面向森林输电线路林火监测的无人机吊舱系统研制★
2020-08-12 10:54:00谭杨磊王勇智张傲宇刘铮言
山西建筑 2020年16期
谭杨磊 王勇智 韩 锐 张傲宇 刘铮言
(东北林业大学机电工程学院,黑龙江 哈尔滨 150040)
由于我国地理位置分布原因,发电资源和大容量、远距离的输电线路常常分布在树木茂密的森林中。据报道,全球每年发生森林林火22万次,燃烧大约640万hm2的森林面积,相当于全球所有森林面积的0.23%,森林火灾已经成为八大主要自然灾害之一。随着全球气候变化及平均温度升高,全球森林火灾发生频率也随之升高,加上清明节祭祖传统以及工农业生产的影响,据不完全统计,多起输电线路跳闸事故是由于林火导致的,林火已经成为严重影响电网安全稳定运行的主要因素之一。林火火线定位对于实时监测林火蔓延趋势,指导灭火扑救对输电线路的抢救具有至关重要的作用。
目前,国内外对于输电线路的林火监测和预警进行了大量研究,由于卫星图像容易受云层影响,并且卫星数据时空分辨率较低,在大尺度林火监测中应用较多。对于精细化的林火管理,无人机航空遥感数据优势明显,近年来,随着无人机的高速发展,迅速应用于各个领域,作为搭载平台无人机在监测领域中有着良好的发展前景。鉴于林火对于输电线路的危害,为了解决上述问题,我们设计了一种基于无人机的吊舱系统对林火进行有效的实时精准定位来减少林火对于电网安全稳定运行的危害。
1 林火监测定位无人机吊舱系统的整体设计
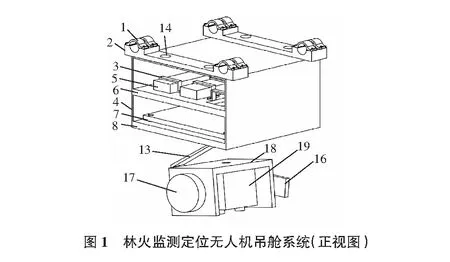
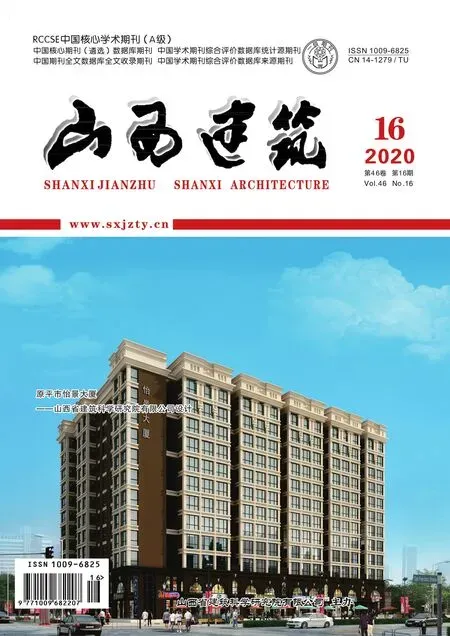
林火监测定位无人机吊舱系统的总体设计方式:该林火监测定位无人机吊舱系统是由吊舱主体、减震装置、相机雷达模块三部分组成,吊舱主体内置高速嵌入式处理器(NVIDIA Jetson TX2)以及配套的电源装置;减震装置负责吊舱主体以及相机雷达模块的连接以及减震作用,相机雷达模块通过三维激光雷达、红外相机和可见光相机的配合采集数据,将采集的数据经过高速嵌入式处理器(NVIDIA Jetson TX2)的处理传输回地面计算机。实现对林火的实时监测。具体布局如图1,图2所示。
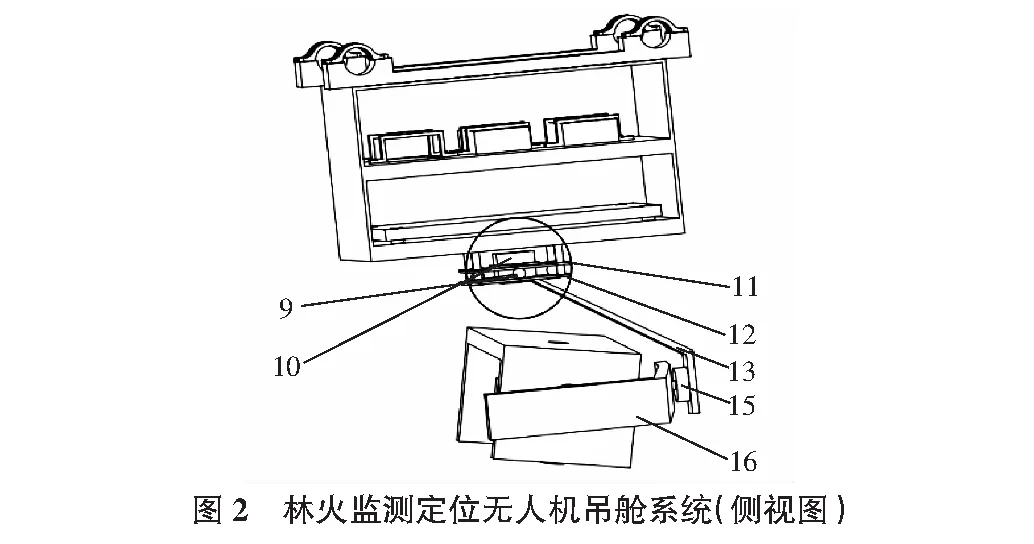
图1,图2中:1为紧固件;2为无人机连接板;3为固定电池架;4为相机吊舱;5为承载电池;6为上承载板;7为开发板;8为下承载板;9为减震球;10为减震板连接架;11为减震板上;12为减震板下;13为相机云台连接架;14为螺纹孔;15为小型电机;16为相机云台架;17为激光雷达;18为相机固定架;19为红外相机。
2 林火监测定位无人机吊舱系统组件的详细设计
2.1 吊舱主体的设计
