一种越野车用轮边永磁电机研制
2020-08-28 17:15杜万亮李勇解德杰吴昊洋陈文鹏
机电信息 2020年24期
杜万亮 李勇 解德杰 吴昊洋 陈文鹏


摘 要:随着电驱动技术研究逐渐深入,整车驱动系统的布置结构也逐渐由单一动力源的集中式驱动向多动力源的分布式驱动发展。与集中式驱动相比,分布式驱动省去了变速器、传动轴、机械差速器、半轴等部件,把电机移动到车轮侧,使传动结构变得更为简单。现针对四轮独立驱动的可翻转轮架车辆,综合小体积、低重量、低噪声、低发热和动态响应要求高的要求,对轮边电机的结构和电磁方案进行优化,充分利用电磁材料以获得良好的综合性能。
关键词:内置式;有限元;磁负荷;轻量化;参数提取;特性设计
0 引言
轮边电机要比集中驱动的电机技术要求更高。轮边电机居于簧下,需要更好的抗震性和密封性,小体积、低重量、低噪声、低发热,使设计难度加大。轮边电机通过控制多个电机来实现驱动和差速,整体技术难度比较高,对电机的动态响应要求高。
本文综合小体积、低重量、低噪声、低发热和动态响应要求高的要求,对电机的结构和电磁方案进行优化,充分利用电磁材料以获得良好的综合性能。
1 电机特性
1.1 整车需求
整车每个轮系配置一台轮边电机,通过控制四个电机来实现整车驱动,整车不带机械差速靠电机独立驱动控制实现各轮的差速控制。轮边电机及减速器装在车轮边上单独驱动相应的车轮,取消了主减速器和差速器,有利于减轻动力传动系统质量,提高传动效率,有利于优化整车的总布置和动力学性能匹配。轮边电机居于簧下,要求有更好的抗振和密封性,小体积、轻量化、低噪声、低发热。
本电机配套的整车为四轮独立驱动的可翻转轮架车辆,为满足全地形高通过性的要求,有原地转向、越野、最高速、越壕、侧倾坡行驶、越障、大坡度爬坡、松软路面和续航里程等基本功能和性能要求。原地转向、越障、越壕、爬坡工况的动力配置需要与车身姿态调节、轮架翻转电机系统、结构设计等相匹配实现。
1.2 整车牵引力计算
1.2.1 牵引力计算的考虑因素
根据整车动力学仿真,在满足大坡度爬坡的要求时整车的牵引力需求最大;而额定功率需要在动力学仿真的基础上综合校核整车的加减速性能、电源系统容量、制动性能和制动电阻的吸收能力确定[1]。
根据车辆行驶动力学理论,车辆行驶阻力主要分为滚动摩擦阻力、坡道阻力、加速阻力和迎风阻力,可表示为:
式中:F为整车牵引力;f为轮胎与地面之间的滚动阻力系数;ms为整车质量;α为坡道角度;δ为等效转动惯量;a为车辆加速度;CD为迎风阻力系数;A为迎风面积;v为车速。
1.2.2 最大牵引力确定
综合考虑整车的质心和整车姿态的调节、电机负荷不均的程度、轮胎在各地面的附着能力,分别进行原地转向所需牵引力和爬坡动力的计算。经计算,满足大爬坡度的要求时电机输出的牵引力需求最大。
