
助力老年人行走机器人设计
2020-08-21 17:20江可玥邱煜焜
设计 2020年15期
关键词:机器人
江可玥 邱煜焜


摘要:随着我国老龄化速度不断加快,老龄化所带来的社会问题也日益显著,老年人的身体状况不容乐观。如何有效帮助老人在家的生活成了重要问题。我们通过对行动能力不便的老年人进行调研,针对老年人行走不便的原因进行分析,设计了一种助力老年人行走的机器人,为老人在家庭生活中提供帮助。各个模块协调运行,帮助老年人,特别是行动不便的老年,人顺利进行日常生活。该机器人可以为行动不便的老年,人提供便利。
关键词:辅助行走; 机器人; 服务机械
中图分类号:TB472
文献标识码:A
文章编号:1003-0069(2020)08-0008-03
引言
在人口老龄化的趋势下,老龄化所带来的社会问题也日益显著。老年人身体状况不容乐观:各项身体机能逐渐退化,血液流通不畅等引起的腿脚无力,行走等能力受到限制,起身站立困难,无法进行长距离行走。而年轻人的就业竞争和工作压力大,工作和家庭兼顾已然不易,并无过多时间和精力照顾老人,由此极易导致老年人能力不足引发的一系列危险状况:行动缓慢,对潜在危险不能及时做出反应;且容易跌倒,引发事故。
针对此种状况,国内市场推出了老人站立助力器,辅助老年人起身站立,短距离行走,但功能单一,自动化程度极低,无法满足老年人正常生活所需;日本丰田则推出Honda步行辅助器,实现自动化辅助行走,但同样功能单一,无法对突发情况迅速做出反应,为老年人保驾护航。对于这一问题,我们设计了一款助力老年行走机器人-Accompany spider,为老年人的家庭生活提供帮助。
一、功能设计
本装置主要针对行动不便的老年人,尤其是腿部不能长时间站立、行走或是因为行走费力而导致行动能力减弱的老年人。如图1位本设计整体模型图,其具备的主要功能有以下三点:
1.提供助力行走服务,全方位监控护航,设置避障自适应功能,当遇到危险时,及时采取措施,避免老人倾倒;也可提供自动前进功能,老人可坐在座椅上自动前进,舒适感更强;
2.提供日常生活取物递送服务,方便老年人日常生活;
3.提供按摩服务等辅助功能,针对老年人不同的身体状况,提供不同类型的服务,更具人性化。
二、项目内容
(一)整体设计
Accompany spider助力老年行走机器人采用了模块化功能的设计,整体由腿部支撑模块,多功能机械臂模块,多足行走模块,按摩模块,底部支撑模块和控制检测模块六大模块组成。本装置主要针对行动不便的老年人,尤其是腿部不能长时间站立、行走或是因为行走费力而导致行动能力减弱的老年人。
由于人在行走时会将自身的重力全部集中在人的两只腿上,从而导致人在行走时腿部承力较大,尤其是在人下蹲或是起身时膝盖部分所受的力为正常走路时的5-7倍,因此许多老年人随着年龄增长行动能力减弱的一个重要原因是膝盖不能承力,因此本装置为方便老年人行走,设置了腿部支撑模块,当老年人在行走时,依靠装置上的座椅承受部分身体的重力,通过仿人腿式支撑模块的设计,在减小人腿受力的同时增加老人在行走时的平稳性。
除两条仿人腿式机械支撑腿外,本装置还设有两只多功能机械臂,这两只机械臂在老人行走时将老人围住,防止老年,人在行走过程中摔倒;在老年人需要取物时可通过老人的手动控制辅助老年人拿取书报、食物等物品,避免了老人屈膝取物的动作,保护了老年人的膝盖。除此之外该机械手具有按摩的功能,当老年人在行走过后,为缓解其腿部肌肉的酸痛,机械臂将通过控制系统根据老年人行走的距离、路况等信息综合考虑为老年人进行科学地按摩。
