
一体式乒乓球发球机器人设计
2020-08-21 17:20冯中澳赵利达
设计 2020年15期
冯中澳 赵利达

摘要:设计一款发射方式多样、自动化程度高、便携性高的智能式乒乓球发球机器人。对其进行机械结构设计,包括机构运动设计、零件结构设计,并使用inventor进行机械零件、部件设计及模拟装配。围绕预期目的对不同的机构进行组合创新,完成设计。该机器人可以很好地模拟專业乒乓球训练人员,使用便携高效。
关键词:乒乓球 ;发球机器人 ;陪练机器人; 发球机构 ;模块化设计
中图分类号:TB47
文献标识码:A
文章编号:1003-0069(2020)08-0014-04
引言
随着人们生活水平的提高,人们对生活质量的要求越来越高,更加注重自身运动,通过运动来强身健体、陶冶情操、缓解压力、锻炼意志力。因此,运动消费作为一种绿色的消费,在人们日常消费中所占的比例越来越大。乒乓球作为一项全民共享的健身运动,有着广泛的群众基础。学好乒乓球也许不是一朝一夕的事,对于初学者来说,捡球的时间要比练球的时间常,这样往往会挫伤初学者的兴趣,而对于专业人员来说,陪练者也不可能长时间地发球,专业人员进行大强度的专业训练也是较为困难的,对于这一问题,我们可以引进乒乓球自动发球机,因此,面对乒乓球自动发球机的普及使用,要求乒乓球自动发球机既能满足初学者的使用要求,又能为专业的乒乓球员提供更好的服务。虽然目前乒乓球发球机器人已经得到了一定的发展,能够实现一定的变频变速和旋转等功能,但是随着乒乓球这门运动的普及,人们对乒乓球发射机器人的要求越来越高,目前市面上的乒乓球发射机越来越难以满足人们的需求。因此市场急需一种多样化智能化的乒乓球训练机器人。
一、项目意义
针对我国乒乓球市场的需求,我方设计的一种智能式乒乓球发球机器人具有发射多样化、自动化程度高、便捷性高等特点。
该机器人是一种特殊的乒乓球发球机器人,其特殊性在于:
1.在现有乒乓球发射机上进行了改进,使装置实现多级变频变速发射和多种发射球性的功能。
2.多维度发射模式,使装置能够在任意发球口进行发射乒乓球,能够更好地模拟专业乒乓球训练人员。
3.便携式腿部和自动撑伞设计使机器人灵活移动,快速方便地切换与任意乒乓球桌,具有较高的便捷性。
4.采用新型控制系统和深度学习算法,能够有效准确而控制发球频率、速度、球性、位置,帮助训练员快速提高发球水平。
因此该乒乓球发球机器人具有广泛的应用前景。
二、项目研究内容
经过调研后并综合考虑应用场景和功能需求后,初步确定机器人试下功能有变频变速发射、多维度发射、智能行走和收集等功能。
现有乒乓球发球机已具有变频变速功能,基于此该机器人进行了改进,使乒乓球发射具有更好的发射性能;为了更好地模拟发球特性,该机器人在角度调节的基础上增加了变位功能,使其发射口能够高低左右变化,能实现专业训练员任意发射位置进行发射;同时,不同于普通发球机,该机器人具有储球和送球功能;为了使机器人能够灵活切换乒乓球桌,该机器人具有行走功能以准确定位到乒乓球桌,自动开伞收伞功能能够自动开伞和收伞去掉了人工开伞环节,增加了该装置的便捷性。
三、原理及设计
(一)整体设计
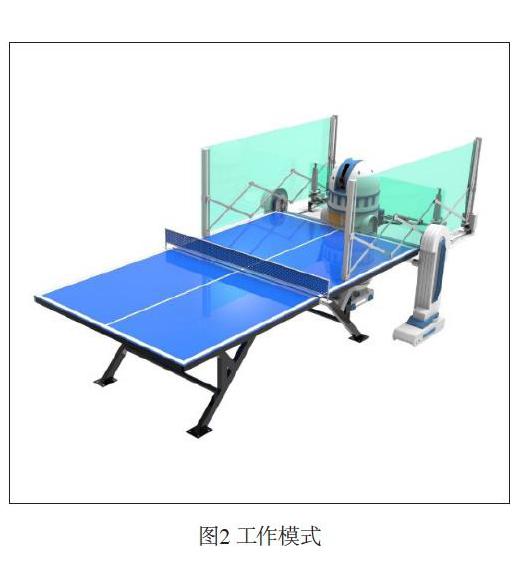
该机器人整体结构如图1所示:
为了实现多维度多方位发射和智能行走等功能,机器人整体从功能进行分类,可分为发射模块、角度调节模块、变位移动模块、储球模块、收集模块、行走模块。
