
足底力分布测量系统的研究
2020-08-05 07:04:14张素才
合肥工业大学学报(自然科学版) 2020年7期
张素才, 武 壮, 王 勇
(合肥工业大学 机械工程学院,安徽 合肥 230009)
0 引 言
足底力是反映人体生物特征的一个重要参数,医学上评估足底力的参数有最大力、最大压力、地面反作用力、平均压力等。足底地面反作用力的分布情况和人体健康情况密切相关。测量分析足底主要部位的地面反作用力对足部内外翻的评定、脑卒中人群的平衡训练和康复程度评价以及糖尿病人群足部变形定量诊断等有着重要作用[1-2]。目前,临床上足部地面反作用力分布精准测量的设备存在着寿命短和精准性低等不足。
足底力测量始于20世纪90年代,经过近些年的发展,足底力的测量研究达到相对成熟的阶段。目前应用于足底力测量的设备主要为测力台以及压力鞋和鞋垫系统[3]。瑞士Kistler的测力台主要是测量人体足底总的地面反作用力,具有精度高、抗载能力强和操作方便的优点,但是存在价格昂贵和测量点没有针对性的不足;美国F-Scan公司和比利时的RS-scan公司的压力鞋及鞋垫系统主要是测量人体足底和地面接触压强的大小,具有良好的适应性和测量范围大的优点,但存在寿命短和测量点针对性不强等不足。国内也有相关研究,文献[4]采用200个微型传感器搭建了足底压力分布测量系统,可以测出足底诸多小区域的压力,有着较高的精度,但是系统价格昂贵并且没有对足底主要部位进行合理划分;文献[5]开发了一种基于FSR402薄膜传感器的足底压力测量系统,可测得足底4个部位压力,系统具有较高的灵活性,但是存在着寿命短和传感器位置无针对性的不足,且基于薄膜传感器研制的足底力测量系统都存在寿命短和针对性不强等不足。
针对目前足底力测量方法存在的测量点针对性不足、测量范围小以及寿命短等问题[6],本文在分析人体足部生物解剖结构和足底受力特征的基础上,结合码数不同的健康人群足部生物骨骼数据,提出一种将足底划分为第一跖骨头和趾骨、第二跖骨头~第五跖骨头和趾骨、足跟3个测量区域,可适应38~43码人群的足部力分布测量系统;采集了18例38~43码实验者足底3个主要受力部位地面反作用力信息,实验者年龄为(26±5)岁、体质量为(70±15) kg。实验结果进一步验证了本文系统的准确性。
1 足底力测量区域划分依据
根据文献[7-8],可知足部主要受力部位为足跟、跖骨区和趾骨区。静止站立状态下,足部受力部位为近节趾骨头、跖骨头和足跟,其中主要受力的跖骨头为第一跖骨头、第二跖骨头以及第三跖骨头~第五跖骨头,主要受力的近节趾骨头为第一近节趾骨头。
由文献[9]可知,我国足部长度为213.0~264.0 mm(33~43码)的成年人占成年人总数的90%以上。将33~43码分为33~37码和38~43码2个研究区间,本文研究的系统适应范围为38~43码区间。在医院影像科采集15例长度为240.0~265.0 mm(38~43码)且无外伤、无疾病和变形的足部骨骼数据,见表1所列。表1中,点A、B、C位置如图1所示。

