基于准Y源网络的BLDCM换相转矩脉动抑制策略
2020-08-24 11:36周腊吾李飞龙
微特电机 2020年8期
王 辉,周腊吾,陈 宇,李飞龙,郭 浩
(1.长沙理工大学 电气与信息工程学院, 长沙 410114;2.湖北华电西塞山发电有限公司, 黄石 435000)
0 引 言
无刷直流电机(以下简称BLDCM)因其结构简单、运行稳定性高、转矩电流比大、调速性能良好以及效率高等特点,在交通运输和工业控制等领域得到广泛关注[1]。
BLDCM具有独特的结构和控制方式,在运行过程中,电磁反应、电流换相、齿槽效应等因素会产生转矩脉动[2],其中影响最大的是换相过程引起的转矩脉动,一般情况会达到额定转矩的10%~20%,最高可达50%,严重影响BLDCM的正常运行[3]。
工业领域中一般采用PWM控制器对BLDCM调速,Liu Kai等[4]对BLDCM在不同PWM控制方式下的绕组续流过程进行了分析,总结了不同的PWM方式对转矩的影响;王大方等[5]通过对每一相绕组的占空比进行计算,同时对三相绕组进行调制,保证非换相相电流的稳定。也有文献通过调节直流母线电压来抑制换相转矩脉动,Vaiyapuri等[6]将SEPIC (single ended primary inductor converter,单端初级电感式转换器)接在逆变桥输入端来实现非换相相电流的稳定。