其中,发射模块由多级摩擦轮机构组成,通过电机驱动及变位齿轮传动实现发球的变速变位功能;变角度模块是由俯仰机构和横摆机构组成,两个装置分别实现发射口沿y轴和z轴旋转的功能;变位移动模块中横移装置和伸缩装置能调节从z轴和y轴分别调节发射口;储球模块中通过自传式储球舱、抬升装置和装夹机械手配合使用实现装置储球和运球的功能;收集模块由自动收集伞组成,该模块能够实现对乒乓球的拦阻,并通过高度差将拦阻后的乒乓球运送至收集舱中。行走模块主要由行走装置组成使装置具有智能行走的功能,如图3、4。
根据现有的乒乓球桌的尺寸可以知道,其长度为2740mm,宽度为1525mm,高度为760mm。
所以根据乒乓球桌尺寸我们设计的乒乓球发射机器人的发球口距地面高度为1076mm,整体高度为1300mm,同时为了满足机器人在横向移动时能够覆盖整个乒乓球桌,其横向展开尺寸为1830mm。为了保证机器人的收集模块能够覆盖整个桌面且保证尺寸尽可能小,其前后尺寸为500mm。
(二)发射模块:
发射模块主要由电机驱动,两级摩擦轮组加速机构,传动变速机构,发射管x轴转动机构组成。
1.多级摩擦轮组发射机构,如图5所示:为了实现了球速及球性的控制,我方设计了二级摩擦轮加速调节机构。其中一级摩擦轮直径d1为30mm,通过高速直流电机直接带动,设计旋转特性为高转速,高平稳性。主要负责对球进行加速,增加其初速度,上下两摩擦轮1-2保持相同转速∞,其加速后初速度值为:
V1=wXd/2
第二级摩擦轮直径d2为40mm,由第一级摩擦轮间接变速传动而来。设计旋转特性为高转速,高变频。第二级摩擦轮过控制上下摩擦轮的转速不同,对由第一级过来的球添加球性,实现旋球。当第一二级摩擦轮上下轮3-4转速w3=w4时,乒乓球不旋转,最终发射速度为:
v=c1Xd2/2
当两级摩擦轮转速w3》∞4,球获得向轮3的旋向,当w3《∞4,球获得相反方向的旋向,以上两种情况球的最终发射素的均为:
v=(w3+∞4)xd2/4
2.传动变速机构,如图6所示:传动变速机构主要由锥齿轮、皮带轮以及凸轮摆杆变速机构组成,共两套分别对称分布在发球管两侧,分别负责上下摩擦轮2-3、1-4之间的传动。
以单侧传动机构为例,电机带动轮1轴输出动力,经过锥齿轮传递给皮带轮,带动凸轮摆杆变速机构。其中锥齿轮的传动比为1:1,皮带轮的传动比为1:2。
凸轮摆杆变速机构主要由输入输出轴、行星齿轮传动、三个凸轮、三个摆杆、三个弧形压板槽以及超越离合器组成,组成相互独立的三组凸轮摆杆机构。三个凸轮间隔的装在凸轮轴上对应三个摆杆。
凸轮摆杆无极变速机构可通过调节摆杆的轴向相对位置实现无级变速,体积小、零件少、结构精巧,传动较为精确,能较好实现两级摩擦轮之间传动的无级变速。
凸轮摆杆无级变速机构输出动力后再经过皮带轮锥齿轮传动,将动力输入轮4。通过两侧传动装置改变不同的传动比,实现摩擦轮3、4的差速旋转。
3.发射管x轴转动机构,如图7、8所示:通过电机齿轮带动位于发射管根部的齿轮,实现整个发射管沿着x轴旋转。通过发射管的x轴转向,配合摩擦轮3、4的差速旋转,可以发射任何旋向旋球,更好地控制球性。
发射管截面直径稍大于乒乓球,内设四条轴向的导轨,乒乓球不直接与管壁接触,降低了乒乓球在管中运动过程中因摩擦带来的能量损失,同时也减少了筒壁对旋球的不利影响。
(三)角度调节模块
角度调节模块由俯仰调节装置和横摆调节装置组成。
1.俯仰调节装置,如图9所示:为了实现发射口的俯仰调节功能,该装置运用导杆机构,以电机为输出动力,通过齿轮组减速,带动曲柄旋转使固连于导杆末端的发射台绕轴旋转。
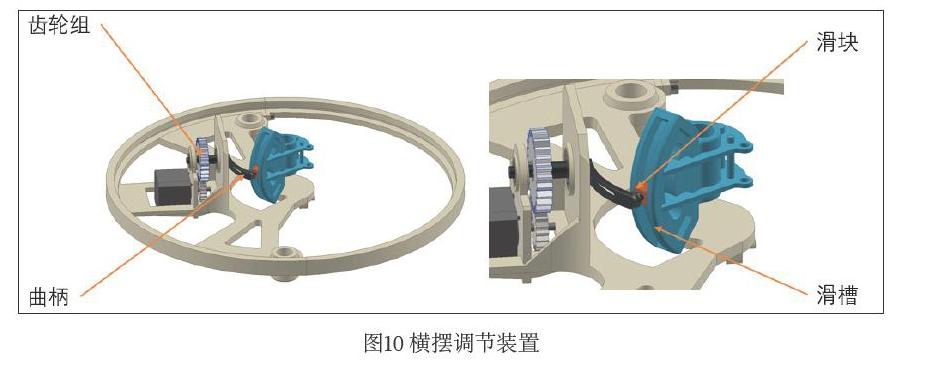
2.横摆调节装置,如图10、11所示:横摆装置运用了空间曲柄滑块机构,通过曲柄旋转带动滑块沿滑槽运动,使滑槽沿轴旋转,与滑槽固定连接的上层装置在滑槽的带动下沿轴摆动。同时安装一对减速齿轮使该机构减速增矩以承接上层发射口的重量。
