
园林景观设计中的三维虚拟成像系统设计
2020-08-03 08:05温泉
现代电子技术 2020年6期
温泉

摘 要: 针对原有三维虚拟成像系统清晰度较低的问题,文中设计园林景观设计中的三维虚拟成像系统。通过制定硬件设计框架,根据框架选择图像采集器进行图像采集,通过计算机对图像进行滤波降噪处理,将处理后的图片通过激光折射输出,采用感光器以及透传模块进行虚拟成像;制定软件设计框架,通过卷积神经网络计算对采集到的图像进行降噪处理,并采用像素灰度计算得到原图像特征点,采用C语言对虚拟成像进行设定并输出,由此完成软件设计。结合上述硬件与软件设计,完成园林景观设计中的三维虚拟成像系统设计。构建对比试验,与原有系统对比,所设计系统在清晰度上有显著的提升,原有系统清晰度为82%~85%,此系统图像清晰度为85%~90%。由此可见,文中设计方法更有效。
关键词: 虚拟成像; 园林景观; 系统设计; 数据采集; 仿真实验; 结果分析
中图分类号: TN911?34; TU986.2 文献标识码: A 文章编号: 1004?373X(2020)06?0160?03
Design of 3D virtual imaging system in garden landscape design
WEN Quan
(College of Architecture and Urban Planning, Chongqing Jiaotong Universuty, Chongqing 400074, China)
Abstract: A 3D virtual imaging system in garden landscape design is designed to improve the low definition of the original 3D virtual imaging system. The hardware design framework is established, by which the image collector is selected for the image collection. The images are performed the filtering and de?noise processing by the computer, the processed images are output through the laser refraction, and the photoreceptor and passthrough module are used for virtual imaging. The software design framework is established, the collected images are de?noised by the calculation of the convolutional neural network, and the feature points of the original image are obtained by the pixel grayscale calculation, and the virtual image is set and output by means of the C language, so as to complete the software design. In combination of above?mentioned hardware and software design, the design of 3D virtual imaging system in the garden landscape design is completed. The contrast test is constructed, in comparison with the original system, the definition of this system has a significant improvement, in which the definition of the original system is 82%~85%, and the definition of this system is 85%~90%. It can be seen that this method is more effective.