SEPIC拓扑的升压比较低,同等升压能力下电路损耗更大,温升更高,系统可靠性不高。宁建行等[7]采用双闭环控制系统,将输出转矩实时反馈给转矩比较环节来稳定转矩,但需要对转矩进行实时监测,计算方法复杂。
本文提出一种基于准Y源网络的换相转矩脉动抑制策略,在逆变桥输入端增加准Y源网络,准Y源网络输出电压范围大,具有升压比系数高、电子元件电压应力小等优点,换相期间由准Y源网络提高直流母线电压为电机反电动势的4倍来驱动BLDCM,有效降低换相期间产生的各种转矩脉动。最后对本文系统进行建模仿真验证。
1 BLDCM换相转矩脉动分析
1.1 电机数学模型
假设电机绕组在理想反电动势下对称分布,定子电流和转子磁场对称;忽略电枢反应和齿槽效应;转子空间位置不影响绕组电感变化;磁路不饱和,不计磁滞及涡流损耗[8]。则星型连接方式下的BLDCM等效电路如图1所示。
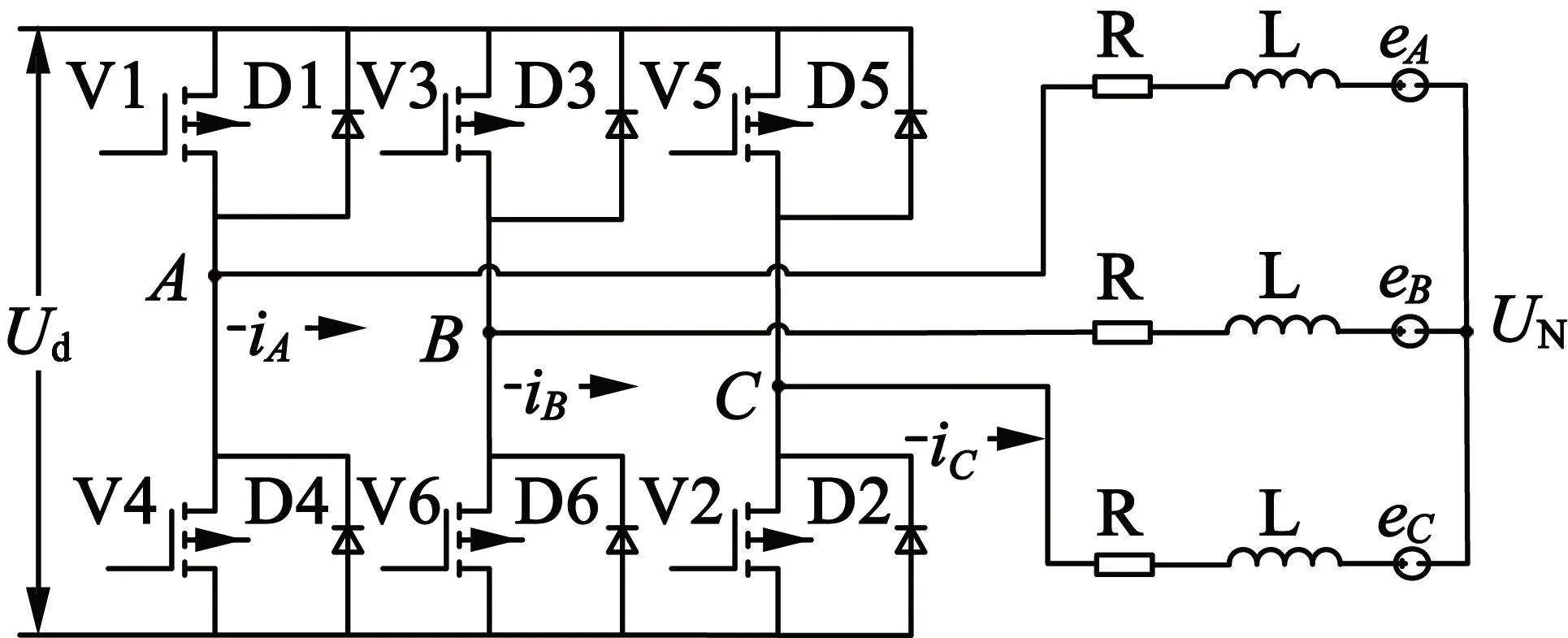
图1 BLDCM等效电路
图1中,三相绕组电流表示为iA,iB,iC;各绕组反电动势表示为eA,eB,eC;UN为电机中性点对地电压;定子绕组的电阻和有效电感分别用R,L表示。换相过程中的电压关系满足:
(1)
式中:uA,uB,uC为各相绕组端电压。
各相绕组间的电流关系满足:
iA+iB+iC=0
(2)
电磁转矩Tem计算式:
(3)
