
基于Sysweld的6061铝合金T型接头热力耦合模拟
2020-08-03 02:25供稿李志强
金属世界 2020年4期
供稿|李志强
作者单位:青海高等职业技术学院,青海 海东 810700
内容导读
采用双椭球体热源分布模型,基于Sysweld仿真软件,对6061铝合金T型接头焊接过程进行热力耦合数值模拟仿真。首先通过SolidWorks建立三维模型并导入Visual-Mesh进行网格划分,之后在Visual-Weld中对焊接过程进行模拟仿真,获得了温度场及应力应变的分布情况,然后对焊接过程温度云图及焊件整体形变进行分析。结果表明:熔池金属在焊缝边缘且体积较小,加热面积小、功率密度大,对周围金属的热影响较小,位移误差最大处2.64 mm,焊接应力在夹具处最大,热源选择误差不大,仿真结果可信,可以为后续实验提供指导。
6061铝合金是经热处理预拉伸工艺生产而成的一种高品质合金材料,主要合金元素是镁与硅,并形成Mg2Si相。因其具有中等的强度、氧化效果较好、同时抗腐蚀性和可焊接性良好,使其具有良好的加工性能且加工后不变形、材料致密、易于抛光及上色膜等众多优点,已被广泛应用于航空航天、交通运输、建筑装饰、电子家电、板带、包装、印刷等领域[1]。
目前,大部分企业仍然采用MIG焊来焊接铝合金材料,但是在焊接过程中,因其在高温焊接环境下强度非常低,不足以使熔化形成的熔池金属得到支撑,从而会出现一些焊接缺陷,如焊缝成形不良、塌陷和烧穿等缺陷[2]。另外在焊接中由于铝合金表面的氧化膜极易吸收气体水分,在焊缝金属一次结晶过程中来不及逸出而形成气孔[3]。Javier等[4]比较了不同热输入对6061 铝合金力学性能的影响,母材由于热输入的作用形成不同的区域,热影响区中存在一个硬度最低区域。
在现代工业生产中,焊接质量主要由焊工熟练的焊接技能来保证,而焊接时的线能量多少、焊件温度分布及应力影响难以掌握,需要大量实验。采用数值模拟的方法,利用有限元对温度分布及应力应变进行预测,确定合适的焊接工艺参数。
本文采用双椭球热源模型,利用Sysweld软件,对6061铝合金T型接头焊接过程进行热力耦合数值模拟仿真,计算求解在焊接过程中的焊接温度场、位移及变形、应力应变,分析所选焊接参数的可行性,为后续实验提供参数依据。
T型接头的有限元分析建模
有限元模型建立
焊接件为6061铝合金,翼板尺寸为200 mm×100 mm×4 mm,腹板尺寸为200 mm×50 mm×4 mm,焊脚高4 mm。通过Solidworks进行建模并以IGES格式导出。
网格划分
将由Solidworks导出的IGES格式模型导入到Visual-Mesh进行网格的划分,为保证焊缝及其附近高温区域得到较为精确的温度分布,焊缝区及附近区域划分为密网格,其他区域为疏网格。采用8节点6面体单元对几何模型进行网格划分。整个模型中共有3D单元16974个,22610个节点。根据实际焊接工况,设置了边界条件合约束,其中红色节点限制了z方向位移,为了消除刚体位移,底部选取3节点分别限制x、xy、xyz方向位移,具体网格划分如图1所示。