表1 健康人群足部生物骨骼数据 mm

图1 足部骨骼测量标记点
由表1可知,38~43码人群足部第一跖骨头和近节趾骨外侧点B距其最内侧点C的最大宽度为28.8 mm、最小宽度为24.9 mm;第二跖骨头和近节趾骨最内侧点A距足部最内侧点C最大宽度为39.6 mm、最小宽度为30.3 mm。38~43码人群第一跖骨头和近节趾骨外侧点B与第二跖骨头和近节趾骨最内侧点A距足部最内侧点C之间的公共间隙为1.5 mm,说明38~43码人群第一跖骨头和近节趾骨与第二跖骨头之间存在可划分间隙。由于不同码数人群的第二跖骨头和第三跖骨头位置相互重叠,很难精确区分,将第二跖骨头和第三跖骨头~第五跖骨头划为一个受力区域。因此根据测得的数据把足部受力区域划为3个部分:第一跖骨头和趾骨为第1部分,第二跖骨头~第五跖骨头和趾骨为第2部分;足跟为第3部分。第1、第2部分合称为前脚掌。由于足弓处受力过小,跖骨区和足跟划分位置为楔骨。
2 系统的组成
本文研究的系统主要由足底力检测模块、信号采集及处理模块和数据显示的上位机显示模块3个部分组成。其中足底力检测模块用于测量不同姿态下足底3个区域的地面反作用力;数据采集模块主要对采集的信号进行滤波、放大和读取等处理;上位机模块主要用于实时显示实验者的足底力分布信息。
2.1 足底力检测装置
根据划分测量区域的数据,设计了足底力检测装置,主要包括足跟挡板、足部内侧挡板、第一跖骨头和趾骨托板、第二跖骨头~第五跖骨头和趾骨托板、底部支撑板、称重传感器和足跟托板。托板尺寸根据测量数据间隔分开,为了更好地减小操作误差,根据所测得的第一跖骨头和第二跖骨头的间隙,足底第一跖骨头和趾骨托板设计宽度为26 mm,足底第一跖骨头和趾骨托板与第二跖骨头~第五跖骨头和趾骨托板之间的间距为4.5 mm,跖骨头区和足跟的分割区间为足跟到楔骨的公共区间。由于测量数据起始点为足部内侧位置和足跟,需要设置定位结构,保证相应的托板承接对应的足底部位。结构1、结构3分别为足跟挡板、足部内侧挡板,用于对足跟和足部内侧进行限位。在足部托板下分别放置称重传感器用于测量相应区域的力。选择中航电测公司L6N-C3-X-3B6的单点式称重传感器来测量足底的地面反作用力。由于左右脚对称,只给出右脚足底力测量装置的示意图,如图2所示。

1.足跟挡板 2.足跟托板 3.足部内侧挡板 4.第一跖骨头和趾骨托板 5.底部支撑板 6.第二跖骨头~第五跖骨头和趾骨托板 7.称重传感器图2 足底力测量装置(右脚)
2.2 数据采集系统
基于Compact RIO平台开发多路数据采集系统,采用compact RIO混合编程模式,即数据采集系统分为现场可编程门列阵(field programmable gate array,FPGA)层和Real Time(RT)层混合编程,FPGA层主要完成I/O模块配置、信号快速处理及与9205模块相关的底层任务等,RT主要完成对信号进行处理、存储、分析等操作。
由于称重传感器输出的电压信号为毫伏级,一般不直接进行数据采集,在输入9205模块之前需要对信号进行滤波和放大处理,提高测量准确性和精度。首先对信号进行滤波处理,由于99%的足底力信号频率不大于15 Hz,滤波器的截止频率为36.2 Hz。放大电路的放大器芯片为AD8422,该放大器具有较高的共模抑制比和低漂移优点,能够很好地抑制共模噪声和零点漂移,是调理称重传感器惠斯特电桥信号的理想选择。根据9205模块的分辨率,对电压信号放大100倍,设计的放大器原理如图3所示。

图3 信号调理电路
数据采集系统的FPGA层根据足底力采集模块配置差分采集模式,采用差分可以有效抑制共模噪声,提高测量准确度,设置I/O通道如图4所示。把数据传输到与RT层数据通讯的先入先出(first input first output,FIFO)队列中,设置FIFO的长度,并检测FIFO队列存储是否溢出,若有溢出则停止。在RT层首先调用FPGA模块,设置FPGA的采样频率,由于FPGA采集数据频率为系统6路总采样频率,设置系统的采样频率为500 Hz;然后对FPGA的通道数进行设置,数据默认写入FIFO中,设置RT层读取FIFO的频率,一般读取频率等于FPGA层的采样频率,可防止FIFO溢出,即设置单周期循环时间。Real Time层程序框图如图4所示。FPGA中是6路数据一起打包写入FIFO中,需要在RT层把采集的数据拆分为6个数组。处理好的数据将传入上位机作进一步处理。