式中:Pem是电磁功率;Ω是机械角速度。
1.2 换相转矩脉动产生原理
当选择两两导通方式控制BLDCM时,逆变桥同一时刻只有不同桥臂上的两个功率管导通形成回路,功率管每次导通120°电角度,每60°换相一次,导通的两相中其中一相关断,另一相悬空的绕组导通,逆变桥在一个周期内通过6种不同开关状态之间的切换来实现BLDCM的换相。
以A相恒导通,B相关断、C相导通为例,对换相过程进行分析,图2为换相过程中电流的变化情况。
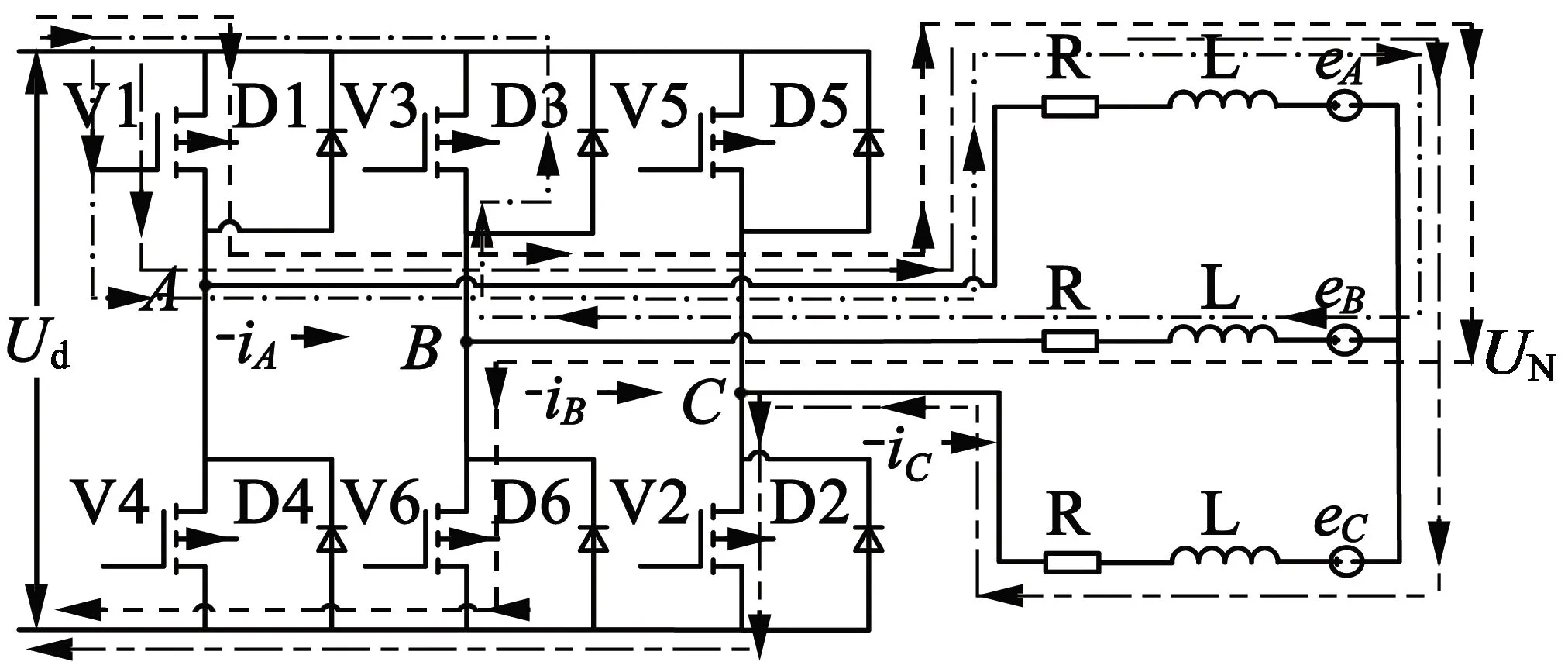
图2 换相过程电流分布图
A、B两相导通时,功率管V1和V6同时导通形成回路,电流从A相流到B相,如图2中虚线所示;进入换相过程后,功率管V6关断,同时功率管V2导通,电流从A相流到C相,实现一次换相,如图2中长短虚线所示。因为BLDCM的绕组为感性负载,绕组电流不能发生突变,所以关断相B相绕组中的电流会经过二极管D3与A相绕组形成回路,如图2中点划线所示;最终B相绕组中的电流下降为0,C相绕组中的电流上升为iC。换相过程中的绕组电流满足:
iA=-(iB+iC)
(4)
若关断相B相绕组中的电流和导通相C相绕组中的电流变化速率不同时,会引起恒导通相A相绕组中的电流波动。
电机换相过程的持续时间是微秒级,因此各相绕组的反电动势基本不变。
eA=-eB=-eC=E
(5)
(6)
