
静态无人机电机旋翼噪声分析及试验*
2020-08-05 05:03郭少杰
机械研究与应用 2020年3期
夏 天,郭少杰
(1.天津电子信息职业技术学院,天津 300350; 2.中国汽车技术研究中心有限公司,天津 300300)
0 引 言
伴随科技发展,越来越多的无人机正进入人们的视野。从亚马逊利用大型多旋翼无人机进行社区快递运送,到全国成百上千的无人机爱好者协会,无人机正逐渐影响到社区的每一个人[1]。而无人机旋翼转速高,发出尖哨的噪声,会对噪声受体造成一定程度的影响。目前主流的无人机制造厂商已经意识到测试和降低无人机噪声的重要性,大疆创新公司利用多重构桨叶造型、采用静音马达等等技术降低旋翼噪声[2]。而实际上,对于无人机噪声的测试方法目前国内外还没有明确文献有说明。为此,笔者参考了国际民航组织的环境技术手册第一卷:航空器噪声合格审定程序[3]以及SAE-ARP1846文件[4],以及国内的中国民用航空规章第36部[5-6],进行多旋翼无人机在静态下的,不同测试条件下的A计权声压级并计算出等效连续声压级,根据测试分析多旋翼无人机可进行的噪声优化方案。
1 微小型多旋翼无人机噪声
微小型多旋翼无人机噪声主要来源于旋翼噪声和电机噪声。本研究所采用的电机为最常见的旋翼无人机所搭载的外转电机,高速旋转时会发出啸叫声。某些旋翼无人机还利用电机通过齿轮机构带动旋翼,齿轮机构还会因为高速啮合发出较为“尖哨”的传动声音[7]。另外,微小型多旋翼无人机因其尺寸小,轴间距小,旋翼直径较小,因此转速会更高,因为叶尖产生的激振频率也越高。
2 旋翼电机组件噪声测试
2.1 噪声数据记录方法
2.1.1 A计权声压级
A计权声压级是人类能听到声音频率的标准加权。由于人类对于声音的敏感程度随声音频率的改变而改变,A计权声压级其加权频率覆盖了20-20000 Hz的人类听觉频率范围,更接近人类听觉的特性曲线,在人类声学测量范围内利用非常广泛,所以笔者在测试时记录A计权声压级以进行后续计算。
2.1.2 等效连续声压级[8]
多旋翼无人机的电机旋翼机构可稳定工作于某一功率下,但飞控系统可根据环境条件随时调整某个电机的功率,可能导致噪声有细微的变化,为了考虑这种变化,在计算过程中利用连续等效声压级的影响,并且考虑到数据的可靠性,每种工况进行6组试验,并进行方差估算,若数据在95%置信区间内,认为数据为可靠的。等效连续声压级的计算公式如下:
(1)
式中:LPA是某一时刻的瞬时A计权声压级,T是测量时间。若数据符合正态分布,利用如下公式进行快速计算:
(2)
d=L10-L90
(3)
式中:L10,L50,L90为累计百分声级,分别为测定时见内10%,50%,90%的时间超过的噪声级。
2.1.3 快速傅立叶分析(FFT)[9]
快速傅里叶变换(FFT)是离散傅里叶变换(DFT)的一种快速算法。利用SPECTRUM软件,实时分析电机旋翼的FFT图形,以此分析无人机电机旋翼组件在不同构型和转速下的频率特性。
2.1.4 噪声数据的有效性
每种测试条件进行六组数据分析,若数据在95%置信区间内,认为测得噪声数据有效。另外,所有测得的A计权声压级要高于环境A计权声压级10 dB(A)以上,认为电机旋翼噪声没有收到环境噪声的干扰。数据有效测试时间为50 s,每0.5 s采样一次A计权声压级,每次测试采样100个A计权声压级数据。
2.2 电机旋翼噪声测试方法
电机选用旋翼无人机最常用的XXD2212-1400 kV型无刷电机,最大转速11800 r/min,搭载8045型螺旋桨(桨叶长度20.32 cm,8inch),该单电机旋翼组件能实现最大推力7 N。电机旋翼安装为其旋转轴线垂直于地面,旋翼顶部距地面高度为1.5 m,用于采集声音的麦克风头部正对上方,切忌偏于电机旋翼方向。并且麦克风头部与电机旋翼在同一水平面上,距离多旋翼无人机中心距离4 m。如图1所示,为所选用的两组电机旋翼组件。
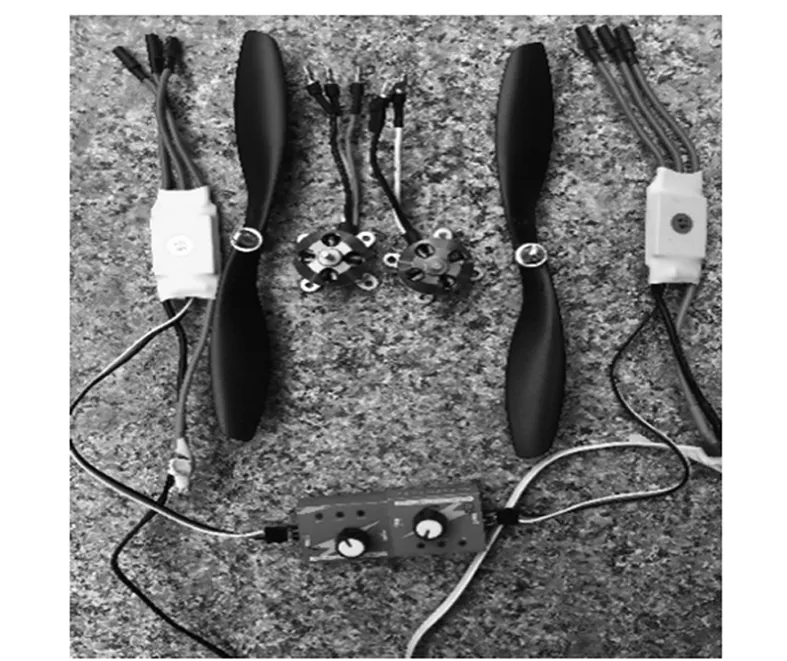
图1 测试用电机旋翼组件
分别计算单一电机旋翼在3种不同转速下的等效连续声压级(每次6组),以及不同转速下的FFT分析。在增加一组电机旋翼组件,让其者在60%转速下,分别记录多组旋翼电机空转以及加上螺旋桨后的FFT分析。
2.3 电机旋翼噪声数据
20%转速条件下测试数据及计算LAeq,T过程,见表1所列。20%转速条件下的FFT噪声频谱如图2。

