基于图像灰度值模型测定土壤含水量研究
2020-08-31 08:44罗东城张立成廖健程马小岳谢仕豪胡德勇
山东农业科学 2020年7期
罗东城,张立成,廖健程,马小岳,谢仕豪,胡德勇
(1.湖南农业大学工学院,湖南 长沙 410128;2.福建省农业科学院,福建 福州 350013)
土壤水分含量是作物生长的关键因素,不同类型作物对土壤水分需求量不同。根据作物需水规律进行灌溉是现代农业精准控制灌溉的发展趋势[1]。作物需水规律是指作物生长的不同阶段对土壤水分含量需求不同的变化规律。实现农业生产中对作物供水的精准控制灌溉,首先要测出土壤的实际含水量。现有的测定土壤含水量的方法有土壤烘干称重法、电阻传感法、中子散射法、时域反射法、频域发射法等[2]。这些方法有的测量时间长,有的成本较高,不适于农业生产广泛推广应用,探索快速、精准、成本低的土壤含水量测定方法仍是研究者研究的方向。
目前,视觉成像技术与数值化分析相结合在农业领域的应用越来越广[3,4]。张荣标等[5]提出了基于图像处理的土壤表层含水率在线检测方法,通过采集土壤表层图像及提取图像中与水分含量相关的特征参数——灰度值进行。毛天旭等[6]研究发现土壤表面灰度值与表层土壤含水量呈指数负相关。土壤表层图像灰度值与含水量相关,是因为土壤含水量会影响土壤中的矿物质溶解以及水分附着在土壤颗粒体表面使漫反射光谱发生变化[7]。一般情况下土壤含水量由高到低其颜色由深变浅,利用这个变化特征建立数学模型可以比较精准地根据土壤颜色来判定土壤含水量[8]。但视觉图像技术中通过光感摄像头采集的土壤图像会受到自然光照的影响,天气变化导致的光照强弱不同对土壤表层图像的特征值影响较大[9,10]。因此,仅以采集到的土壤表层土壤图像反映土壤含水量可能会存在较大误差,而且通过表层图像测定出的土壤含水量也不能真实反映作物根系层土壤含水量。
基于对光感摄像头采集图像过程中干扰因素的考虑,本研究采用暗盒补光技术采集作物根系层土壤图像,有效避开了自然条件下太阳光照强弱的影响;采集两种不同类型的土壤,通过多次重复试验测定不同含水量条件下的土壤图像灰度值,并对测定结果进行相关数学模型分析,拟合出土壤含水量与土壤灰度值的关系函数,以期探究出一种较为便捷、准确测定根系层土壤含水量的方法。
1 材料与方法
1.1 试验土样及图像采集
试验土壤取自湖南农业大学耘园实验基地长年种植水稻的红壤和种植花生的红黄泥土。将水稻土编号为RS,花生土编号为PS。RS有机质含量21.36 mg/kg,PS有机质含量15.49 mg/kg。自制280 mm×280 mm×300 mm的铁皮暗盒,上表面开孔安放摄像头,用1 300万高清摄像头采集根系层土壤图像。