Keywords: virtual imaging; garden landscape design; data collection; simulation experiment; result analysis
0 引 言
随着建筑技术的不断发展,人们在小区内设计相应的园林景观成为新的选择[1]。园林景观是建筑设计中的灵魂支柱,它直接代表了建筑设计的品位与档次。通常园林景观可以分为两类[2]:一类是通过体验感知的场景;另一类则是以实景进行展示。通常在进行园林设计时,传统的方法已无法使设计结果直观展示在人们面前。
在进行建筑设计时,为将设计图纸可以具象化地展示出来,一般会采用三维虚拟成像技术。通过采用该技术,将平面设计图纸以立体的形式进行展示,使设计结果增加接近物体的本身[3]。本文针对传统成像系统图像分辨率较低、系统结构过于单一等问题,设计园林景观设计中的三维虚拟成像系统。利用该系统进行园林景观的呈现,使园林景观设计更加简易,有效提升园林景观的科技性,为日后園林设计提供更加有力的技术支持。
1 三维虚拟成像系统硬件设计
1.1 硬件框架设计
根据对虚拟成像技术的了解,对园林景观设计中的三维虚拟成像系统硬件进行设计,具体设计框架见图1。
该系统硬件设定为图像采集器与虚拟成像设备两部分。图像采集器包括相机捕捉器、单片机、图像传感器、图像控制器以及神经网络加速器。虚拟成像设备由计算机、投影设备以及感光器、激光放大器、ESP8266透传模块组成[4]。
1.2 图像采集器设计
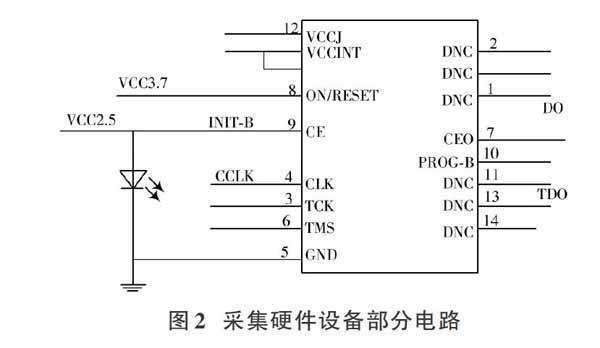
在进行较大图像采集时,大多使用PC机为主的单片机作为图像采集的中心仪器。园林景观设计中的三维虚拟成像系统采集硬件选用SoC芯片对图像进行初始采集工作[5]。选用SONY IMX323 图像传感器、相机图像捕捉器、ARM9 12C控制器、神经网络加速器以及对应可控制器的信息存储促成图像采集硬件。通过采用SCCB协议,对图像传感器进行配置设计。图像采集设备部分电路图如图2所示。
通过电路对园林设计中的图像进行采集,此电路包含1个放大器与部分电阻。将电流整体设定为3.7 V,采用标准电流控制图像采集设备,可以有效保障在进行图像采集时,不受电流压力的影响[6]。在原有电路中增加稳压器保证电压的稳定,通过这种操作保证进行图像采集时的稳定性。
1.3 虚拟成像设备设计
通过采用三维光线将园林景观设计成果呈现在空中,需要进行光线设计以及控制单元设计。
通过计算机系统将园林设计成果进行合成处理,使用全息投影技术,将处理后的图像进行展示[7]。采用激光作为光源进行虚拟成像,将激光灯发射的光源分成两个部分:一部分直接射向感光片;另一部分通过光线放大器后折射至感光片,通过感光片对光线进行控制。
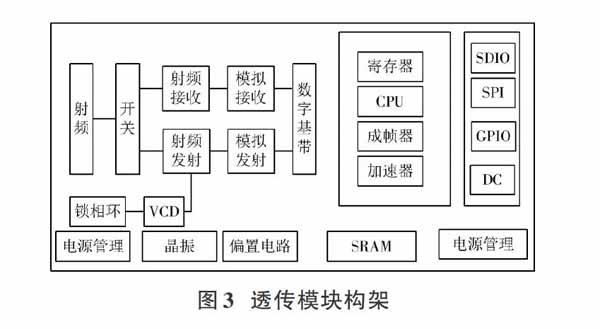
在进行虚拟成像时采用ESP8266透传模块进行控制,通过采用该设备,将处理后的图像通过电脑发送至透传模块,在模块内进行二次处理,而后进行模拟发射,将发射的图像通过激光发送至感光片完成虚拟成像。
2 三维虚拟成像系统软件设计
软件设计包括原始图像采集模块、图像制作模块以及虚拟成像模块。
1) 图像采集模块
在进行园林景观虚拟成像设计时,首先需要进行图像采集,与原有图像采集不同的是三维虚拟成像技术需要应用相机成像模型对虚拟物体进行成像,得到当前设计条件下的仿真图像[8]。
为保证图像的清晰度,对图像进行降噪处理。设定图像采集样本,具体公式如下:
式中:[X]为原始图像;[Y]为采集后在樣本中分布的噪声图像;N为输出层预测的噪声。通过采用卷积神经网络[9]将图像样本以矩阵形式进行排列。设定加噪图像为矩阵为[f],平均矩阵为[g]。通过量化标准式处理图像,以避免在进行卷积后出现网络内部协变量转移。通过卷积公式进行图像处理,具体公式如下:
通过采用未激活神经元与参数进行图像重构,并将残余图像进行输出,将输出后的图像数据进行二次制作。
2) 图像制作模块
通过上述部分进行图像采集,并将采集到的图像进行统一处理。通过Moravec算法将图像进行像素点灰度变化操作[10],并进行深度计算,将像素点设定为[(x,y)],则4个方向的灰度差平方和公式如下:
