达到低通滤波和陷波滤波双重目的。具体实现方法即先将原始信号经低通滤波处理,之后再经过陷波滤波处理,这样即可达到两个滤波器级联的效果。级联设计如图3 所示。

图3 滤波器级联设计
3 对滤波处理后的信号进行频谱分析
3.1 低通数字滤波器
通过上述巴特沃兹滤波器设计出了300 Hz 低通数字滤波器,在对原始信号实施低通滤波以后,再进行频谱分析,最终分析结果如图4 所示。对比原始数据频谱,表明300 Hz 以上信号基本被滤除,300 Hz 以下信号不受影响,从而可知该滤波器有效地实现了低通滤波功能。
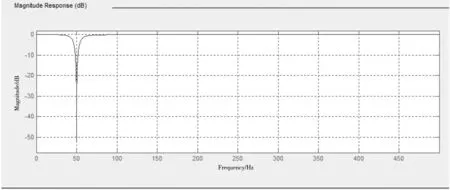
图2 采用Fdatool 设计陷波滤波器
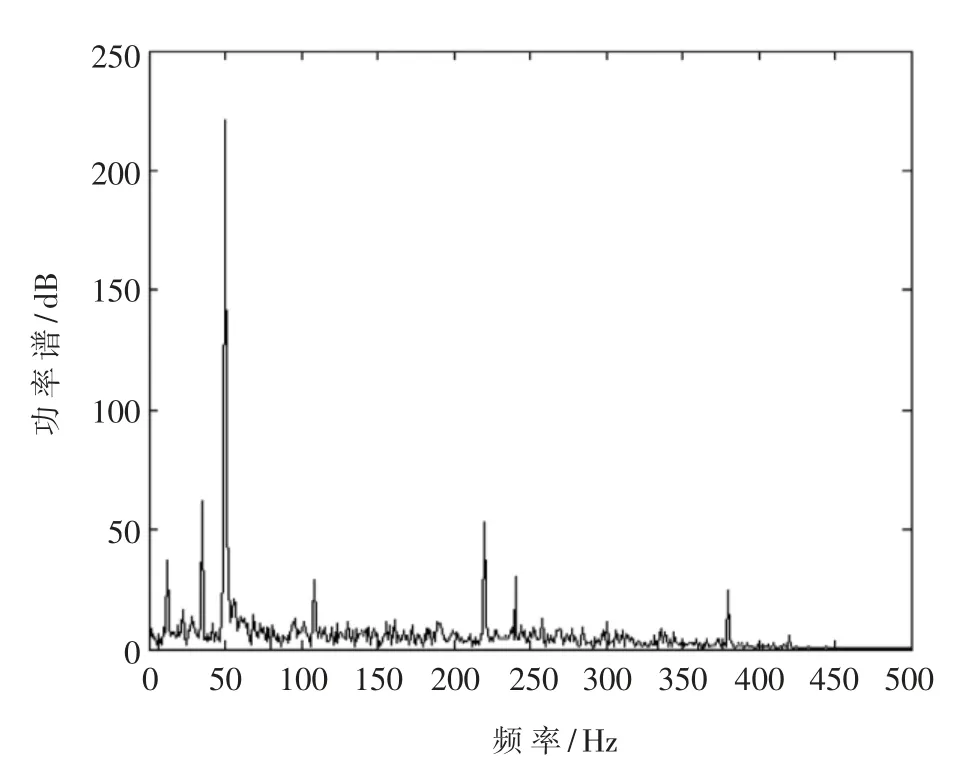
图4 经300 Hz 低通滤波器处理后信号频谱分析
3.2 陷波数字滤波器
对该陷波滤波器作用于原始信号后的数据进行频谱分析,结果如图5 所示。对比原始数据频谱,表明50 Hz 单点噪声已被滤除,其他信号不受影响,从而可知该陷波滤波器有效实现了50 Hz 陷波滤波功能。
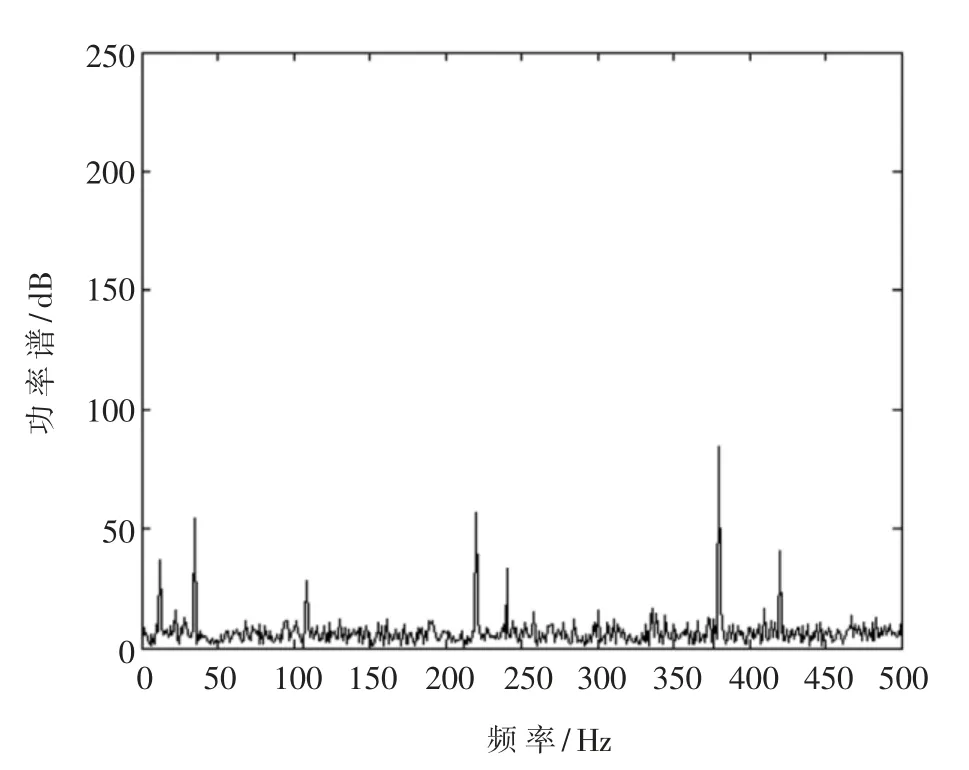
图5 经50 Hz 陷波滤波器处理后信号频谱分析
3.3 低通数字滤波器与陷波滤波器级联
在分别验证了低通滤波器和陷波滤波器的滤波作用之后,将两个滤波器级联作用于加速度传感器信号,对经滤波后的数据进行频谱分析,如图6所示。数据频谱表明 50 Hz 单点噪声和 300 Hz 以上噪声均被有效滤除,并且两个滤波器级联不影响各自单独的作用,满足了对该信号的滤波设计要求。