吊舱主体采用光敏树脂材料3D打印一体化成型,吊舱主体设计分为上承载板和下承载板。无人机通过连接架4个螺栓与吊舱主体相连接,上承载板内置3个承载电池定位槽,定位槽与固定电池架通过螺栓相配合紧固承载电池,电池通过导线连接为高速嵌入式处理器(NVIDIA Jetson TX2)、红外相机、激光雷达、惯性导航系统提供电源支持。下承载板通过螺栓连接高速嵌入式处理器(NVIDIA Jetson TX2),高速嵌入式处理器(NVIDIA Jetson TX2)通过导线连接将红外相机、三维激光雷达和可见光相机所获取地面林火的数据进行数据处理,并传输回地面计算机。
2.2 减震装置的设计
无人机振动主要来自电动机和螺旋桨高速旋转所产生的低频和高频振动,经过无人机传递到吊舱系统的相机雷达模块导致画面构图模糊畸变。设计减震装置包括减震板上、减震板下、硅胶减震球,减震板上4个角处设有直径大于吊舱连接立柱直径的通孔,设计立轴有4根,每根立轴的上下端连接相机吊舱和下减震板,上减震板和下减震板中间贯通,上减震板与相机云台连接架通过螺栓固定连接,减震板上和减震板下之间安装4个减震球,无人机产生的振动由机身经过减震球的减弱传递到相机雷达模块。具体布局见图3。

图3中:9为减震球;10为减震板连接架;11为减震板上;12为减震板下。
2.3 相机雷达模块的设计
相机云台连接架设置一小型电机输出与相机云台架相连,相机云台架内部装有红外相机以及惯性导航系统,外部安装激光雷达。小型电机控制相机固定架X轴方向的旋转以及小型电机控制相机固定架Y轴方向的旋转。相机固定架内壁固定安装惯性导航系统,用于测量无人机速度偏航角等信息反馈给高速嵌入式处理器(NVIDIA Jetson TX2)。相机固定架通过螺栓结构固定可见光相机和红外相机。通过减震结构减小空气阻力干扰和一些由于机器本身带来的震动,从而增加吊舱结构的稳定性,也大大减小相机镜头的晃动,提高相机拍摄的稳定性,并设置两个小型电机实现相机云台双自由度旋转,提高了相机拍摄的灵活性。具体布局见图4。
图4中:10为减震板连接架;16为相机云台架;17为激光雷达;18为相机固定架;19为红外相机;20为惯性导航系统;21为小型电机。
2.4 工作原理
2.4.1吊舱软硬件平台设计
设计三自由度无人机云台,由三个步进电机分别控制相机云台的横滚和俯仰角度,将三维激光雷达和红外双光相机(即红外、可见光一体相机)搭载于无人机本体,同时在无人机机身安装高速嵌入式处理器(NVIDIA Jetson TX2)用于并行处理采集到的三维点云及图像等数据。
2.4.2数据融合
(我们对吊仓平台在同一时刻采集到的红外相机、可见光相机和激光雷达三种数据进行融合)同一时刻采集得红外相机、可见光相机和激光雷达三种数据融合,通过匹配点云数据中的三维点与图像数据中的像素点,生成“同名”点对,在多对“同名”的基础上,应用非线性优化算法实现三种数据融合,实现三维点被赋予红外温度属性和可见光灰度属性,同时红外图像及可见光图像的像素均被赋予三维物理坐标属性的目标。
2.4.3多帧数据配准