式(6)表明,BLDCM在换相期间输出的转矩与恒导通相的电流幅值成比例关系。保证换相期间恒导通相的电流稳定,可以有效抑制BLDCM在换相期间产生的转矩脉动。
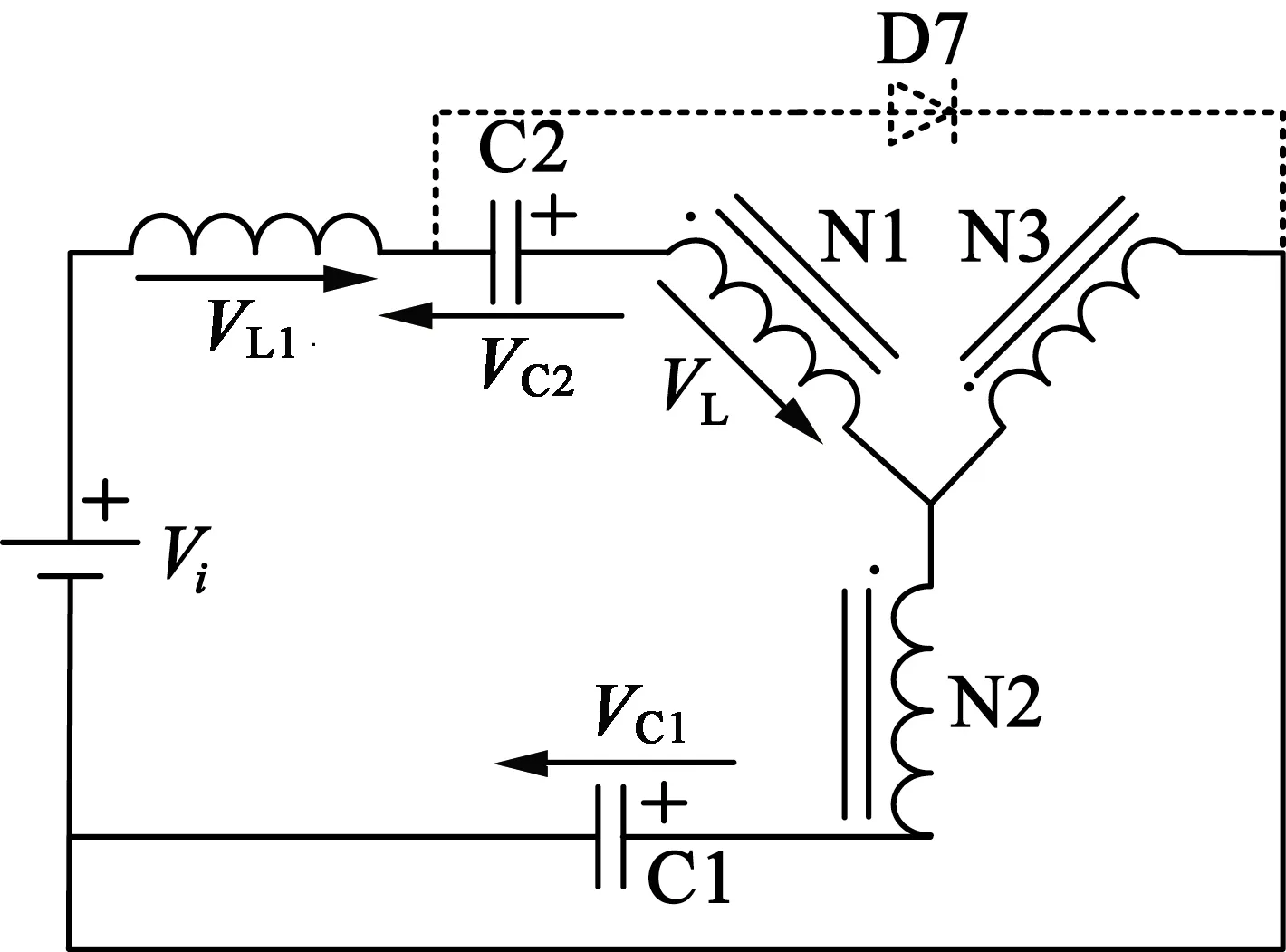
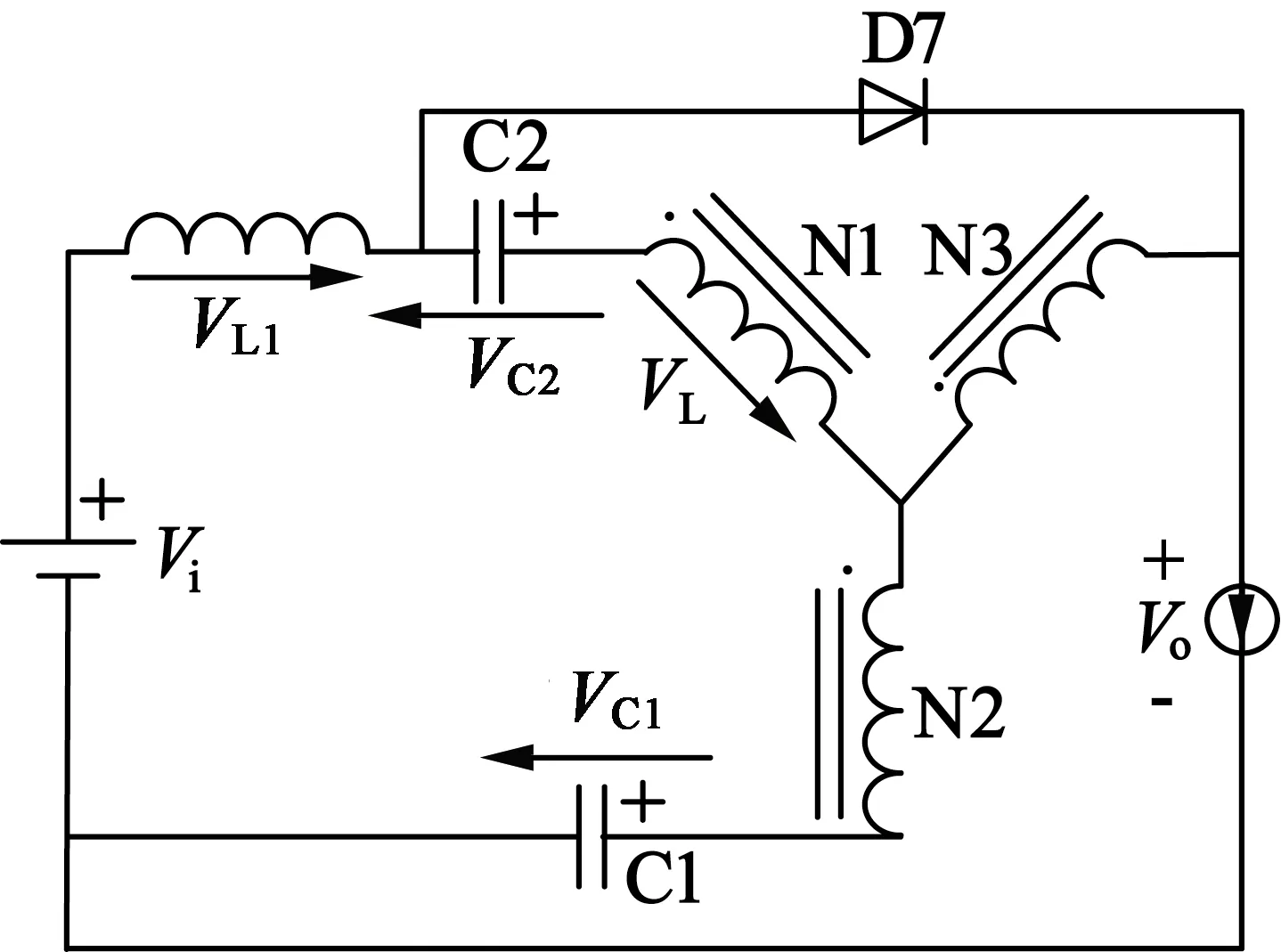
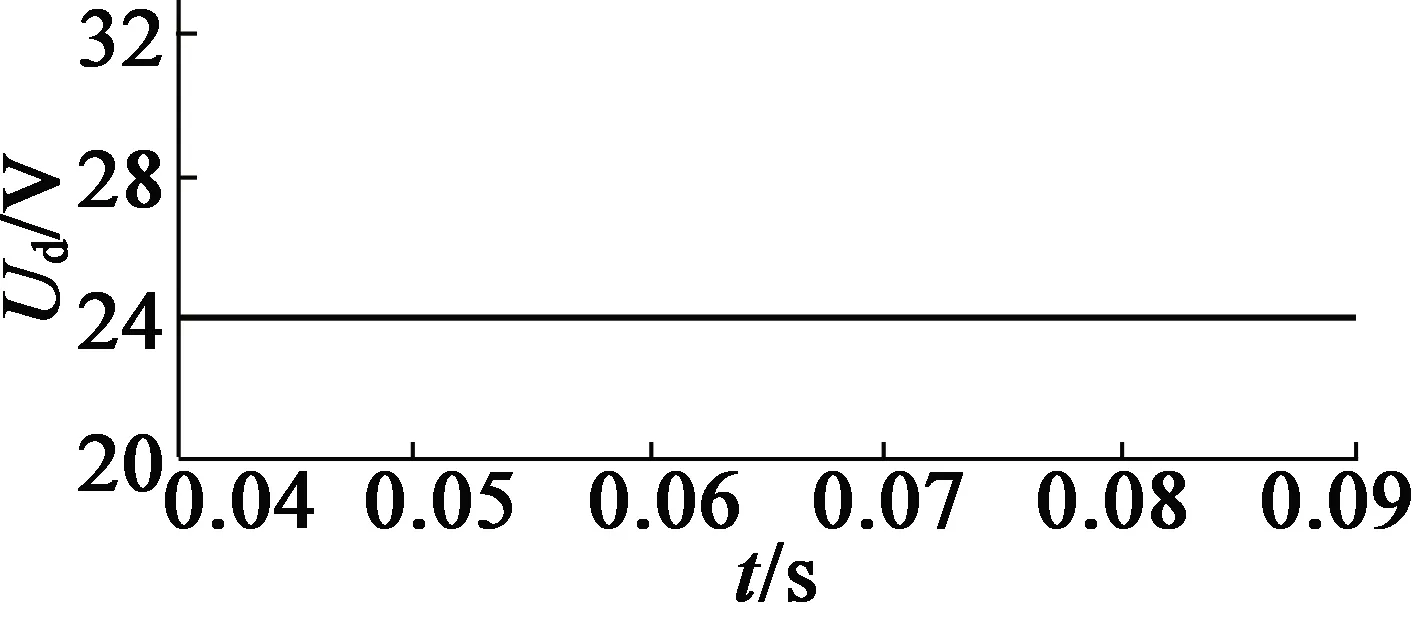
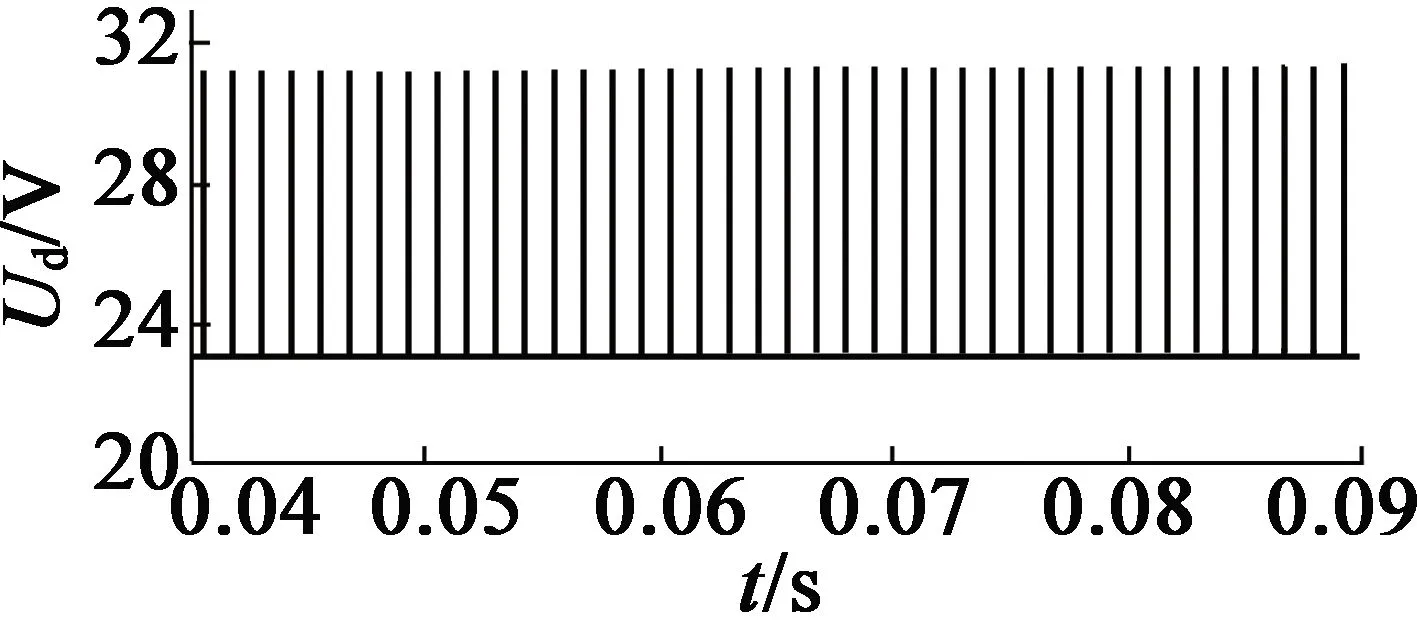
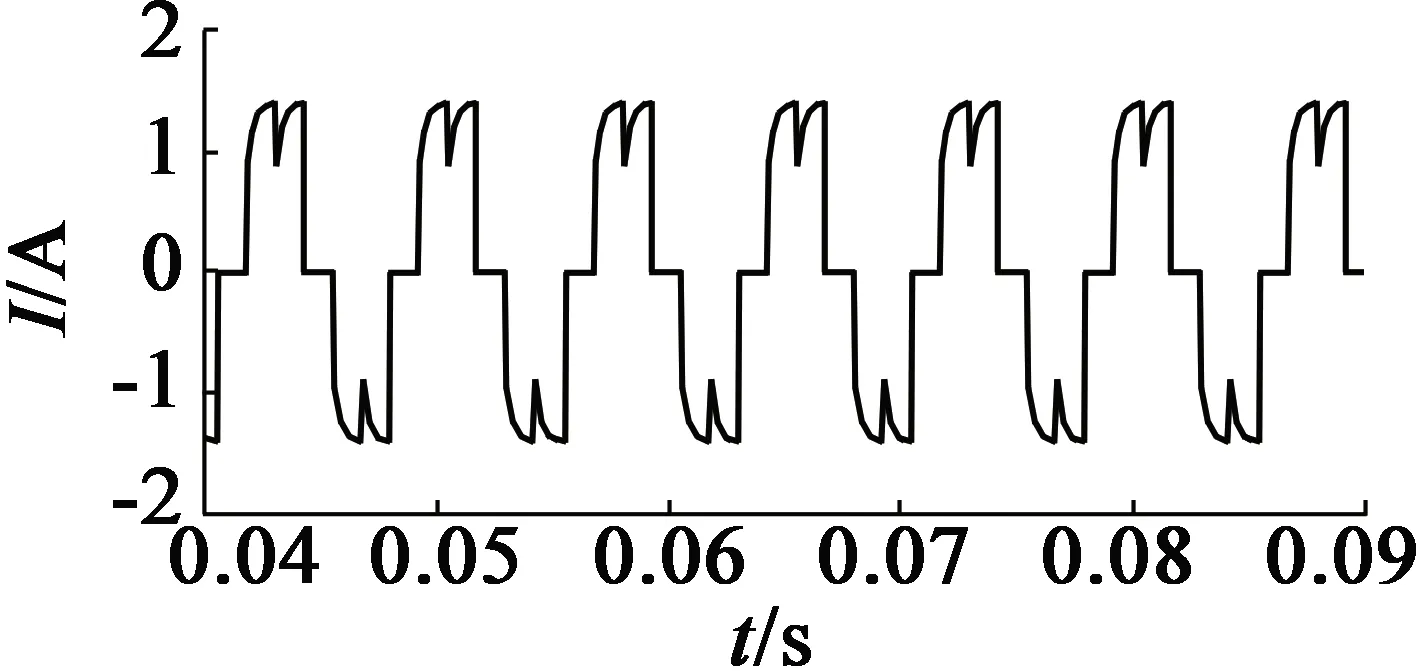
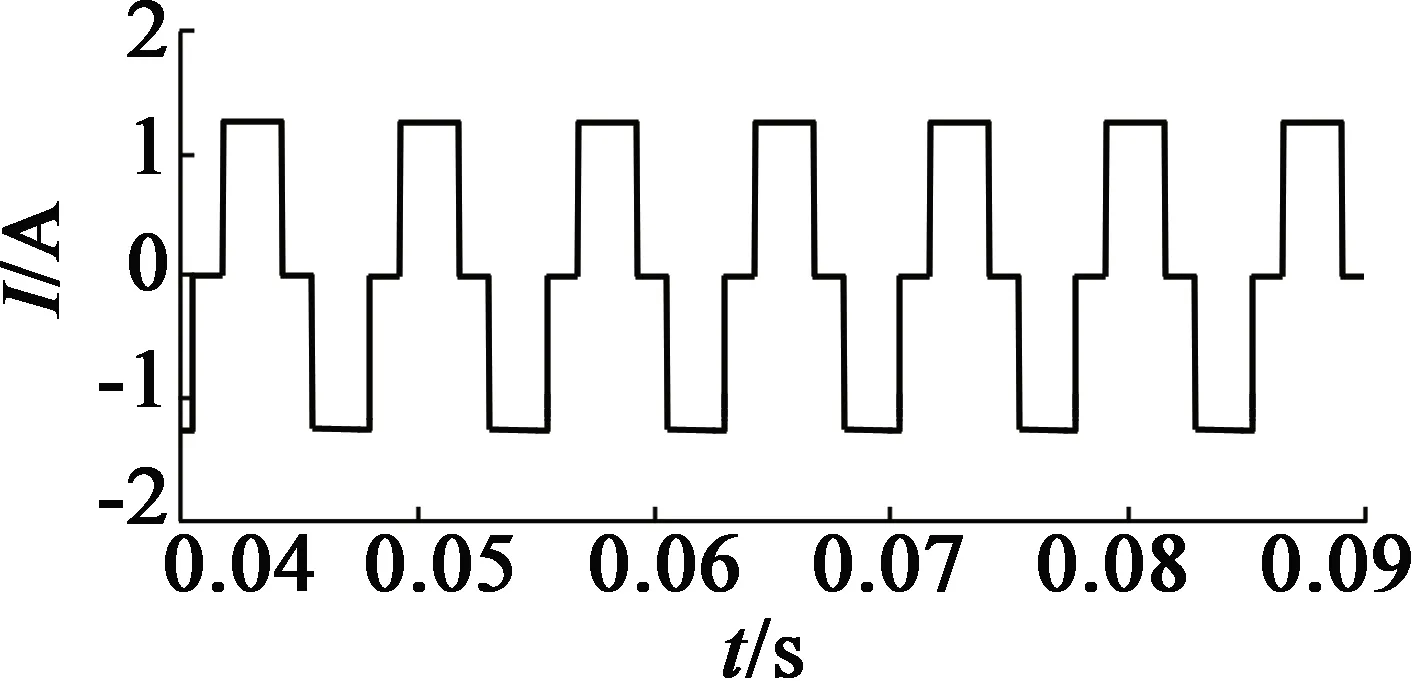
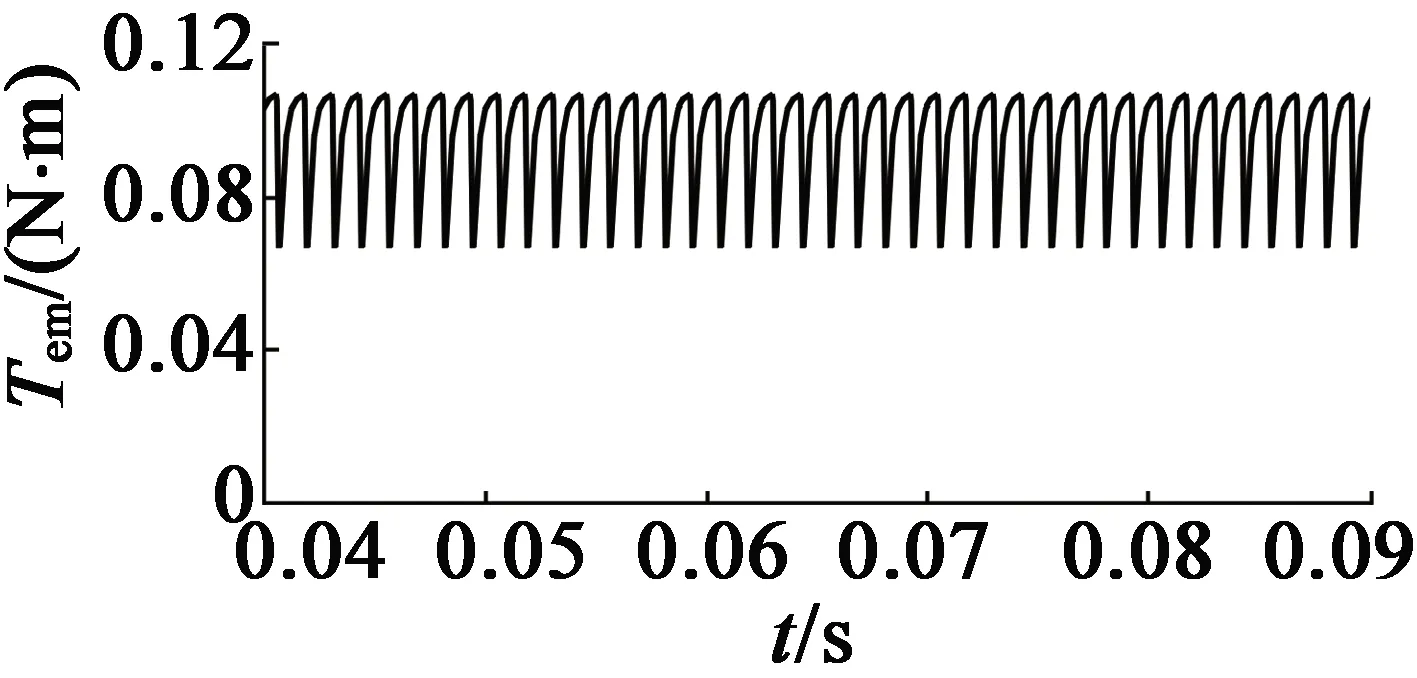
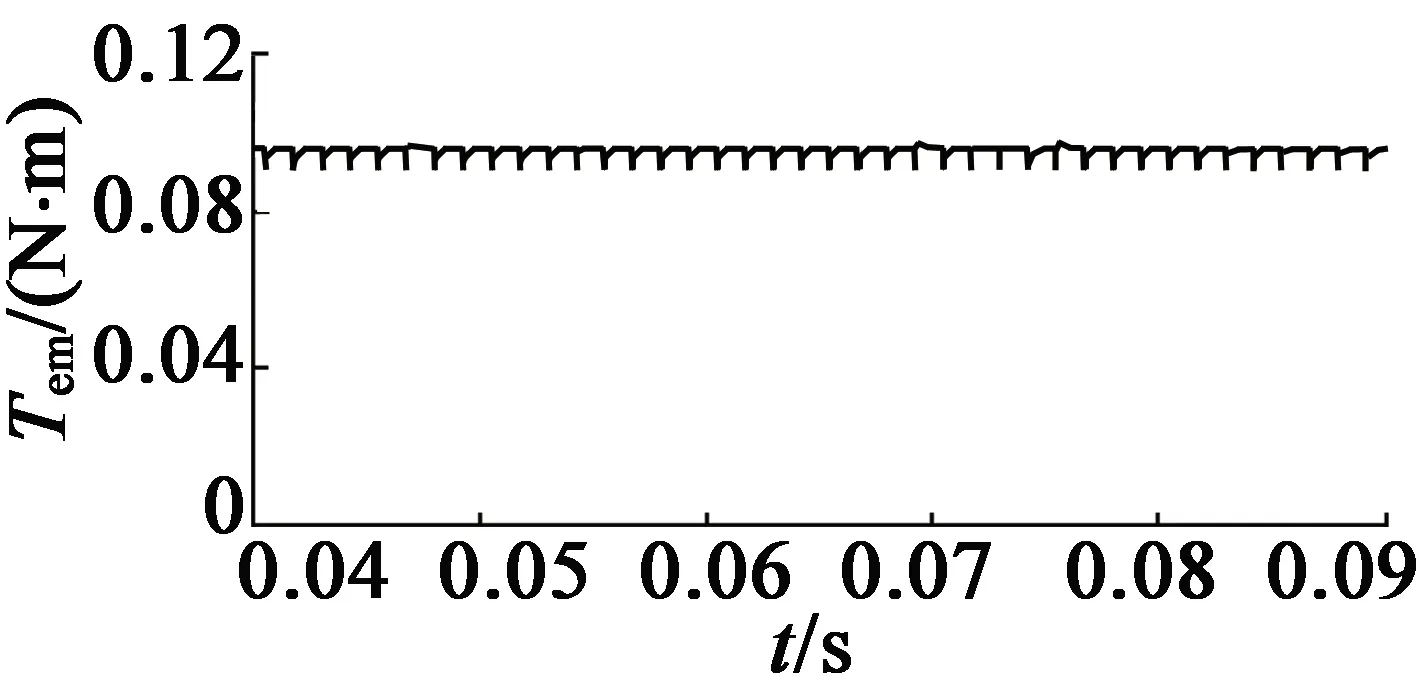
Carlson等[9]曾得出结论,直流母线电压Ud与BLDCM反电动势E之间的关系决定了关断相和导通相之间电流变化速率的关系,如图3所示。当Ud>4E时,tB>tC,如图3(a)所示,恒导通相相电流iA幅值增大,引起转矩升高;当Ud<4E时,tB (a) Ud>4E,tB>tC (b) Ud<4E,tB (c) Ud=4E,tB=tC图3 不同Ud的电流关系 BLDCM转速越高,绕组反电动势越大,当电机需要实现变速运行时,由于Ud是恒定不变的,无法在不同转速的情况下满足Ud=4E,导致产生图3(a)或者图3(b)中的电流波动,产生转矩脉动。