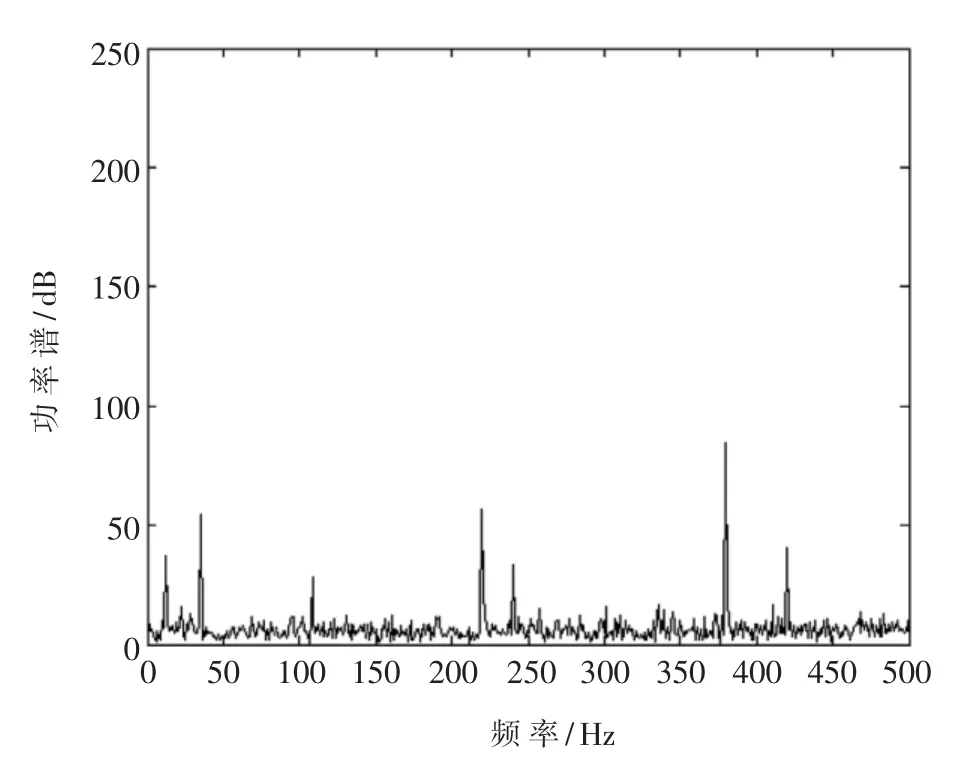
图6 经低通滤波器和陷波滤波器级联处理后信号频谱分析
4 结束语
对于加速度传感器信号而言,因为受到各种因素的影响,通常存在高频或者低频的干扰信号,从而导致信号失真现象,为了解决这一问题必须进行滤波处理。根据传感器的使用环境要求、噪声信号水平,本文设计了300 Hz 低通滤波器、50 Hz 陷波滤波器,把其中高于300 Hz 频率的噪声和 50 Hz 单点噪声消除掉,最终得到所需的低频信号。本文详细阐述了IIR 低通数字滤波器的具体设计方法,并通过 MATLAB 工具箱Fdatool 设计陷波滤波器的具体过程。在分别验证了单个滤波器的性能之后,将两个滤波器级联起到对传感器信号进行双重滤波的作用。对经滤波处理的输出信号与原始信号进行对比分析,该级联滤波器有效地起到了滤波作用,并且未对有用信号造成影响,有效提高了系统的抗干扰能力。同时本文所设计的数字滤波器操作过程简便、易于实现。
猜你喜欢
核安全(2022年3期)2022-06-29
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
科技资讯(2016年31期)2017-03-30
物联网技术(2014年12期)2014-12-24
现代电子技术(2014年8期)2014-09-27
汽车与新动力(2014年4期)2014-02-27
原子能科学技术(2011年10期)2011-07-30