将待测点中的极值作为特征点,设定窗口范围,求出灰度差平方和最大值。通过对特征点提取,对采集完的图像进行处理,根据特征将图像进行调整,保证图像位置的正确性。
3) 虚拟成像模块
根据上述模块对图像进行采集与处理,将处理后的图像通过虚拟成像模块实现三维虚拟成像。基于对三维虚拟成像硬件的设计,在进行虚拟成像时采用计算机进行最后图像输出时的控制,采用C语言虚拟成像。输出图像经过感光器以及放大器的共同作用,实现虚拟成像。至此,园林景观设计中的三维虚拟成像系统设计完毕。
3 实验论证分析
为保证园林景观设计中的三维虚拟成像系统的科学性,将其与原有的虚拟成像系统进行对比试验,检验三维虚拟成像系统的图像清晰度。
3.1 实验准备过程
为保证实验的有效性,选择园林景观设计图纸中的部分图像进行虚拟成像处理,使用原有虚拟成像系统与本文设计系统分别进行虚拟成像,并对成像结果清晰度进行对比。对实验设备参数进行设定,具体如表1所示。通过上述参数,对园林景观进行虚拟成像。选择20幅园林景观进行试验,共进行3次虚拟成像,并对清晰度进行计算分析。
3.2 实验结果分析
将本文设计系统采用系统1进行表示,原有系统采用系统2进行表示,如表2所示。通过表中数据可以看出,本文设计虚拟成像系统清晰度大都在85%~90%之间,原有成像系统清晰度大都在82%~85%之间,说明本文设计虚拟成像体系清晰度明显高于原有虚拟成像体系。由此可见,本文设计虚拟成像系统在清晰度方面取得了很好的效果。通过上述结果,在园林景观设计中采用本文设计的虚拟成像系统后,其清晰度明显高于行业平均水平。采用本文设计虚拟成像系统可以将园林景观以简单直接的方式呈现。本文设计的三维虚拟成像系统完全适用于园林景观设计。
4 结 语
随着我国三维虚拟成像技术的不断普及,将该技术应用在各行各业之中,通过对园林景观进行三维虚拟成像可以在设计中及时发现园林设计的不足之处,并加以改正。通过使用这种技术将虚拟的景观具象化成像,保证了人们可以充分感知达到设计者的感受。基于目前的虚拟成像技术,还应当不断加强对于成像技术的研究,不断提升设备的科学性与可行性,从而,将这门技术应用得更加熟练。
参考文献
[1] 王长柳,麦贤敏,赵兵,等.风景园林合理分布三维图像仿真系统设计[J].计算机仿真,2017,34(8):265?268.
[2] 刘东云,郭再斌,段旺.基于BIM技术的景观复杂曲面高精度控制:奥体文化商务园中心绿地设计实践[J].中国园林,2017,33(3):125?128.
[3] 刘培刚,刘钰洋,潘懋,等.基于砂岩三维数字岩心图像的图像处理与相划分研究[J].科学技术与工程,2017,17(6):22?30.
[4] 王会,巨欢,方阳,等.基于GRT?CLEAN的高速旋转目标快速三维成像方法[J].液晶与显示,2018,33(3):228?237.
[5] 李加忠,程兴勇,郭湧,等.三维实景模型在景观设计中的应用探索:以金塔公园为例[J].中国园林,2017,33(10):24?28.
[6] 翟宇佳.基于浸入式虚拟环境技术的景观空间尺度感教学模块构建与应用[J].中国园林,2018,34(4):73?78.
[7] 陈亮,熊坚,郭凤香,等.基于视觉及认知的驾驶模拟器图像标定方法[J].中国公路学报,2017,30(1):129?135.
[8] 唐铂,李振华,王春勇,等.线阵扫描三维成像激光雷达系统[J].激光与红外,2017(11):1358?1364.
[9] 秦悦.基于三维虚拟的机械结构模拟仿真软件设计[J].现代电子技术,2017,40(22):62?64.
[10] 李伟,赵瑞斌,庞明勇.山脉图像轮廓线引导的三维虚拟地形合成[J].计算机辅助设计与图形学学报,2017,29(12):2235?2244.
猜你喜欢
中国教育技术装备(2016年19期)2016-12-27
绿色科技(2016年21期)2016-12-27
软件工程(2016年8期)2016-10-25
软件工程(2016年8期)2016-10-25
中国新通信(2016年16期)2016-10-18
科技视界(2016年24期)2016-10-11
考试周刊(2016年64期)2016-09-22
科教导刊·电子版(2016年18期)2016-07-18
科教导刊·电子版(2016年5期)2016-04-19
科技视界(2016年2期)2016-03-30