所以要想抑制换相转矩脉动,就必须调整到Ud=4E。 本文介绍一种基于准Y源网络的控制策略,控制系统分为直流电源、准Y源网络、开关选择电路、逆变桥及BLDCM。系统主电路如图4所示。 图4 基于准Y源网络的BLDCM电路图 将准Y源网络接在逆变桥输入端,由开关选择电路选择逆变桥电压的输入方式。在BLDCM换相期间,S1断开,S2导通,此时由准Y源网络末端电压向BLDCM提供Ud,调整MOS管V7的直通占空比D可以调节准Y源网络末端的输出电压,能有效降低换相转矩脉动。换相过程结束后,S1导通,S2断开,由直流电源提供母线电压驱动BLDCM。 图4中,电容C3用来稳定准Y源网络末端输出电压,换相前预先调整V7的占空比D来调节准Y源网络的输出电压Vo,和电机反电动势E始终保持Vo=4E的关系来抑制换相转矩脉动。二极管D8的作用是防止在非换相期间,V7导通且Vo低于直流电源电压Vi,S2的二极管导通对Ud造成影响。换相期间Vo可能高于Vi,S1的二极管可能导通,将直流电源接入电路,二极管D9反向串联以防准Y源网络电流流向直流电源。 图5是换相期间准Y源网络的两种模式。 (a) 直通模式 (b) 非直通模式图5 准Y源网络的两种模式 图5(a)为直通模式,MOS管V7导通,逆变桥等效为短路,二极管D7承受反向电压而截止;电容C1通过N2绕组和N3绕组放电,电容C2通过N1绕组放电。电压关系满足: (7) (8) 图5(b)为非直通模式,MOS管V7关断,逆变桥等效为开路,二极管D7正向导通;绕组N1和N3对电容C2充电,电源、电感L1、N1绕组及N2绕组对电容C1充电。电压关系满足: (9) (10) Vi-VL1-Vo=0 (11) 根据N1绕组和电感L1的伏秒特性[10],由式(7)和式(9)可推出式(12),由式(8)和式(10)可推出式(13)。 (12) ⟹VC2=VC1-Vi (13) 由式(12)和式(13)可推出式(14)和式(15)。 (14) (15) 由式(9)、式(11)、式(14)及式(15)可推出准Y源网络末端输出平均电压Vo的表达式: (16) 式中:Δ为耦合电感绕组系数;D为MOS管V7的直通占空比;B为准Y源网络的升压系数,通过调节耦合电感的绕组系数Δ或者直通占空比D能够实现对准Y源网络末端电压的调节,准Y源网络有两个可调参数,在同等升压比的情况下所需的直通占空比更小,升压能力进一步提升。 在MATLAB/Simulink中建模仿真,仿真模型如图6所示,Decoder和Gates模块将转子位置信号转换为功率管开关信号驱动逆变桥实现换相,Decoder1模块根据换相时刻控制开关选择电路。