表1 20%转速条件下测试数据及LAeq,T

图2 20%转速条件下的FFT噪声频谱
60%转速条件下测试数据及计算LAeq,T过程,见表2所列。60%转速条件下的FFT噪声频谱如图3。
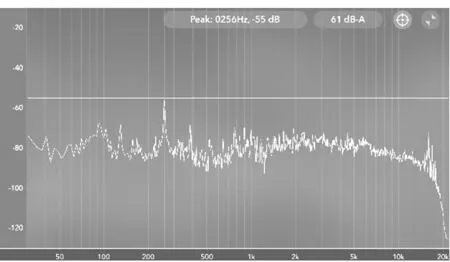
图3 60%转速条件下的FFT噪声频谱

表2 20%转速条件下测试数据及LAeq,T
最大功率转速条件下测试数据及计算LAeq,T过程,见表3所列。最大功率转速条件下的FFT噪声频谱如图4。

表3 转速条件下测试数据及LAeq,T

图4 最大功率转速条件下的FFT噪声频谱
60%转速下,增加一组相同的电机旋翼组件,需要注意的是两组电机组件的旋翼分别为正桨和反桨,以模拟真正多旋翼无人机的桨叶布置。通过改变布置形式,获得的FFT分析如下:
(1) 单电机无旋翼的电机噪声FFT图像如图5所示。

图5 60%转速条件下单电机无旋翼的电机噪声FFT图像
(2) 单电机加旋翼的电机旋翼组件噪声如本文中图3所示。
(3) 两组电机(不带旋翼)轴距相距33 cm,稳定转速后,得出的FFT分析如图6所示。

图6 60%转速条件下双电机无旋翼的电机噪声FFT图像
(4) 将两组电机旋翼组件轴距调整为33 cm,稳定转速后,得出的FFT分析如图7所示。
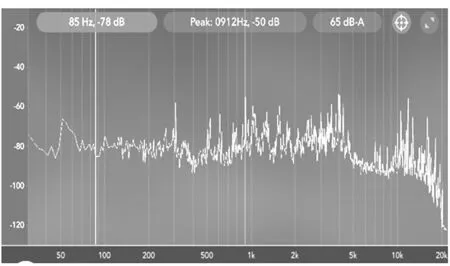
图7 60%转速条件下双电机带桨叶的噪声FFT图像
3 结果分析
3.1 数据有效性
三组单电机旋翼机组噪声数据经过置信区间计算,所计算的50 s累计声压级均在置信区间内,且数据均超出环境声压级10 dB(A)以上,认为数据是有效的。60%转速下,单裸电机、双裸电机和电机旋翼组件的噪声测试也符合上述条件。
3.2 转速对于电机旋翼组件的影响
在60%转速以下,转速的提升对于累计声压级大小的影响并不明显,主要影响了峰值频率的大小;在60%转速以上,转速的提升对于连续等效声压级影响较大,峰值频率也会提升。
特别是60%转速条件下,出现了256 Hz的共振频率,因此在该转速下,需要特别注意避开共振频率。
3.3 电机和旋翼的噪声比值分析
从电机(不带旋翼)本身的FFT分析情况,结合带旋翼的FFT分析,可以明显看出带旋翼后整个中高频率范围声音波动幅度较大,可以分析可能造成该问题的主要原因是旋翼本身在转动时所引起的富裕振动造成。
4 结 论
此次静态旋翼噪声测试受测试条件限制,没有在室内消音环境下进行,在空旷室外进行,对于研究数据来说可能会有相对误差,但同时也反映了真实的室外气动环境测试。选择试验的环境条件满足《中国民用航空规章第36部航空器型号和适航合格审定噪声规定》中有关旋翼类飞机噪声测试的环境要求。根据数据分析,桨叶旋转带来的气动噪声会使得声音变得更加“嘈杂”,桨叶的静音设计和强度设计显得尤为重要。由于转速对于电机旋翼组件的影响在高转速时影响效果较为明显,因而旋翼无人机在起飞时的噪声控制显得尤为重要。并且应该在将桨叶的共振频率与无人机巡航时电机转速下的最高频率岔开。在进行旋翼无人机载重飞行时,尽可能让旋翼电机中等偏上转速以下工作,这样引起的噪声变化较小,利于消声的同时,对于环境会更加友好。
猜你喜欢
声学技术(2022年4期)2022-10-17
科技创新与应用(2022年2期)2022-01-14
成都信息工程大学学报(2021年1期)2021-07-22
机电工程技术(2020年10期)2020-11-27
计量学报(2020年2期)2020-04-11
湖南大学学报(自然科学版)(2020年2期)2020-03-02
声学技术(2019年6期)2020-01-19
演艺科技(2019年4期)2019-03-30
固体火箭技术(2018年6期)2019-01-18
计算机辅助工程(2017年4期)2018-02-01