由于路况复杂,老年人只靠两条腿行走势必会导致行动的平稳性较差,因此,本装置设置了多足可吸附式结构,该结构仿造蜘蛛的行走过程设计,在行走时针对不同的路况通过高清摄像头智能识别路况,从而选择不同的行走方式,多足式设计使得装置在辅助老年人行走的过程中平稳性得到大大提高。
(二)腿部支撑模块设计
如图2所示为腿部支撑模块总装图,其由电机、传动齿轮、固定卡扣、气动杆等部分组成,为了和人体下肢运动关节基本一致,下肢外骨骼机构运动主要包括髋关节的三个自由度转动、膝关节一个自由度转动的和踝关节的三个自由度转动。本模块为适应不同人群的腿部长度和粗细,设计了可伸缩式支撑架,该支撑架由电机提供动力,主要实现以下功能:1.使膝关节以下部分的长度可随不同人体的小腿长度而自动变化;2.由于人体脚掌的面积较小,因此脚掌所承受的人体自身中立多带来的压强较大,因此本装置设计了机械脚掌以增大脚掌受力面积;3.通过电机带动滚珠丝杠实现腿粗细的调节;4.由电机带动万向节,实现脚部模块的旋转,从而对老年人脚踝关节进行按摩。
(三)多功能机械臂模块设计
如图4所示为多功能机械臂模块,该模块由大臂和小臂两部分组成,其中小臂由两部分气动杆提供动力,通过控制系统对不同部位气动杆的伸长长度来控制多功能机械臂小臂部分的长度和手指部分不同功能的实现。其中,手指部分利用多自由度差动驱动原理与弹性铰链的巧妙结合,使设计手掌仅由一个原动件便可驱动手的所有15个关节,并且有对抓取物体的自适应性。手掌设计了15自由度差动机构,驱动手指的3个关节,实现对抓取物体的自适应性。
随着老年人年龄的增长,由于肌肉组织的退化或其他问题将导致老年人在行走过程中重心不稳而摔倒,针对这一老年人在行走过程中普遍存在的问题,本装置利用该多功能机械臂作为老年人行走过程中的防护装置,在老年人行走时通过弯曲小臂,使小臂与大臂之间成90°角,将老年人围在其中,降低老年人摔倒的可能性。同時,转化为轮椅形态时,机械臂作为驱动力来源,转动轮椅轮前进。
除此之外,当老年人行走一段时间后,可能会出现腿酸等症状,针对这一问题,本模块设计利用多功能机械臂小臂的手指部分,如图5,对老年人的腿部进行适当按压,缓解老年人行走过后的疲劳程度。
(四)变形多足行走模块设计
为适应瓷砖等光滑路面、不平整路面下的行走,本装置采用两种不同的行走模式,对于瓷砖等光滑路面和楼梯采用吸盘吸附式行走,增大抓地面积,提高装置平稳性;对于普通路面采用轮系结构模式,提高行走效率。两种行走模式依靠于下列脚尖组合结构。该结构主要由吸盘机构、锁扣机构、旋转机构组成。整体装置由四个变形多足行走模块组成,两个行走模块通过控制旋转耦合,可以合并为行进轮,从而使装置变成轮椅模式。整体效果图如图6所示,以下是对这些机构的具体分析。
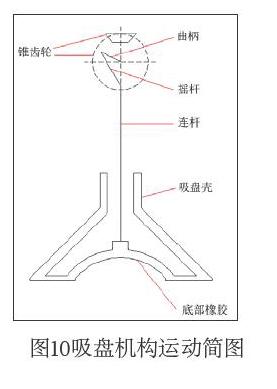
1.吸盘机构:吸盘机构主要用于通过在吸盘内外产生压力差来吸附地面,增加装置与地面之间的抓力。吸盘机构由活塞连杆和橡胶吸盘以及后箱中的锥齿轮传动机构和曲轴组成,其内部结构如图8所示。通过连杆的运动带动橡胶吸盘的运动,当装置在行进过程中需要抓地时,橡胶吸盘被拉伸,使吸盘内部形成空腔,使得内部气压减小,然后在外部大气压的作用下,将装置紧紧地吸附在地面上;同理当吸盘需脱离地面向前行走时,橡胶吸盘被挤压,使得内部气压变大,当内部气压大于外部大气压时,吸盘与地面脱离。