(四)变位模块
变位模块主要由伸缩装置和横移装置组成,伸缩装置运用曲柄滑块机构实现发射口在不同高度发射的功能;横移装置可以实现发射口沿左右两侧运动,两个装置配合使用实现装置不同发射口发射任意乒乓器的功能。
1.伸缩装置,如图12、13所示:伸缩装置运用曲柄滑块机构,在电机驱动下通过齿轮减速增矩后,曲柄带动滑块沿直线往复运动,实现装置的伸缩功能。
当机器人处于初始状态时,发射口距桌面的高度为360mm,当机器人头部抬升到最大高度时,发射口距桌面高度为480mm,所以曲柄的長度为60mm。
2.横移装置,如图14所示:横移装置主要由导轨部分、夹紧部分和移动部分组成;
导轨部分:横移装置中一共三段导轨,中间为固定端,两侧导轨与中间端成铰链连接,各导轨均安装齿条。两侧导轨末端与双腿通过滑块连接,滑块上端与导轨末端铰接。导轨中部通过气弹簧与身体连接。
夹紧部分:夹紧部分采用双滑块机构,电机带动丝杠旋转,使滑块沿直线运动,两侧滑块沿中心运动,带动机械爪向中间合拢固定导轨。
移动部分:移动部分通过电机驱动齿轮组传动,滑台两侧的滑动轮与中间导轨相接起到限位的作用,移动平台上端与机器人发射头相接,通过齿轮齿条机构实现装置的快速移动。
横移装置工作时,机器人双腿沿左右两侧行走,两侧导轨沿铰链旋转展开,与中间导轨拼接,夹紧部分夹紧导轨末端,固定导轨,气弹簧伸缩从下侧固定导轨,从移动部分中的齿轮与导轨中的齿条啮合,通过点击带动齿轮旋转,使移动部分沿导轨直线运动实现装置横向移动。
(五)储球模块
储球模块主要由旋转式储球筒、旋转装置、抬升装置和夹紧装置组成,如图15所示;
储球模块一共三个储球筒均位于定角度旋转装置之上,当机器人开始运动时,旋转装置将储球模块旋转至抬升装置之下,抬升装置工作将储球筒送至发射模块下部,夹紧装置将装夹手装夹于储球筒两侧,使储球筒固定,开始松送球,如图16。
1.环形储球筒,如图17所示:储球筒中乒乓球储存于子储球筒中,通过丝杠传动使抬升座向上抬升是实现乒乓球的运输,当子储球口送球完毕后,电机带动蜗轮蜗杆使槽轮机构工作,使固连在槽轮机构上的子储球筒旋转,进入下一储球口。
2.旋转轮换装置:旋转轮换装置主要由槽轮机构和曲柄滑块机构组成,环形储球筒放置于轮换装置之上。通过槽轮机构3个环形储球筒以60度方位旋转。为了使储球筒稳定连接,通过电机带动曲柄滑块固定储球筒。
三个收集桶等角度分布在同一圆周上,所以槽轮径向槽之间的夹角为120°。结合整体尺寸,得到槽轮机构中心距为88mm,槽盘半径为72.5mm,曲柄销长度为90mm,径向槽的长度为39mm,曲柄销半径为11.8mm,如图18所示。
3.抬升装置运用剪叉机构,剪叉机构由电机输入动力,电机旋转使丝杆带动滑块移动,与滑块铰接的连杆同时向上旋转,使储球筒向上抬升。
4.夹紧装置安装于机器人上端,使旋转式储球舱抬升后固定,该装置采用双滑块机构,滑块向内运动带动夹手夹紧储球舱,如图19。
(六)收集模块
收集模块一共由三级展开装置组成,展开伞展开后,对乒乓球台收拢以阻拦回击后的乒乓球,如图20所示。
一级展开装置,如图21所示。一级展开装置由两节连杆组成,通过电动推杆推动,使连杆绕轴旋转至于平台平行的位置,一级展开装置随后展开,与装置末端的阻拦网随其绷直,一级展开装置具有两个自由度,能够灵活控制连杆的旋向,使装置准确展开。
二级展开装置,如图22所示。二级展开装置功能由剪叉机构实现,通过电机带动丝杠旋转,使滑块沿直线运动,剪叉机构随及展开。