系统仿真参数如表1所示。 表1 系统仿真参数 由24 V直流电源直接驱动BLDCM时,直流母线电压Ud波形如图7所示。准Y源网络升压后的Ud波形如图8所示,母线电压被升至31.2 V,反电动势为8 V,基本满足Ud=4E的情况。 图7 未补偿时直流母线电压 图8 补偿后直流母线电压 图9是24 V直流电源直驱BLDCM的相电流波形。换相期间恒导通相电流的顶部和底部都出现大幅度凹陷,电流波动幅度达到幅值的30%。如图10所示,经过准Y源网络升压后的相电流波形顶部和底部基本保持平稳,表明恒导通相的相电流在换相期间保持稳定,近似理想的相电流波形。 图9 未补偿时相电流 图10 补偿后相电流 图11是在24 V直流电源直驱下的输出转矩波形,从图11中可计算出转矩脉动为20.5%。图12是经过准Y源网络升压后驱动电机时的输出转矩,转矩脉动为3.5%,换相转矩脉动降低了17%。由于换相期间母线电压有所提高,电机的平均母线电压也相应提高,所以电机输出的平均转矩从补偿前的0.088 N·m提高到补偿之后的0.093 N·m,平均输出转矩提高了5.7%。 图11 未补偿时转矩脉动 图12 补偿后转矩脉动 本文针对BLDCM在工作过程中产生的换相转矩脉动,研究了一种基于准Y源网络的控制策略。