
基于模糊PID复合控制的汽车主动悬架性能研究
2020-08-04 09:39董瑞吴慧峰
桂林航天工业学院学报 2020年2期
董瑞 吴慧峰
(1 桂林航天工业学院 实践教学部,广西 桂林 541004; 2 桂林航天工业学院 电子信息与自动化学院,广西 桂林 541004)
悬架作为车架与车轮的中间环节,承担着车轮与车架之间力的传递,悬架性能好坏直接影响汽车行驶的平顺性、可操控性和路况适应能力。传统被动悬架,具有固定不变的刚度,对路况的适应能力较差[1]。主动悬架在传统悬架结构的基础上增加了一个力调节装置,可以根据汽车的运动状态和路面反馈激励的大小主动反应,连续不断施加调节力[2],对于提高车辆安全性、可操控性和乘坐舒适度等具有独特优势。
采用主动悬架,必然涉及主动悬架系统控制策略的设计,传统PID控制[2],对线性系统具有较好的控制能力,控制的精度比较高,鲁棒性较好,但其存在的突出问题是对复杂非线性系统控制力弱,对系统突变信号适应和调节能力差;模糊控制[3]作为一种智能控制方法,恰好可以弥补传统PID控制存在的问题,尤其对非线性突变信号具有很好的控制效果,但相对传统PID控制,也存在静态稳定性差的缺点。本文从提高悬架系统动态调节能力和静态稳定性角度考虑,将模糊控制和PID控制相结合,设计了模糊PID复合控制器。在MATLAB/Simulink仿真环境中,建立了1/4车体两自由度主动悬架的数学模型和路面激励源模型,
并构建了针对该模型的PID控制系统和模糊PID复合控制[4]系统,通过同步仿真,发现两种控制策略下悬架在时域内的动态响应差异,本研究可为汽车主动悬架控制策略设计提供理论参考。
1 汽车悬架模型建立
主动悬架系统控制基本机理是利用传感器测量悬架上方车架和悬架下方车轮的速度、加速度,所测得的模拟信号传递给中央控制器。中央控制器对接收的信号进行分析处理以产生控制信号,并将控制信号传递给主动悬架的力调节装置,以产生与车架和车轮加速度相适应的逆向调节力,该调节力可以降低车架加速度,维持车架的平稳。本文将力调节装置作理想化处理,由中央控制器直接产生调节力。将车架质量、车轮质量分别用m1、m2表示,车轮刚度和悬架弹簧刚度分别用k1、k2表示,地面、车轮和车架的垂直位移分别用z0,z1,z2表示,悬架等效阻尼系数用C表示,主动调节力用U表示,可得1/4车体悬架两自由度模型,如图1所示[5]。

图1 悬架系统简化模型
根据牛顿第二定律可得到该模型运动微分方程组如式(1)和式(2)所示:

(1)
(2)
2 仿真设计及结果分析
模糊PID复合控制的基本思路是利用模糊算法在线实时调整PID控制中比例、积分和微分环节的系数,以克服传统PID控制器一经整定各系数就固定不变的缺点,提高PID控制器动态适应性。由于车身垂直加速度是影响人体舒适度的最主要因素,所以本文把车身垂直加速度作为悬架性能的评价指标[6]。本文利用MATLAB的GUI工具箱建立路面激励仿真模型、模糊推理系统和系统仿真模型[7],应用MATLAB/Simulink软件进行计算机模拟仿真,在路面输入一致的情况下,分别对PID控制和模糊PID复合控制下主动悬架模型车身垂直加速度响应进行对比分析。
2.1 路面激励模型
路面系统微分方程如式(3)所示:
(3)
其中,u为汽车行驶速度,ω0为系统截止角频率,n0为参考空间频率(取0.1 m-1),w(t)为模拟白噪声信号,q(t)为外施激励信号,即路面谱时域信号。由于ω0=2πn0u,故得
(4)
利用MATLAB/Simulink建立普通路面通用仿真模型如图2所示。

图2 路面模型

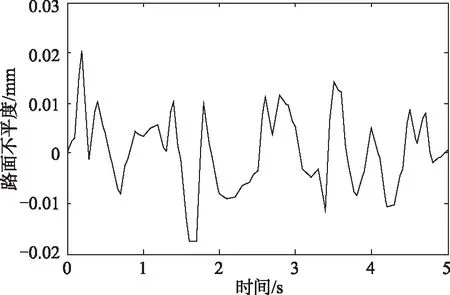
图3 C级路面模拟曲线

图4 E级路面模拟曲线
2.2 模糊控制器设计
选取车身垂直速度E和车身垂直加速度EC作为模糊PID复合控制器的输入变量。E和EC论域均取为:-5~5,其模糊集分为七级:{负大偏差,负中偏差,负小偏差,近零偏差,正小偏差,正中偏差,正大偏差},对应标记为{NB,NM,NS,ZO,PS,PM,PB}。设定模糊PID复合控制器三个输出控制量[8]分别为ΔKp、ΔKi、ΔKd,论域均取为:-5~5,输出控制量模糊集根据偏差大小也分为七级{NB,NM,NS,ZO,PS,PM,PB}。根据实际经验,确定模糊PID复合控制器模糊规则如表1-表3所示[9]。