无人机飞行过程中在不同位置采集林火数据,必须通过计算帧间位姿将所有数据变换到统一坐标系下。设计基于尺度不变特征点的帧间数据配准算法,进而应用图结构位姿算法优化计算多帧数据采集时的无人机位姿,从而根据该位姿融合所有数据帧。
2.4.4林火行为图像
获得带有红外温度和可见光灰度属性的完整三维点云。把通过配准得到的三维点云进一步加工处理,获得多通道林火行为图像,用以表示林火状态,作为林火蔓延模型的统一化数据表示。图像通道包括:用于表示地形特征的高程通道、用于表示林内地面温度的温感通道和用于表示森林景观状态的灰度通道。
2.4.5火线定位
在林火行为图像的基础上应用边缘检测算法识别火线,通过林火行为图像的高程通道计算火线实际位置。
3 林火监测定位无人机吊舱系统的有益效果
无人机吊舱系统在实验环境下的林火点烧实验,对于林火监测定位无人机吊舱系统进行数据采集,观察实验得到的理论数据与实际点烧数据进行拟合比对可以得到实验结果。
在实际情况由于森林林火常常伴随着大量的烟雾阻碍对火线的定位,难以对输电线路进行有效的救援抢救灭火工作,基于这一原因,利用搭载三维激光雷达、红外相机和可见光相机无人机吊舱系统,利用算法完成对三维激光雷达、红外相机和可见光相机所采集的不同类别的实地勘测数据进行林火行为数据融合,采用林火火线定位算法能有效的对森林林火的火线精准定位,能实时的监控森林林火从而高效精准的处理森林林火并及时对输电线路进行抢救。该系统对于国家正在建立的林火智能预警系统,以及对于火线的蔓延趋势以及火线的准确定位,在灭火指挥和输电线路抢救方面提供精准数据从而有效的对林火采取合理快速的灭火方案。
4 结语
本课题所研制的林火监测定位无人机吊舱系统能够实时监测火线情况为输电线路的抢救灭火提供精准数据,并利用惯性导航系统以及高速嵌入式处理器(NVIDIA Jetson TX2)传输的数据,对火线进行精准定位,对火线的蔓延趋势进行判断。同时,这套装置具有应用范围广,应用灵活等诸多特点,对于我国林火智能预警系统的建立和推广具有一定推动作用,具有着良好的参考价值和广阔的发展空间。
猜你喜欢
中国新技术新产品(2023年1期)2023-04-07 02:25:26
江苏安全生产(2022年11期)2023-01-11 06:29:40
科学大观园(2022年14期)2022-07-17 03:54:41
山西林业(2021年2期)2021-07-21 07:29:28
小哥白尼(军事科学)(2020年12期)2021-01-18 06:10:12
人大建设(2020年2期)2020-07-27 02:47:54
中国新闻周刊(2020年6期)2020-03-08 14:20:46
小哥白尼(军事科学)(2018年3期)2018-06-15 09:56:48
小哥白尼·军事科学画报(2017年5期)2017-08-22 00:11:17
航空模型(2016年10期)2017-05-09 06:30:58