图4 Real Time层程序框图
2.3 足底力信息采集界面
基于Labview开发的上位机能够实时显示足底力测量信息,上位机的功能主要包括数据处理、显示以及存储。存诸的电压信号输入上位机,根据下文标定的称重传感器的灵敏度转化成足底力数值,并进一步求解出足底各部位的力占实验者体质量的百分比。
上位机界面如图5所示。其中,左侧为测试者信息,包括测试者的体质量、身高、年龄信息;右侧为实验者足底力数据信息及信号异常警报。足底力信息为足底划分的第一跖骨头和趾骨、第二跖骨头~第五跖骨头和趾骨、足跟3个部位的地面反作用力占实验者总体质量百分比;信号异常警报功能是指当系统用于临床时,界面中的健康数为医护人员填写健康人群足底各部位占体质量比例范围的最大值与最小值,将系统测出的测试者足部各部位地面反作用力占体质量的比例与健康数比较,超出所设置的上、下限时警示灯将由绿色变成警示红色,提供基本的判断。

图5 足底力信息采集界面
3 实 验
3.1 实验准备
足跟和前脚掌的地面反作用力分别约占体质量的50%~70%和30%~50%[10-12],因此第一跖骨头和趾骨托板下放置量程为30 kg的传感器,第二跖骨头~第五跖骨头和趾骨托板下放置量程为50 kg的传感器。足跟托板下放置量程为100 kg的传感器。
