无人机密集匹配点云与机载激光雷达点云的差异分析
2020-08-08 01:49:12李春干
林业资源管理 2020年3期
林 鑫,庞 勇,李春干
(1.广西大学 林学院,南宁 530004;2.中国林业科学研究院资源信息研究所,北京 100091)
机载激光雷达能够精细刻画森林的三维结构,已广泛用于森林参数(树高、断面积、蓄积量、郁闭度等)估测[1],不但可以提高森林资源调查监测效率、降低成本,而且可以生成高精度的数字高程模型(DEM)以及一系列的森林参数估测产品,为森林经营管理者提供丰富、详细的林分结构信息[2]。然而,目前机载激光雷达技术应用仍存在着航空管制飞机调度困难、单架次投入较大等问题,小区域森林资源调查监测应用难以推广[3]。
小区域的无人机遥感影像数据获取成本低于机载激光雷达。近年来有研究发现,由航空遥感影像获取的密集匹配点云也能够较精确地刻画森林三维结构和估测森林参数。Bohlin等[4]将密集匹配点云和激光雷达生产的数字地形模型(DTM)相结合,对北方针叶林分的树高、树干材积和断面积进行估测;Zarco-Tejada等[5]利用无人机影像生成的三维点云对橄榄树(Canariumalbum)林进行单木树高提取;李亚东等[6]使用无人机航测技术获取试验区的数字地表模型(DSM)和数字高程模型(DEM),并以树高和冠幅作为解析变量对森林参数进行估测,结果树高、冠幅、蓄积量的估测精度分别达到83.73%,86.98%,81.80%;Fritz等[7]使用无人机搭载消费级相机得到的密集匹配点云进行树干提取,并与高分辨率地基激光雷达点云进行比较,发现无人机密集匹配点云和地基激光雷达具有高度相关性。有研究发现,密集匹配点云对树高、断面积、材积等的估测精度与机载激光雷达的估测精度十分接近[8]。目前,通过航空遥感影像获取集匹配点云估测森林参数的研究,大多数是在较稀疏林分中进行的。鉴于此,本文对不同密度的林分,分析无人机影像密集匹配点云与机载激光雷达点云的差异情况,以期为无人机在森林资源调查监测中的应用提供技术参考。
1 研究区概况
研究区位于河北省围场满族蒙古族自治县北部的塞罕坝机械林场,地理坐标42°12′~42°34′N,116°54′~117.27′E,处于内蒙古高原与冀北山地的交汇地带,海拔1 500~2 067m。林场主要以华北落叶松(Larixprincipis-rupprechtii)、樟子松(Pinussylvestris)、云杉(Piceaasperata)人工林为主。在研究区内选择3块不同密度的人工林进行试验,密集林分、稀疏林分和未成林地的面积分别为7,13,25 hm2,造林密度分别为4 000,300,2 000株/hm2(均未进行过间伐),林分年龄分别为57,56,3a,由激光雷达得到的林分平均高分别为14.8,17.3,1.3 m。密集林分、稀疏林分郁闭度分别为0.85和0.55。
2 研究方法
2.1 数据采集系统与处理
1) 2018年8月采用深圳大疆创新科技有限公司生产的Phantom 4RTK获取无人机影像数据,飞行高度50 m,云台倾角-90°(正射拍摄),航向重叠80%~85%,旁向重叠70%,影像空间分辨率0.02~0.03 m。2018年8—9月由AS350“松鼠”直升机搭载CAF-LiCHy系统[9]获取激光雷达数据。激光雷达传感器为RieglLMS-Q680i,波长1 550nm,扫描角±30°,采集全波形数据,扫描频率240 KHz。飞行相对航高 1 100m,旁向重叠58%,单条航带的点云密度4.1点/m2。
2) 对机载激光雷达点云数据进行航迹检校,平面位置精度控制在2cm之内,航带间点云误差为12~22cm。使用Lastools软件[10]对离散点云数据进行去噪处理,得到DEM(LiDAR_DEM)等产品。