吸盘机构的实现主要是靠后箱体中的电机通过轴输出带动锥齿轮2转动,然后由锥齿轮2将转动传递到锥齿轮1,然后由锥齿轮带动曲轴转动,进而使套在曲轴上的连杆转动,最后由连杆带动活塞连杆运动推动吸盘的运动,装配关系如图9所示。运动过程中适当调节后箱中电机输出轴转过的角度来控制曲轴运动,最终控制吸盘的吸附与放松,其机构运动简图如图10所示。此处采用锥齿轮,充分利用了锥齿轮寿命长,高负荷承载力以及减震的特点,更重要的是通过使用锥齿轮,实现了两.个垂直轴的传动。
2锁扣机构:在设计过程中,为了使得机器人能够适应各种不同的路面情况,进而可以更好、更稳定地吸附于地面,本装置在吸盘机构的后箱体上设计添加了锁扣机构,如图11所示为锁扣机构的透视图。在行走过程中,当控制中心识别路况后发出指令利用吸盘吸附于地面之进行行走运动,本装置设计了行星齿轮机构,可通过电机驱动中心的太阳轮转动从而同时带动周边的四个行星齿轮转动,最终将4个锁扣扣到吸盘尾部的连接柱上,起到了连接基体与吸盘机构的作用;如果需要另一种运动方式而不采用吸盘吸附,只需通过电机驱动反转,将锁扣打开,在通过连杆的运动就可以使吸盘机构与基体分离。锁扣机构如图12所示。
(五)按摩模块设计
如图13所示为按模模块,该模块主要由按摩骨、支架、曲轴、连杆和推杆五部分组成。其中,按摩骨由多块易形变骨组成,因此其具有较强的适应性,通过支架与支座固连,曲轴由电机带动,并实现传动,从而实现变形按摩骨的前后运动达到按摩效果。可根据老年人的背部情况自动贴合在老年人的背部,使振动传递到老年人的背部达到背部按摩的效果。而颈部按摩块由于其完美地贴合人体的颈部造型,通过电机产生的振动可起到人体颈部按摩的效果。
(六)底部支撑模块设计
如图14所示为底部支撑模块整體图。为减小装置行进时的震动,以及协助老年人站立,保持装置的稳定,装置底板设计了弹簧推杆结构以及支撑推杆。当装置作为四足机器人行进时,为减小震动,弹簧推杆作为减震装置发挥作用;当老年人需要站立时,弹簧推杆向上推起,助力老年人站立。支撑推杆作为稳定支杆支撑整体。
当装置为轮椅形态时,底部翻转轮支撑整体,进行前进,保持平稳。
(七)检测反馈模块
系统主要有两部分组成,第一部分包括前端数据采集传感器、信号处理单元、主控制芯片和射频通信模块组成。第二部分由上位机、微控制器和无线通信模块组成。前端数据采集传感器主要包括三轴MEMS加速度传感器、三轴MEMS陀螺仪传感器和三轴MEMS电子指南针传感器,陀螺仪由于动态性能好,用于获取实时的动作信息。但陀螺仪会产生偏移,而加速度传感器和电子指南针传感器其静态性能比较优越,所以可以用来对陀螺仪的动作检测数据进行相应的修正,如图15。
三、可行性分析
(一)整体分析
Accompanyspider助力老年行走机器人的设计结构并不复杂,由基本的机械传动机构组成(例如:行星轮、曲柄滑块等),因此在技术层面,Accompany spider助力老年行走机器人是完全可以实现的。
材料方面,装置整体框架采用质地轻盈的铝合金,其加工.难度低,耐腐蚀能力强,在保证机器人结构强度的同时,减少机器人整体重量,使其轻量化。
(二)部分零部件应力校核分析
1.变形多足行走模块吸盘机构:吸盘为行走部分的重要零件,吸盘与地面的吸附力大小影响着装置整体的平稳性好坏,且吸盘所承受的压力为整个车身的重量,由于整个车身由多条支撑腿共同受力,因此在对吸盘进行受力分析时在吸盘施加大小为50N的力,约束固定在与地面支撑处,其网格划分、材料参数、载荷参数如表1所示,根据下表所设置的参数利用inventor软件对该吸盘进行应力分析,其具体结果如图16,17所示:
分析结果显示,吸盘所受的最大应力2.143MPa,低于橡胶材料的强度和极限拉伸强度,因此,吸盘的形状与尺寸设计及材料选择在实际工作载荷下满足工作要求。
2.多功能机械臂模块机械臂手掌壳
机械臂在工作过程中会对自身产生应力,整体体结构需要有足够的强度和刚度,必须达到所设计环境的工作要求。其材料分析如表2所示,针对机械臂上的手部外壳通过Inventor软件进行分析,其结果如图18:
分析结果显示,手掌件最大应力361.4MPa,低于合金钢屈服强度和极限拉伸强度,因此,机械臂手掌的形状与尺寸设计及材料选择在实际工作载荷下满足工作要求。
四、整体创新性
(一)功能创新
1.将多种辅助功能融为一体,使用一种机器人便可辅助行动不便的老年人完成日常活动。为老年人提供腿部支撑的同时,还兼顾按摩、取物等功能,真正方便老年,人的生活。
2.为适应在多种路面上行走,采用了两种不同的行走模式,在普通路面能够正常行走的同时,兼顾瓷砖、楼梯等特殊路面,可以自动检测路面情况选择不同的行走方式,让老年,人行走平稳性提高。
3.采用弹簧推杆结构实现辅助老年人进行站立的功能,方便老年人进行站立动作,并减少此动作对老年人膝盖的损伤。
(二)机构创新
1.轮系与吸盘行走方式组合,使车轮可实现0转弯半径转向,对地面适应性强,在各种复杂路面均可顺利运动。
2.可变多足式行走机构设计,在进行瓷砖等光滑路面和楼梯上的行走动作时,可以大大提高老年人行走的平稳性,避免老年人因为重心长时间倾斜带来的损伤。在不进行使用时,还能收缩折叠,以节省装置安放的空间。
3.按摩骨按摩模块设计,由多块易变性骨、支架、曲轴、连杆、推杆组成,曲轴由电机带动,实现对老年,人背部进行按摩的功能。
结语
本设计Accompany spider助力老年行走机器人装置原理可行,材料易获取,能够对老年人特别是行动不便的老年人的日常生活起到比较大的帮助作用,在人口老龄化趋势的地区有较好的前景。
参考文献
[1]彭文生,等.機械设计:第2版[M].武汉:华中科技大学,200[J].
[2]唐增宝,常建娥机械设计课程设计.第3版[M].武汉:华中科技大学,2006.
[3]熊良山,等机械制造技术基础第1版[M].武汉:华中科技大学,2007.
[4]曲彩云,等机械设计手册第3版[M].北京:机械工业出版社,2007.
[5]之庚,陈开来,等工程塑料手册.应用与测试卷[M].北京:机械工业出版社,2004.
[6]之庚,陈开来,等工程塑料手册.材料卷[M].北京:机械工业出版社,2004.
[7]朱孝录,等齿轮传动设计手册[M].北京:化学工业出版社,2005.
[8]张明树,李强,迟永刚,单东伟.一种基于可摆动吸盘的多用途高效真空吸取器设计[J].制造业自动化,2015,(16):84-88.
[9]王裕清,王红旗,张高峰,陈小静.目标物体抓取机械手的设计与仿真[J].机械设计与制造,2015,(2):168-172.
[10]张硕基于联合分析法的机器人头部形态研究[J].设计,2017,30(11):108-109.
猜你喜欢
红领巾·萌芽(2022年2期)2022-01-31
学苑创造·A版(2017年9期)2017-09-25
知识就是力量(2017年2期)2017-01-21
快乐作文·低年级(2016年9期)2016-09-30
南风窗(2016年7期)2016-03-31
知识就是力量(2016年2期)2016-02-01
小朋友·快乐手工(2015年11期)2016-01-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