实验前需对6个称重传感器进行标定,利用标准力检测输入力与输出电压的关系,规定传感器输入电压为5 V。标定步骤为:① 记录称重传感器在空载时的电压值;② 给称重传感器加载砝码,以1 kg间隔加载,加载至10 kg,记录每次加载砝码稳定后一段时间内的数值,求其平均值。
将采集到的数值记录制图,如图6所示。
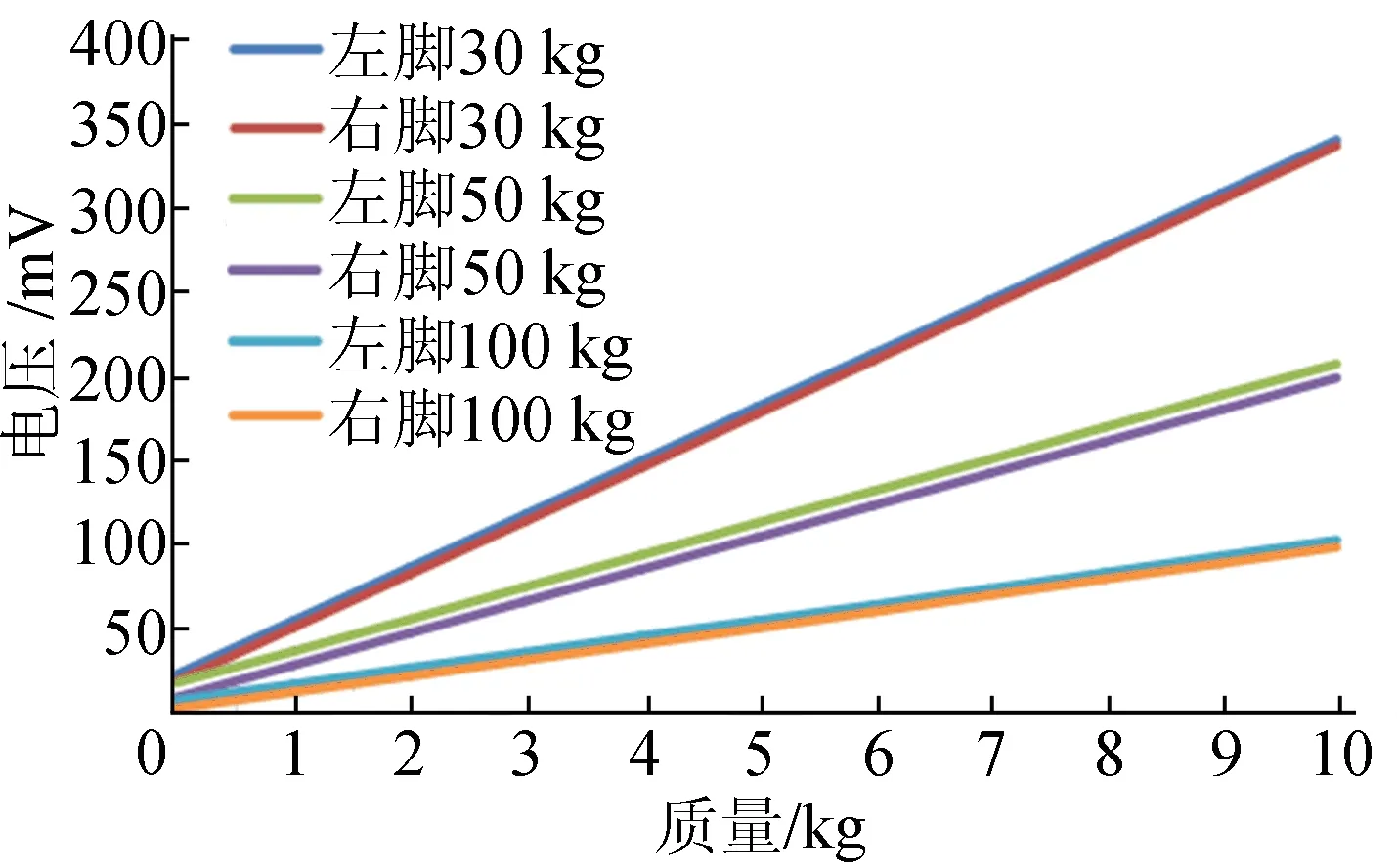
图6 称重传感器特性曲线
对所采集的数据进行线性拟合,得到拟合方程。灵敏度的计算公式为:
S=Δy/Δx=dy/dx
(1)
根据(1)式分别计算30、50、100 kg称重传感器的灵敏度,得到S30=31.74 mV/kg、S50=18.93 mV/kg、S100=9.56 mV/kg。
3.2 系统测试
在实验前需要对系统的精度进行测试。给左、右脚足底力测量装置的第一跖骨头和趾骨托板、第二跖骨头~第五跖骨头和趾骨托板以及足跟托板分别施加1~10 kg的M3级砝码,得到各部位托板输出质量,计算每次施加砝码时各托板输出的数值,结果见表2、表3所列。
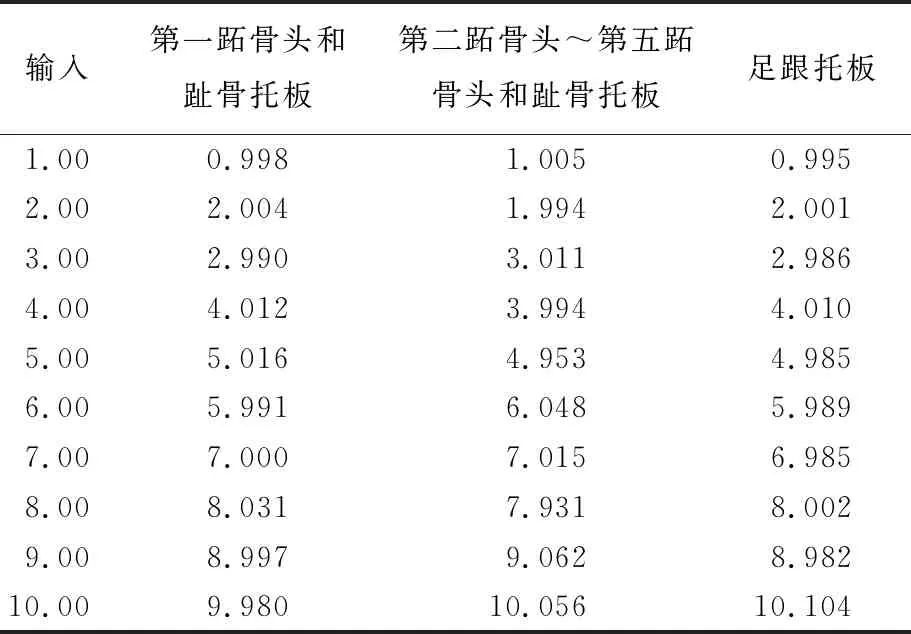
表3 右脚足底力测量装置各托板的输出值 kg