将准Y源网络接在逆变桥输入端,换相期间由开关选择电路切换准Y源网络控制BLDCM,将准Y源网络末端的输出电压提升至4倍的电机反电动势来驱动BLDCM,可有效抑制换相期间产生的转矩脉动,同时能提高BLDCM的平均输出转矩。 通过仿真验证了该方法的有效性,换相期间升高直流母线电压后,恒导通相的相电流更加平稳,电流几乎没有波动,换相转矩脉动降低了17%,同时将电机输出的平均转矩提高了5.7%。基于准Y源网络的BLDCM控制策略具有更高的升压比,调制范围更广,提高了无刷直流电机的稳定性,具有广泛的应用前景。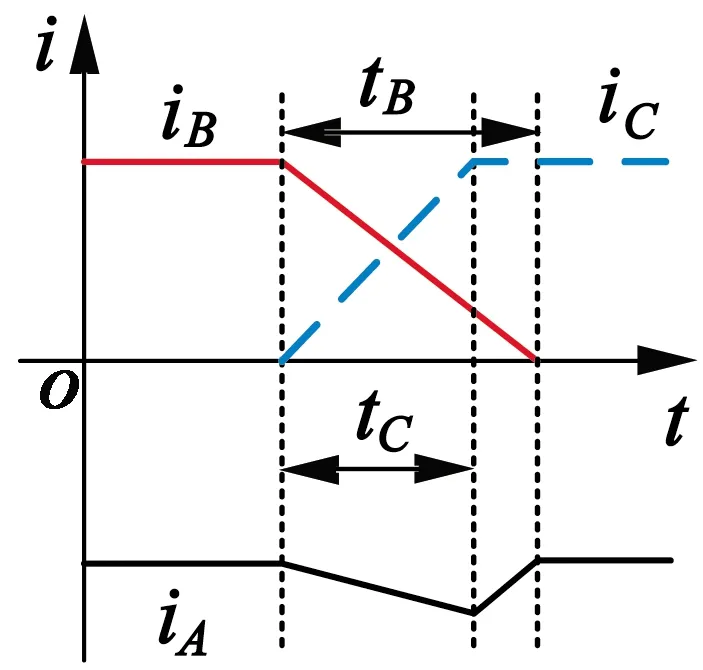


2 基于准Y源网络的控制策略
2.1 准Y源网络控制电路结构

2.2 准Y源网络的模式分析
3 系统仿真分析

4 结 语
猜你喜欢
电工技术学报(2022年20期)2022-10-29微电机(2022年8期)2022-10-12重庆理工大学学报(自然科学)(2022年5期)2022-06-18微电机(2022年1期)2022-03-21科技信息·学术版(2021年7期)2021-01-10煤矿机电(2020年5期)2020-11-02汽车电器(2019年2期)2019-03-22课程教育研究·学法教法研究(2018年20期)2018-08-11科学与财富(2017年30期)2018-01-01科教导刊·电子版(2017年16期)2017-07-21