1.2 试验方法
将采集的土样在自然状态下风干,过2 mm筛去除植物根系残渣,测初始含水量。称取过筛土壤100 g于培养皿中,用量筒缓慢加水至土壤含水量达到饱和状态,记录加水量。将培养皿放入105℃烘箱中,每隔一定时长从烘箱中取出培养皿称重记录水分减少量并在暗盒中对其进行补光拍照。
采集的图像灰度值计算方法:图像是由一个个像素点构成,每个像素点的颜色是通过红绿蓝三基色组成,每个基色的值为0~255,将其转换成灰度值的方法是对像素点上的每种基色值乘以1/3相累加,所得值在0~255范围内,0为全黑,255为全白。数字图像实质是一个数学矩阵,矩阵中的每一个元素就是图像的一个像素点,图像中的平均灰度值是对图像的每个像素点的三基色转换成灰度值进行累加然后除以像素点个数。图像灰度值的统计通过Matlab软件编写程序进行计算。
公式(1)中xi表示第i个像素点;G(xi)表示图像第i个像素点的灰度值;r(xi)是第i个像素点的红基色度值;g(xi)是第i个像素点的绿基色度值;b(xi)是第i个像素点的蓝基色度值。公式(2)中表示图像的平均灰度值。
2 结果与分析
2.1 土壤含水量与图像灰度值
水稻田和花生地两种类型土壤的含水量与其对应的图像平均灰度值见表1、表2。
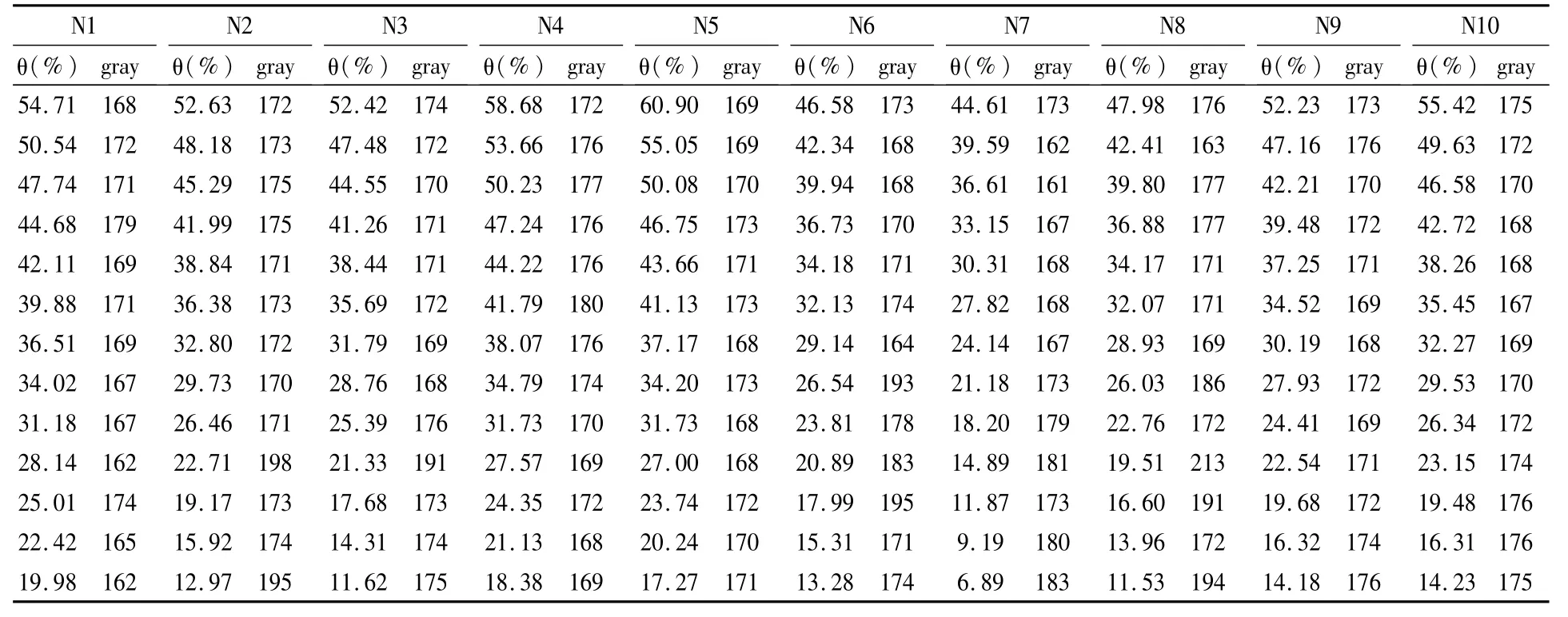
表2 花生地土壤含水量与其对应的图像平均灰度值
2.2 土壤分段含水量与灰度值的离散分析
每一个培养皿装入土壤的初始含水量不同使土壤含水量下降情况各不相同,因此每组含水量数据的变化规律不同,需要进行离散分析以找出含水量与灰度值最接近的离散点。为了便于统计分析,以5%作为一个跨度进行土壤含水量分段,分别提取各分段土壤含水量的灰度值,并对各段含水量的灰度值进行离散分析,通过线性回归方程计算离差平方和最小的灰度值作为分段含水率中位数的灰度值,水稻田和花生地土壤分段含水量与灰度值的离散分析结果见表3、表4。
2.3 土壤含水量与平均灰度值的函数拟合
采用最小二乘法对水稻田和花生地土壤含水量与灰度值变化趋势进行拟合,结果见图1、图2。
由图1中离散点的分布可知,当水稻田土壤含水量较低时灰度值较高,随着含水量升高,土壤图像灰度值下降;当土壤含水量达到30%时,图像灰度值最低,之后含水量继续升高,土壤图像灰度值又逐渐上升。据此,对其变化规律分别进行二次项拟合和三次项拟合,拟合函数分别为y=0.0231x2-1.5517x+197.4078和y=-0.0003x3+0.0544x2-2.3044x+201.2471,拟合优度分别为R2=0.9058和R2=0.9733,可见三次项拟合水稻田含水量与土壤图像灰度值关系的优度更好。
