浅谈Process Simulate软件碰撞检测功能的使用方法
2020-08-16 10:34李伟廷
青年生活 2020年30期
关键词:使用方法
李伟廷


摘要:碰撞检测是机器人生产线虚拟仿真过程中必不可少的一个步骤,通过碰撞检测,可以在机器人运动过程中动态检测与之发生碰撞干涉的设备,这样就可以对设计方案提出修改与优化建议,做到提前预知、规避设计风险。大多数的机器人虚拟仿真软件都具有自动碰撞检测的功能,比如DELMIA软件中的“Clash”命令,Robotstudio软件中的“碰撞监控”功能等。Process Simulate软件中也同样提供了这样的功能,因此文章主要介绍碰撞检测的使用方法。
关键词:碰撞检测;仿真运行;使用方法
一、碰撞查看器窗口介绍
Process Simulate软件中,机器人碰撞检测功能是在Collision Viewer(碰撞查看器)窗口中实现的,默认情况下Collision Viewer窗口已经打开,可以直接查看。若是CollisionViewer窗口未打开,可以在软件“Home”菜单栏下,“Viewers”按钮的下拉菜单中点击“Collision Viewer”,Collision Viewer窗口将会显示在软件工作区的最下方。
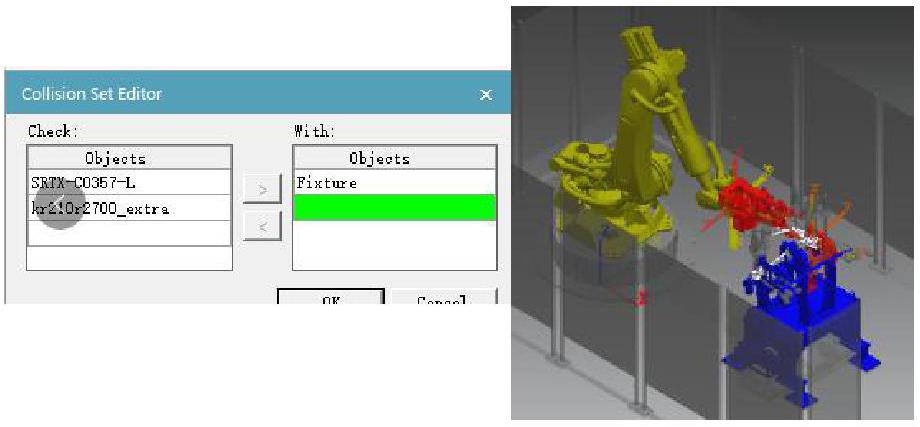
Collision Viewer窗口由三个功能区域组成,以下分别详细介绍。左侧功能区域主要用于创建和管理碰撞检测集合。中间功能区域显示碰撞检测结果,并包含碰撞结果查看操作选项。其中,主碰撞对象碰撞检测结果以红色显示,与之发生碰撞的对象以蓝色显示。右侧功能区域显示所选碰撞的碰撞曲线,每条曲线以其碰撞对象命名。创建碰撞检测集合在进行碰撞检测之前,要先创建碰撞检测集合。Collision Viewer窗口中左侧功能区域中点击“New Collision Set”命令按钮,弹出Collision Set Editor对话框。在Collision SetEditor对话框中可以设置待检测的碰撞对象,其中Check列表用于添加待碰撞检测的主对象,With列表用于添加与主碰撞检测对象存在碰撞可能性的对象。对于机器人点焊工艺仿真,一般情况下主碰撞检测对象设置为点焊焊枪、机器人,碰撞对象设置为工装夹具等周边设备。
碰撞检测集合创建完成后将在CollisionViewer窗口的左侧功能区域列表中显示,默认显示名称为new_collision_set。若是创建多个碰撞检测集合,则碰撞检测集合名称后会自动添加集合编号后缀。此时,点击“EmphasizeCollision Set”命令按钮,软件工作区中碰撞检测集合中选定的主碰撞检测对象(Check列表)将以黄色高亮显示,与之有碰撞可能的对象(With列表)将以蓝色高亮显示,若是二者中任意机构发生了碰撞,则相互碰撞的对象将以红色高亮显示。
二、碰撞检测测试
在执行碰撞检测之前,可以先对碰撞检测选项参数进行配置。在Collision Viewer窗口的中间功能区域,点击上方的“Collision Options”命令按钮,弹出Collision Option对话框。在此对话框中可以配置相关碰撞检测参数,如碰撞检测允许接近范围、碰撞结果输出等级、碰撞输出效果等。这里,可以在Collision Options选项区域下勾选“Stop Simulation when a Violation is Detected”,碰撞發生时停止虚拟仿真过程。
Collision Viewer窗口左侧功能区域中确认已选择创建好的碰撞检测集合,然后在中间功能区域中点击“CollisionMode On/Off”命令按钮,激活碰撞检测模式。切换到Path Editor窗口,对需要碰撞检测的机器人工艺路径进行虚拟仿真运行操作。开启仿真运行后,再次切换回Collision Viewer窗口。机器人在运行过程中,若是检测到碰撞,则Process Simulate软件会输出碰撞提示音,同时在中间的功能区域中显示碰撞检测结果,机器人停止仿真运行。
软件工作区中,发生碰撞的机构模型将以红色高亮显示
再次点击仿真运行按钮,机器人将继续后续的仿真运行操作。当再次发生碰撞时,将再次输出碰撞检测结果,并停止仿真运行。
三、碰撞检测结果操作
在CollisionViewer窗口的中间功能区域中,点击任意一条碰撞检测结果,然后点击上方的“Show \Hide Colliding Contour”命令按钮,在右侧功能区域中显示碰撞曲线。点选任意一条碰撞曲线,上的“Zoomto Selection”命令按钮将被激活,点击此按钮,软件工作区视图将快速切换到发生碰撞的位置处。可以看到数模碰撞接合部位以黄色高亮显示,点选的碰撞曲线以蓝色高亮显示。
点击“Export toExcel”命令按钮,可以将当前的碰撞检测数据输出到Excel表格中,表格文件格式为*.CSV,表格数据的详细程度与Filter Collision Results命令选项保持一致。点选任意一条碰撞检测结果,然后点击“Collision Depth”命令按钮,弹出Collision Depth对话框,在此对话框中可以显示发生碰撞的对象,以及碰撞向量坐标与碰撞深度数据,同时在软件工作区中发生碰撞的位置处也会显示碰撞向量与碰撞深度数据。
结语:
碰撞检测是机器人生产线虚拟仿真过程中必不可少的一个步骤,通过碰撞检测,可以在机器人运动过程中动态检测与之发生碰撞干涉的设备,这样就可以对设计方案提出修改与优化建议,做到提前预知、规避设计风险。
猜你喜欢
新农村(2016年12期)2017-01-12
未来英才(2016年22期)2016-12-28
青春岁月(2016年22期)2016-12-23
青春岁月(2016年20期)2016-12-21
现代农业科技(2016年20期)2016-12-20
考试周刊(2016年66期)2016-09-22
商(2016年3期)2016-03-11
科技视界(2015年25期)2015-09-01