3) 在Agisoft PhotoScan Professional软件中通过SfM和MVS算法提取无人机影像密集匹配点云。为获取详细的冠层结构信息,在数据处理过程中,对齐照片和建立密集点云的生成质量分别选择最高和超高模式,密集点云生成中的深度过滤为轻度模式,完成处理后将密集匹配点云导出。密集匹配点云的DEM(UAV_DEM)生产方法与机载激光雷达点云的生产方法相同。
4) 为使密集匹配点云和机载激光雷达点云具有相同的坐标系,在激光雷达点云中选择易于判读的地面点作为控制点进行配准,2种点云的平均距离偏差优于0.3m。密集林分、稀疏林分和未成林地的LiDAR点云密度分别为33,48,9点/m2,相应的密集匹配点云密度分别为102,1 524,1 387点/m2。
2.2 点云数据差异性分析
数据分析采用目视比较和统计检验2种方法进行。目视比较通过观察2种点云分别在3种密度林分中的空间分布,分析其精确刻画不同密度林分冠层三维结构的能力。
在密集林分、稀疏林分和未成林地中分别随机布设164,181和103个10m×10m的空中样地,提取2种点云数据,对密集匹配点云分别使用UAV_DEM和LiDAR_DEM进行高度归一化处理,得到2套密集匹配点云归一化数据,机载激光雷达点云使用LiDAR_DEM进行高度归一化,采用配对t样本检验方法检验2套密集匹配点云和激光雷达点云的统计特征参数的差异性。检验指标包括5个高度指标和4个密度指标:25%,50%,75%分位数高度(ph25,ph50,ph75)、平均高(hmean)、最大高(hmax);25%,50%,75%分位数密度(dh25,dh50,dh75)和郁闭度(CC)。
3 结果与分析
3.1 点云空间分布的差异
在密集林分中,无人机密集匹配点云与机载激光雷达点云在林分冠层表面的分布基本相近,但冠层内部和地面几无密集匹配点云分布(图1(a))。在稀疏林分中,密集匹配点云和激光点云的空间分布比较接近,两者都较好地刻画了林分冠层三维结构(图1(b))。在未成林地中,由于密集匹配点云密度极大而激光点云密度相对较小,故密集匹配点云比激光点云能更好地刻画冠幅小的幼树的空间分布(图1(c))。

图1 3种密度林分中无人机密集匹配点云和机载激光雷达点云的空间分布
以上结果说明,随着林分冠层密度增大,密集匹配点云刻画林分三维结构的能力越差。原因是因为林分密度逐渐增大时,林木枝叶的相互遮挡程度也逐渐增高,林分冠层表面以下的点云提取变得越来越困难。
3.2 点云统计特征参数的差异
由于在密集林分中无人机密集匹配点云缺乏地面点数据,无法生成UAV_DEM并用其进行密集匹配点云的归一化处理,故无法进行UAV_DEM归一化的密集匹配点云与激光点云的统计特征参数比较分析。
在采用UAV_DEM归一化时,稀疏林分的5个高度统计特征参数中,无人机密集匹配点云与机载激光雷达点云除ph25存在显著性差异(P<0.05)外,其余参数均无显著性差异,4个密度统计特征参数的差异也不显著。就高度统计特征参数而言,未成林地的情况与稀疏林分相似,但未成林地的中上层密度统计特征参数(dh50,dh75),密集匹配点云与激光雷达点云存在显著性差异(表1)。
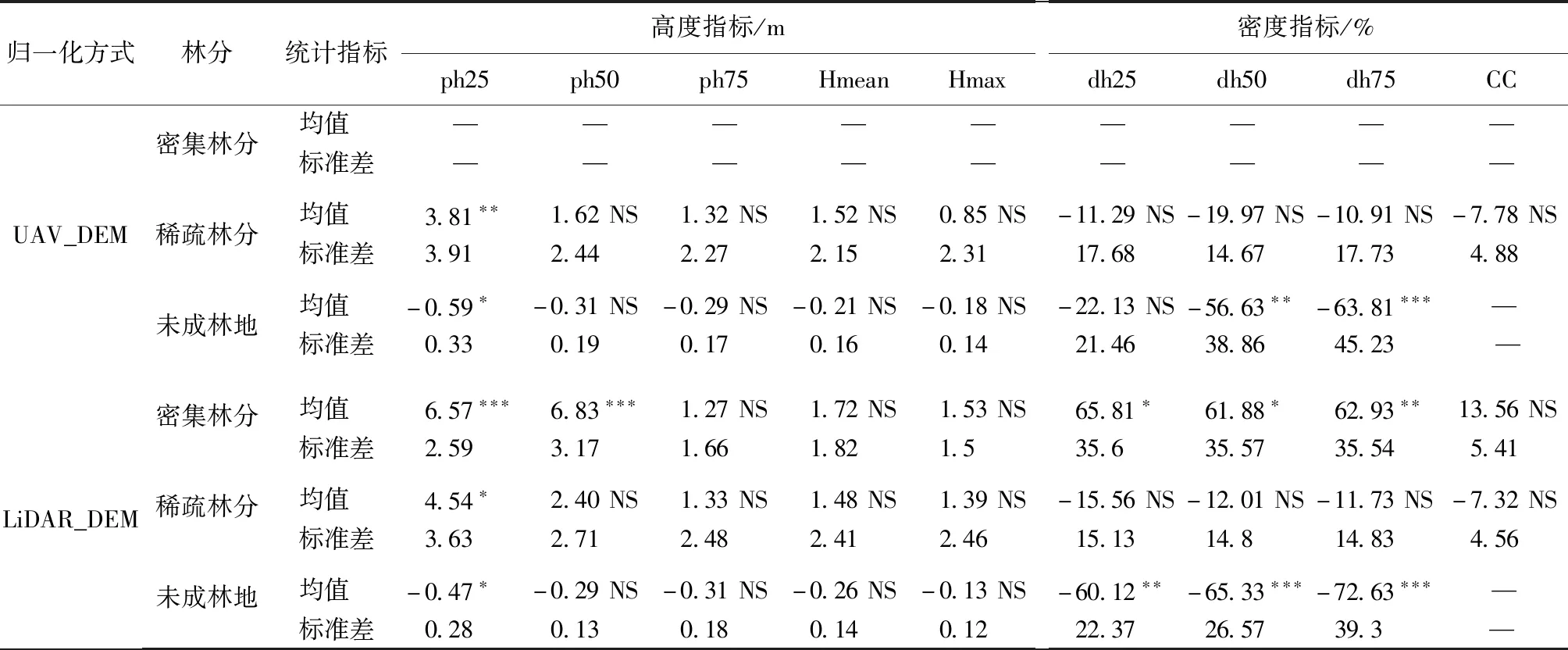
表1 2种密集匹配点云与激光雷达点云的统计特征参数配对样本t检验结果
在采用LiDAR_DEM进行归一化时,密集林分中无人机密集匹配点云的ph25,ph50均值和激光雷达点云的ph25,ph50的均值均存在显著性差异(P<0.001),而ph75,hmean和hmax不存在显著性差异。稀疏林和未成林地中,只有ph25存在显著性差异(P<0.05),其余4个高度统计特征参数均不存在显著性差异(表1)。