三级展开装置。三级展开装置由舵机控制,使连接杆绕轴旋转至水平向下。三级展开装置展开后,收集网最终打开。同时由于三级展开装置的连接网倾斜放置,阻拦后的乒乓球,被收集网阻拦后沿倾斜轨道向下滚动至收集轨道中,并通过收集轨道进入储球舱中,完成收集。
乒乓球桌的长度为2740mm,宽度为1525mm,所以当收集机构展开是其长度应至少等于1370mm,宽度为1525mm。同时为了保证当收集机构展开时乒乓球不会落入缝隙中,则收集机构与乒乓球桌在长度和宽度的缝隙应小于乒乓球直径,同时为了保证乒乓球弹起时不会弹出界外,取收集模块的高度z为500mm。则收集机构长度为1400mm,宽度为1550mm。
(七)行走模块
为了使机器人能够灵活移动,本装置增加了行走模块,该模块主要分为直行装置和转向装置和定位装置,如图23。
直行装置,如图24、25所示。该装置通过二级传动实现直行的功能,电机通过锥齿轮传动,带动同轴的直齿轮旋转,与小齿轮啮合的大齿轮带动车路做旋转运动。通过二级减速后,该装置获得較大扭矩。
转向装置,如图26所示。转向装置通过齿轮组传动,大齿轮与直行装置固连,小齿轮带动大齿轮旋转,实现转向。
四、整体创新点
(一)功能创新:采用无极变速器实现发球速度的连续变化,能够分别应用于不同状态的发球训练。采用曲柄连杆机构实现发球机构的高度变化以适应不同状态的发球训练。采用齿轮齿条机构实现发射模块的横向移动已适应不同状态的发球训练。顶端作为搭载传感器的平台,通过主轴的旋转运动,达到全方面检测的目的。该机器人还搭载视频采集系统,通过视频的采集及传输,通过专业的软件系统分析发球状态实现多种状态的发球。
(二)结构创新点:角度俯仰调节机构:导杆机构,通过导杆机构实现发球模块的纵向角度调节使发球灵活多样。发球模块摇摆机构:通过空间曲柄滑块机构带动发球模块实现横向角度调节,实现了在横向上的多角度发射。收集机构:通过电动推杆,剪叉机构和舵机反转杆实现了对乒乓球的无缝收集。
结语
通过对机构的创新设计,该机器人拥有多种角度调节发射模式,功能多样,能应用于各种不同的场景,能适用于不同年龄段和不同水平的人群训练,具有广阔的市场前景。装置整体设计人性化:装置功能完备,可有效减少人手操作步骤,降低工作强度;装置适用性强:可适应不同的训练环境,适应不同年龄段和不同训练水平的人群;可推广性强:装置原理简单,各构件成本较低,与现有的乒乓球机器人相比,功能更为齐全,便于推广。
参考文献
[1]张行,石晶,丁华锋,朱银新型自主乒乓球收集机器人设计研发[J].机械研究与应用,2019,32(05):143-145.
[2]聂志强,体育运动辅助训练机器人技术的研究现状与应用展望[J].运动,2019(03):136-138.
[3]宋安琦,李红楠,申立佳,李晶,方莹,贾涵中智能乒乓球拾取机器人设计[J].科技创新导报,2018,15(36):2-4.
[4]侯明曦,李国权,郑凯,史妍妍,苏壮.一轴多附件齿轮传动的设计与分析[J].航空科学技术,2020,31(06):55-6[J].
[5]汪珺,王勇,张春鹏,刘罡,徐斌乒乓球机器人击球装置的设计与研究[J].牡丹江大学学报,2016,25(10):134-137.
[6]唐增宝,常建娥.机械设计课程设计第3版[M]武汉:华中科技大学,2006.
猜你喜欢
小学阅读指南·低年级版(2017年6期)2017-06-12
山东工业技术(2016年24期)2017-01-12
科技视界(2016年24期)2016-10-11
小猕猴智力画刊(2016年5期)2016-05-14
电脑知识与技术(2016年1期)2016-03-22
小猕猴学习画刊(2015年2期)2015-01-22