1.2.3 功率计算
整车满载3 t下越野速度30 km/h时进行额定功率定额;最大功率按照在最高车速不小于60 km/h的前提下,综合校核整车的加减速性能、电源系统容量、制动性能和制动电阻的吸收能力确定。
2 电机方案设计
综合考虑电机的轴向尺寸限制、重量限制和紧凑化的设计要求,根据参考文献[2-4]进行结构和电磁方案的设计。在采用铝合金和钛合金轻量化材料实现减重的基础上,针对产品过载、低速大转矩的工作特性,采用高磁负荷的电磁方案设计[5]。
2.1 电磁方案
本文基于Ansoft软件的永磁同步电机有限元模型进行电磁场分析[6],准确计算电机的主要参数。基于电机学和有限元的基本原理[7],利用Ansoft有限元分析软件进行主要参数提取和各工况下电机磁负荷校核,采用场路结合的方法进行电机电磁方案设计。
根据尺寸空间的要求,确定外径和轴向长度;根据内置式永磁电机的特点,优选极槽配合、转子外径和气隙大小;结合峰值转矩大、轻量化的要求,采用一字型转子槽型和定子斜槽,便于转子采用钛合金内套以实现轻量化,优化磁钢的宽度和厚度尺寸、优化漏磁和极弧系数以利用磁阻转矩增强过载能力,实现了电磁与结构的优化匹配。
电磁方案相关参数如表1所示。
2.2 方案有限元校核分析
2.2.1 空載反电势分析
在额定转速下进行空载反电势大小、波形和磁场分布的分析,空载反电势正弦度较好,磁密分布比较合理。
2.2.2 额定负载分析
利用Ansoft软件针对额定点进行电流角度和幅值的扫描,确定额定点下的电流幅值和电流角,校核在额定电流和转速下的转矩输出性能,输出转矩较平稳,转矩脉动较小。
2.2.3 过载能力分析
根据弱磁的基本原理[8],在满足电压限制的前提下进行最高速度时峰值功率下的电流幅值和电流角扫描,校核高速下的过载能力。针对峰值转矩进行电流角度和幅值的扫描,确定峰值恒功率起始点下的电流幅值和电流角,校核在峰值电流和对应转速下的转矩输出性能如图1所示,输出转矩较平稳,转矩脉动1.1%。峰值转矩中磁阻转矩的比例高达60%以上。2.2.4 高磁负荷分析
为了实现电机的轻量化和保证电机的转矩输出,需要对峰值转矩输出时电机的磁场饱和情况进行校核。
利用Ansoft有限元软件在一个周期内进行各部磁场分布情况提取,如图2所示。可见,在峰值转矩输出时,电机铁芯各处的磁密分布较高,各最高值在饱和值附近,方案实现了高磁负荷的设计,充分利用了铁芯材料。
2.2.5 其他校核
永磁体抗失磁的校核、全特性范圍的效率校核等。
2.3 电机电磁方案的确定
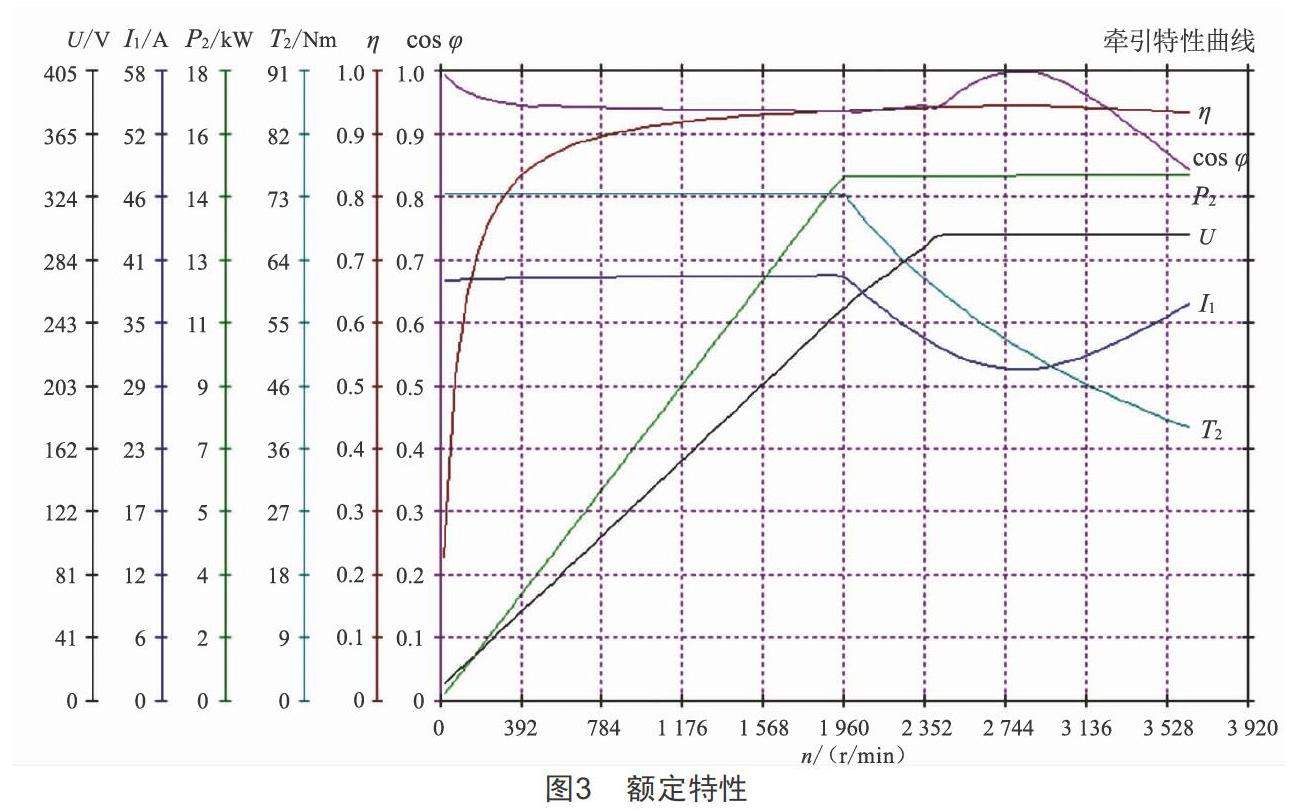
在利用Ansoft进行电机转矩输出分析的基础上,进行计算分析参数的提取,利用程序进行电机的特性分析,电机设计的额定特性输出如图3所示。