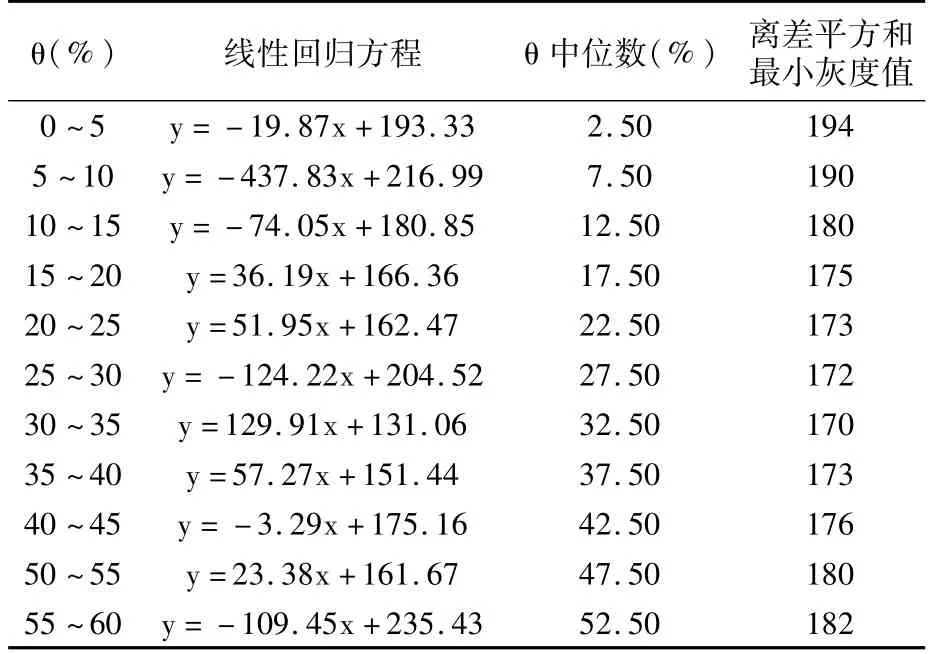
表3 水稻田土壤分段含水率对应平均灰度值的离散分析结果

表4 花生地土壤分段含水率对应平均灰度值的离散分析结果
花生地土壤含水量与灰度值关系的变化规律与水稻田类似(图2),也为土壤含水量较低时图像灰度值最大,之后随着土壤含水量的升高,土壤图像灰度值下降;当土壤含水量达到30%时,土壤图像灰度值最低,之后又有小幅上升;当土壤含水率超过50%时,土壤图像灰度值又下降。经二次项和三次项函数拟合,拟合方程分别为y=0.0360x2-2.5708x+212.3572和y=-0.0017x3+0.2042x2-7.4668x+254.5079,拟合优度分别为R2=0.8847和R2=0.9815,仍以三次项拟合的优度最好。
2.4 拟合值与实测值的误差检验
利用拟合优度最佳的三次项数学模型估算土壤含水量,并与实测值进行对比验证,结果(表5)表明,采用图像灰度值拟合函数模型测得的水稻田土壤含水量与烘干法测得的土壤含水量相比,偏差范围在-5.94% ~2.42%,偏差绝对值平均为2.09%;采用图像灰度值拟合函数模型测得的花生地土壤含水量与烘干法测得的土壤含水量相比,偏差范围在-3.82%~2.36%,偏差绝对值平均为1.78%。两种类型土壤均为含水率较大时,利用图像灰度值估算的土壤含水量值与实测值偏差较大,这可能是因为土壤含水量较小时土壤颜色变化明显,而土壤含水量较大时土壤颜色变化较小,导致估算值与实测值的偏差较大。但两种土壤类型估算值与实测值的偏差均在6%以下,属于偏差可接受范围,说明拟合的数学模型能够较为准确地估算出土壤含水量。
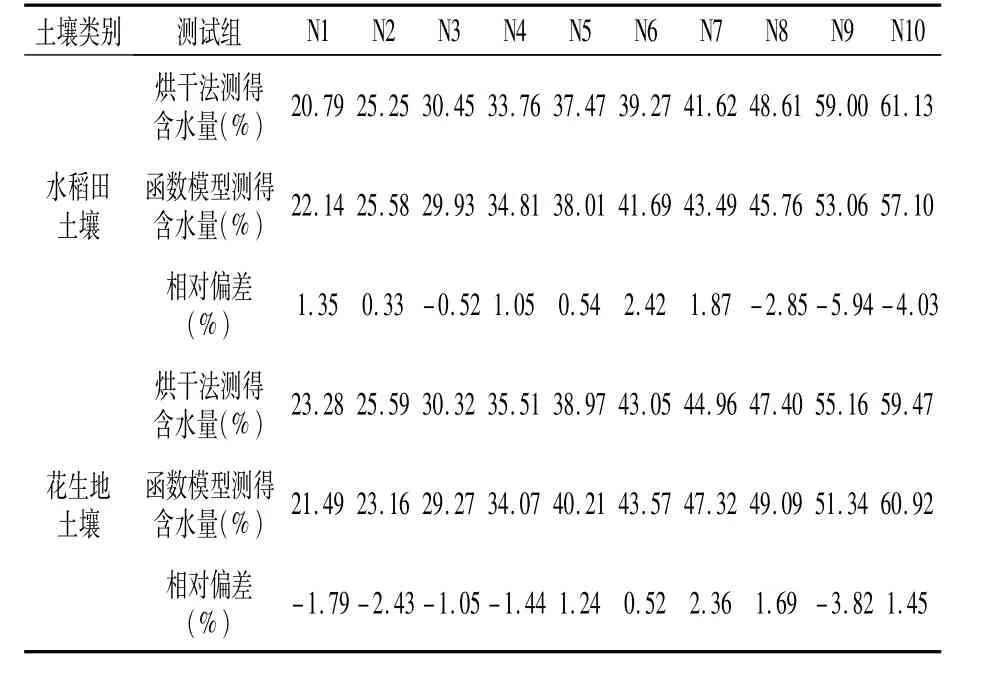
表5 利用灰度值估算的土壤含水量值与烘干法实测值的差异分析
3 讨论
图像识别数值化分析是计算机智能视觉技术的研究前沿,农业上应用的图像识别技术是现代农 业 工 程 领 域 的 研 究 热 点[11,12]。kuchenbuch等[13]通过图像二值化分析得出土壤含水量与土壤表层图像灰度值存在近似的线性关系。但本研究结果显示土壤含水量与灰度值大小是一种非线性关系,这与赵伶俐等[14]的研究结果相一致。
数字图像是由每一个像素点构成,彩色数字图像的像素点是由RGB三通道组成,每个通道占8位字节,数值为0~255。图像的显色原理实际上是通过每个像素点的数值展现出不同的颜色变化[15]。本研究对土壤灰度图像获得及特征灰度值的求法进行了创新探索,通过自编程序分离出图像中每个像素点的RGB三原基色,取每个原基色值的1/3进行累加后转换成灰度值。