表2 左脚足底力测量装置各托板的输出值 kg
误差计算公式为:
Δ=(x-x测量)/x
(2)
根据(2)式计算左、右脚测量装置各托板的误差,得到左、右脚足底力测量装置各托板的最大测量误差为:
Δmax左脚第一跖骨头和趾骨托板=0.35%,
Δmax左脚第二跖骨头~第五跖骨头和趾骨托板=0.75%,
Δmax左脚足跟托板=0.87%;
Δmax右脚第一跖骨头和趾骨托板=0.39%,
Δmax右脚第二跖骨头~第五跖骨头和趾骨托板=0.86%,
Δmax右脚足跟托板=1.04%。
由系统误差参数可以看出,本文研究的系统有较高的测量精度。
3.3 实验
选定20位健康实验者,足部长度在38~43码范围且正常、无形变和病态,年龄(26±5)岁,体质量(70±15) kg。测量时足底测量装置内侧距离为60 mm,实验者赤脚站在测量装置上,且左、右脚的内侧分别靠在装置的足部内侧挡板、足跟后侧靠在足跟挡板,规定测试者姿态为自然状态下站立,小腿与地面处于垂直状态、手臂自然垂直放下,站立时长30 s。自然静态站立时,左脚、右脚的地面反作用力占体质量的(50±2)%[13],因此满足该条件时,系统自动记录实验数据。重复5次实验,记录实验者左、右脚各部位的地面反作用力,计算5次足底所划分的各部分力占体质量的百分比,取平均值。
20例实验者中有2例站姿存在问题,重心偏右,左、右脚受力占体重比的差距高达20%,不满足实验要求,因此剔除。
测得的18例实验者足部各部位地面反作用力占体质量的比例如图7所示。

图7 足部各部位处地面反作用力占体质量比例
由图7可知,健康人群在自然状态站立时,左、右脚各部位处地面反作用力占体质量的百分比情况一致,左、右脚第一跖骨头和趾骨处地面反作用力占体质量的百分比在4.5%上下波动;左、右脚第二跖骨头~第五跖骨头和趾骨处地面反作用力占体质量的百分比在13%上下波动;左、右脚前脚掌处地面反作用力占体质量的百分比在18.0%上下波动;左、右脚足跟处地面反作用力占体质量的百分比在32.3%上下波动。双足3个部位的地面反作用力对应之和占体质量的比例见表4所列。

表4 双足3个部位受力占体质量比例 %
由表4可知,双足第一跖骨头和趾骨处的地面反作用力占体质量(9.19±3.25)%,双足第二跖骨头~第五跖骨头和趾骨处的地面反作用力占体质量(25.67±7.30)%,双足前脚掌处的地面反作用力占体质量(34.66±6.37)%,双足足跟处的地面反作用力占体质量(65.33±6.37)%。测量的足底各部位地面反作用力分布符合足底力分布规律,说明本文系统可以满足精准测量不同码数人群足底3个主要受力部位地面反作用力分布的需要。
4 结 论
本文在分析人体足部生物骨骼和足底受力分布特征的基础上,提出了一种足底分区测量方法,根据不同码数健康人群的足部生物骨骼数据,研究了一种把足底划分为第一跖骨头和趾骨、第二跖骨头~第五跖骨头和趾骨、足跟3个测量区域,可适应38~43码人群的足底力分布测量系统。
实验结果表明:① 不同码数人群足底各部位的地面反作用力分布具有一致性,双足第一跖骨和趾骨处地面反作用力占体质量(9.19±3.25)%,第二跖骨头~第五跖骨头和趾骨处地面反作用力占体质量(25.67±7.30)%,前脚掌处地面反作用力占体重(34.66±6.37)%,足跟处地面反作用力占体重(65.33±6.37)%,验证了本文系统对不同人群足底3个区域划分的正确性;② 系统能精准测量不同码数人群足底3个部位的地面反作用力的分布信息,能适应38~43码人群的测量要求。
足底力分部信息可以反映脚的内外翻程度的诊断、康复程度,本文系统用于临床时,所测得的数据可以为医护人员对脚内外翻程度的诊断、康复程度的评估等提供数据依据,具体对应关系有待和医护人员探讨以及后续研究。
猜你喜欢
煤炭工程(2022年11期)2022-11-24 00:59:06
体育科研(2021年3期)2021-05-29 08:44:12
阅读(科学探秘)(2020年11期)2020-12-28 07:00:38
发明与创新·中学生(2020年1期)2020-08-03 03:34:33
发明与创新(2020年2期)2020-01-06 09:03:30
四川建筑(2018年4期)2018-09-14 01:11:58
畅谈(2018年19期)2018-01-22 08:36:02
课堂内外·教师版(2017年12期)2018-01-19 09:11:18
外科研究与新技术(2016年2期)2016-12-22 02:29:34
科学中国人(2016年35期)2016-01-28 15:15:53