3 结构设计
采用带水道、散热效果好的铝合金机座,电缆及旋变线从轴向铝合金端盖输出。传动端花键为40CrNiMo合金钢,转轴及转子内套为钛合金,花键与转轴过盈连接。端盖及盖板安装的配合面上涂有密封胶,端盖带有呼吸阀,免维护自润滑轴承安装接口外侧有接触式密封,防护等级满足IP67要求。
为了实现轻量化和轴承轴向尺寸的合理布置,采用中空转子结构,转子铁芯热套在套筒上,再通过法兰经设计的配合止口与转轴连接。
4 试验结果
本项目进行了样机的试验台测试和型式试验,选取的特征点试验结果与设计值对比情况如表2所示。
5 结语
本文对所研制的轮边电机进行了介绍,研制电机经过了型式试验和装车试验初步考核,验证了电磁方案设计的准确性,通过试验验证,整机性能满足车辆的基本要求。
本项目配套的整车全地面通过性要求高,行走牵引电机的研制需要同车身姿态调节、轮架翻转系统、结构设计等相匹配,还需要深入的试验对电机的性能和系统的匹配性进行评估,同时需要对整车的工况和运行特点进行研究,以更好地优化电机系统性能。
[参考文献]
[1] 马德粮.新能源汽车技术[M].北京:清华大学出版社,2017.
[2] 西南交通大学电机系.牵引电机[M].北京:中国铁道出版社,1980.
[3] 陈世坤.电机设计[M].北京:机械工业出版社,2000.
[4] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[5] 成熹.高磁密异步牵引电机磁路计算方法[J].电力机车与城轨车辆,2010,33(4):15-17.
[6] 侯小全,周光厚,廖毅刚,等.电磁场有限元技术在大型、新型发电机优化设计中的应用[J].东方电机,2010(1):40-49.
[7] 赵博,张洪亮.Ansoft 12在工程电磁场中的应用[M].北京:中国水利水电出版社,2013.
[8] 康劲松,蒋飞,钟再敏,等.电动汽车用永磁同步电机弱磁控制策略综述[J].电源学报,2017,15(1):15-22.
收稿日期:2020-06-16
作者简介:杜万亮(1982—),男,江苏徐州人,硕士,工程师,研究方向:新能源电驱动系统。
猜你喜欢
高教学刊(2022年13期)2022-05-24
中国应急管理科学(2022年2期)2022-05-23
科学与生活(2021年9期)2021-09-01
课程教育研究(2021年10期)2021-04-13
汽车与驾驶维修(维修版)(2019年7期)2019-09-10
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
大陆桥视野·下(2017年8期)2017-09-19