研究土壤灰度值与含水量的关系,关键在于能否真实准确地提取土壤灰度值特征参数,以往的研究主要是对图像中众多的像素灰度值进行排序,用排序后相应的中值代替图像中心像素原来的灰度[16,17]。本研究对灰度特征参数提取进行了改进,用计算图像平均像素灰度值的方法替代原来的中值法。平均像素灰度值的求法类似于扫描仪原理,即将一张图像看作是一个数学矩阵,图像的像素就是矩阵中的元素,平均像素灰度值是对矩阵中的每个像素点进行扫描累加然后除以像素点的个数。
土壤灰度值特征参数提取后则需要进行相关性的拟合,为保证拟合的可靠性,试验以5%的土壤含水量跨度对土壤含水量进行分段,通过回归分析提取出分段含水量中位数所对应的灰度值,并进行多项式的数学模型拟合。水稻田和花生地土壤的拟合结果均以三次项数学模型最佳。两种土壤所建立的模型各不相同,可能是由于水稻田和花生地土壤中的物质成分及含量存在差别。有学者研究认为土壤有机质和铁元素含量是土壤颜色的主要影响因素[18,19]。水稻田土壤与花生地土壤颜色存在差别,可能是水稻田土壤中水稻根系残茬在微生物作用下转变成土壤有机质使其含量增加,从而造成两者间的差异。
4 结论
本试验通过优化算法改进了图像识别中土壤灰度值提取的方法,使土壤灰度值与含水量的相关特征更为准确。多组试验采用离散分析对土壤含水率分段取中位数,再通过数学模型拟合土壤灰度值与含水量的相关性。水稻田土壤和花生地土壤的模型存在一定的差异,说明不同土壤含水量测定需采用不同的模型特征分析。两种土壤应用最佳拟合的数学模型对土壤含水量进行测定,其结果与烘干法测定结果的偏差小于6%,两类土壤均为含水量超过30%时偏差较大。综合来看,建立的三次项拟合模型能满足两种田间土壤的含水量测定,相比其他检测法便捷、快速、稳定,可以应用于自动控制灌溉系统的数据处理端。
猜你喜欢
风流一代·青春(2022年7期)2022-07-22
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
现代电子技术(2021年1期)2021-01-17
小学生学习指导(低年级)(2018年11期)2018-12-03
现代电子技术(2018年18期)2018-09-12
电脑知识与技术(2018年35期)2018-02-27
中学生数理化(高中版.高一使用)(2018年1期)2018-02-10
农业与技术(2016年21期)2017-03-06
理科考试研究·高中(2016年10期)2017-01-17
初中生世界·九年级(2016年12期)2017-01-06