表1 ΔKp规则表

表2 ΔKi规则表

表3 ΔKd规则表
2.3 悬架系统仿真模型及仿真
参照某款轿车,确定汽车悬架模型仿真参数如表4所示。在MATLAB/Simulink中建立该主动悬架控制系统的仿真模型如图5所示。其中out1子系统为路面激励生成模拟系统,由其分别产生不同车速下C级和E级路面模拟信号。

图5 悬架系统仿真模型

表4 模型参数表
在同步路面激励信号作用下,分别通过PID控制系统和模糊PID复合控制系统对主动悬架进行控制作用仿真。
2.3.1 阶跃输入信号
为观察系统对路面低频大冲击信号的响应情况,特给定一幅值为1的阶跃输入信号,得到的响应曲线如图6所示。相对单纯PID控制系统,加速度峰值降低了约32%,若垂直加速度降至20 m/s2以内视为基本稳定,则系统调节时间降低约45%。可以看出,采用模糊PID复合控制的系统对路面低频大冲击信号的调节能力更强,加速度峰值更小,稳定更快。

图6 阶跃输入悬架垂直加速度响应
2.3.2 等级路面输入信号
为进一步验证在不同路面条件下系统的适应能力和稳定性,分别选取车速144 km/h的C级路面条件和车速72 km/h的E级路面条件模拟曲线作为输入信号[10] [11],得到C级路面条件下的响应曲线如图7所示,E级路面条件下的响应曲线如图8所示。可以看到,在不同车速条件和不同路面等级条件下,采用模糊PID复合控制策略相比采用传统PID控制策略悬架垂直加速度峰值减少约28%。
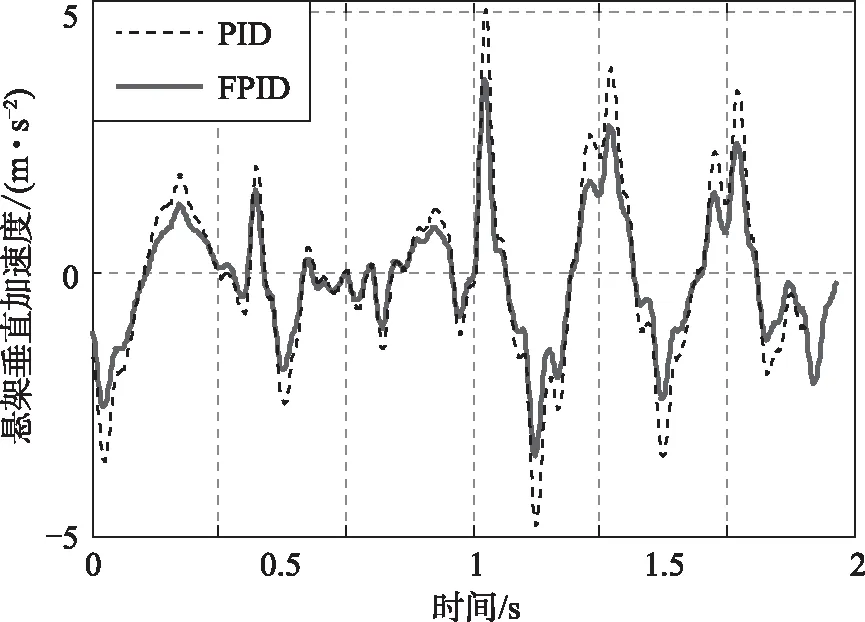
图7 C级输入悬架垂直加速度响应

图8 E级输入悬架垂直加速度响应
3 结语
本文针对建立的二自由度1/4车体汽车主动悬架系统的仿真模型,在低频大冲击信号和中高车速的C级、E级路面条件下,分别对采用PID控制、模糊PID复合控制策略的悬架系统响应性能进行对比性仿真研究。研究表明,采用模糊PID复合控制策略相对单纯PID控制策略在不同路面等级和不同车速条件下均能大幅度降低悬架垂直加速度峰值,降低的幅度大致在28%。且在低频冲击信号激励下,采用模糊PID复合控制策略更有利于系统尽快进入稳定区间,系统调节能力更强。采用模糊PID复合控制策略更有利于提高车辆的操纵稳定性和乘坐舒适度。本文所设计的模糊PID复合控制器是有效的,对汽车主动悬架控制系统的应用设计具有一定参考价值。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
汽车实用技术(2022年16期)2022-08-31
物流技术与应用(2022年5期)2022-06-17
遥测遥控(2022年1期)2022-02-11
中国自行车(2018年4期)2018-05-26
中国惯性技术学报(2017年1期)2017-06-09
北京汽车(2016年6期)2016-10-13
现代制造技术与装备(2015年4期)2015-12-23
汽车零部件(2014年5期)2014-11-11
组合机床与自动化加工技术(2014年10期)2014-03-01