在密集林分和未成林地中,密度匹配点云的dh25,dh50和dh75与激光雷达点云相应统计特征参数存在显著性差异,但密集林分的郁闭度的差异不显著,在稀疏林分中,2种点云的4个密度统计特征参数的均值均不存在显著性差异(表1)。
造成密集匹配点云与激光雷达点云统计特征差异的原因是点云的空间分布不同,点云的空间分布决定林分高度和密度统计特征参数值的大小。在密集林分和未成林地中,2种点云的空间分布相差很大,其统计特征参数相差也就比较大;在稀疏林分中,2种点云的空间分布十分相近,相关的统计特征参数差异也就比较小。
4 讨论
1) 在密集林分中无人机密集匹配点云缺乏地面点,无法生成UAV_DEM对点云进行归一化,仅通过密集匹配点云无法直接获取林分冠层高度的信息,故密集匹配点云也就无法直接用于森林参数估测。使用LiDAR_DEM对密集匹配点云进行高度归一化处理时,密集匹配点云和激光点云的林分中下层的高度统计特征参数(ph25,ph50)和冠层内的密度统计特征参数(dh25,dh50,dh75)的均值均存在显著性差异,林分中上层高度的统计特征参数(ph75,hmean,hmax)和郁闭度的差异不显著,鉴于激光雷达点云可以准确估测林分参数的情况,所以在有高精度DEM的前提下,可以利用密集匹配点云进行冠层表面高度等一些森林参数估测。Lisein等[11]采用这一方法进行林分冠层表面高度估测的模型的决定系数R2=0.82,均方根误差rRMSE=8.4%。但是,由于可利用的点云统计特征参数有限,利用这一方法难以对平均直径、断面积、蓄积量等参数进行较精确的估测。
2) 在稀疏林分中,不论是使用UAV_DEM还是使用LiDAR_DEM进行高度归一化,除ph25外,密集匹配点云的高度和密度统计特征参数与激光雷达点云的相应的统计特征参数均无显著性差异,意味着可以直接应用无人机密集匹配点云进行平均高、蓄积量等林分参数反演。Hemandez等[12]对松树人工林平均高、冠幅估测结果的R2分别达到0.81和0.95,rRMSE达到4.56%和6.14%。稀疏林分ph25呈显著性差异的原因可能是,稀疏林的林窗大,太阳直接照射到地面的范围大,树影区和光照区亮度值范围过大,从而影响了无人机密集匹配的效果[13]。
3) 本研究结果显示,LiDAR点云由于密度较小而无法准确刻画冠幅较小的幼树三维结构,而无人机密集匹配点云,由于密度大而具有这种能力,因此,可以通过无人机影像提取密集匹配点云来估测幼树的树高,开展造林成效调查等。
5 结论
1) 对于密集林分,无人机密集匹配点云不能直接用于森林参数估测,在既有高精度DEM数据的前提下,可进行冠层表面高度等数量有限的森林参数反演。
2) 对于稀疏林分,无人机密度匹配点云的统计特征参数与机载激光雷达点云的统计特征参数基本上不存在显著性差异,故无人机密集匹配点云可直接用于森林参数估测。
3) 对于新造未成林地,无人机密集匹配点云对幼树三维结构的刻画优于机载激光雷达点云,因此,在未成林地调查中,无人机密集匹配点云比机载激光雷达点云更具优势。
猜你喜欢
中国农业信息(2022年1期)2022-05-25 13:31:46
农业机械学报(2021年11期)2021-12-07 05:36:44
今日农业(2021年9期)2021-11-26 07:41:24
中国特种设备安全(2021年5期)2021-11-06 05:09:00
装备制造技术(2021年4期)2021-08-05 07:39:54
英语文摘(2021年2期)2021-07-22 07:56:52
大气科学(2021年1期)2021-04-16 07:34:18
制造技术与机床(2017年11期)2017-12-18 06:46:39
农业环境科学学报(2017年2期)2017-03-20 14:57:37
电测与仪表(2015年7期)2015-04-09 11:40:04