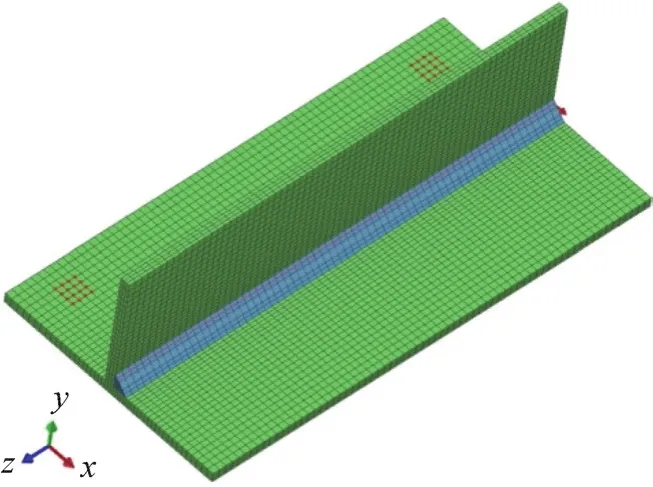
图1 网格的划分
组的创建
由于Sysweld数值模拟是模拟焊接过程中焊枪沿固定轨迹进行起弧焊接,因此采用Visual-Weld软件对焊接件进行分组处理。因实验设备局限,用FNUAC弧焊机器人进行实际焊接操作,焊枪一次性焊接完成一条角焊缝。焊接过程中所需焊接轨迹线、焊接参考线、焊接起始点、焊接终止点、焊接开始单元等条件(见图2)由Visual-Weld完成。
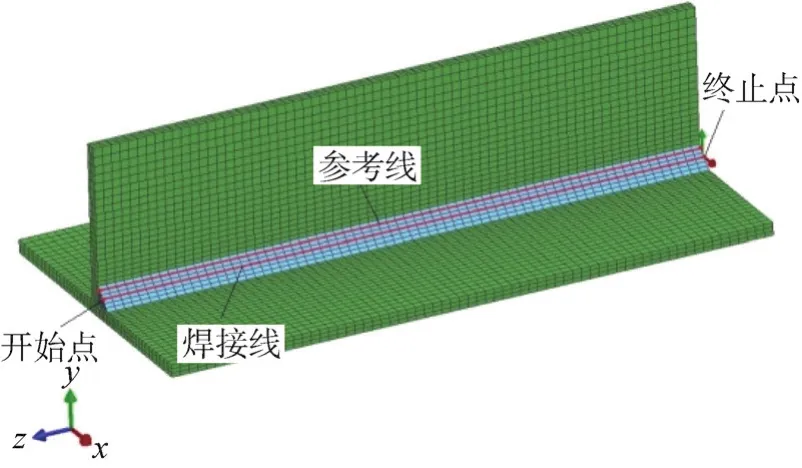
图2 焊接件分组
材料性能参数
为提高模拟仿真结果准确性,鉴于6061热导率大,因而在构件的焊接过程中需了解6061铝合金的热物理性能和机械力学性能参数随温度的变化[5]。在Sysweld仿真软件的材料数据库中,热导率、比热容等热物理性能和杨氏模量、屈服强度等机械力学性能都可以根据材料的变化特征在Sysweld中加载图表。其中,比热容、热导率随温度的变化曲线如图3所示,杨氏模量、屈服强度参数如图4所示。
Sysweld求解
热源数字模型的建立
在MIG焊接的数值模拟中,双椭球热源模型是最为通用的三维模型[5],因在焊接方向上,热源前后能量密度不一致,而椭球形呈几何体状,有着不同的轴长,可以准确反映出焊接方向上的能量密度不对称。在Sysweld模拟软件中,直接调用双椭球模型的热源拟合模型。
在实验过程中,设置了电流和焊接速度两个变量进行尝试性实验,考虑到焊接过程的稳定性、焊缝成形、焊接热影响等因素,最终确定参数为焊接电压:18.75 V,焊接电流:120 A,焊接速度:5 mm/s,焊接线能量:450 J/mm。
焊接向导及求解
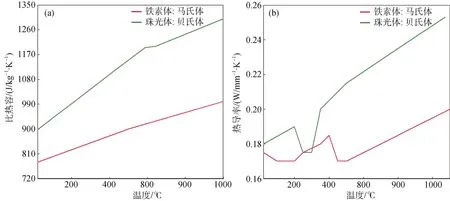
图3 材料的热物理性能参数随温度变化曲线:(a) 比热容;(b) 热导率
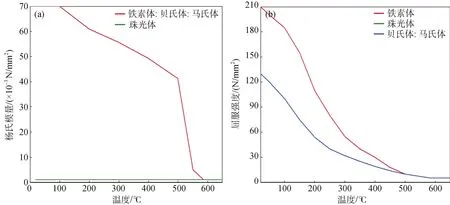
图4 材料的力学性能参数随温度变化曲线:(a) 杨氏模量;(b) 屈服强度
按照所需焊接条件,根据Sysweld焊接向导以及前期所做工作对焊接件进行焊接前处理,具体焊接向导流程如表1所示。检查所有工艺过程数据、边界条件,保证焊接求解过程的准确性,完成所有检查工作,进行计算求解。
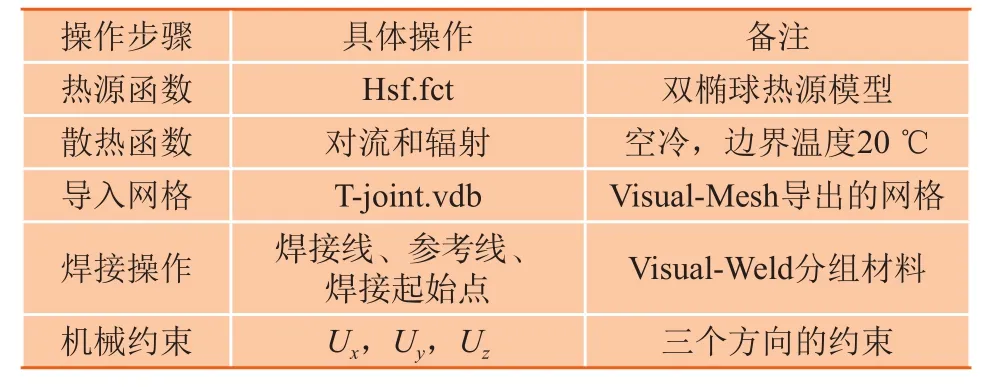
表1 焊接向导流程
数值模拟及分析结果
焊接瞬时温度场分析
6061铝合金热导率大,试件内部热量传递较快,图5为在焊接模拟过程中15 s时刻的瞬时温度场分布云图。从图中可以看出,粉红色部分区域呈现椭球状,黄色、黄绿色、绿色等等温区域也呈现椭球状,整个热源的温度场在构件上呈现椭球分布。热源前段等温线密集,温度梯度大,温度变化剧烈,热源后端等温线稀疏,温度梯度较小,变化较慢,焊缝处金属最高温度达到800 ℃左右。随着热源的运动,焊接温度场处于动态变化过程,其中粉色、红色区域基本上达到焊缝边缘且体积较小,说明此热源在6061铝合金T型接头焊接时满足加热面积小、功率密度大等理想热源的特征,对周围金属的热影响较小,适合焊接。
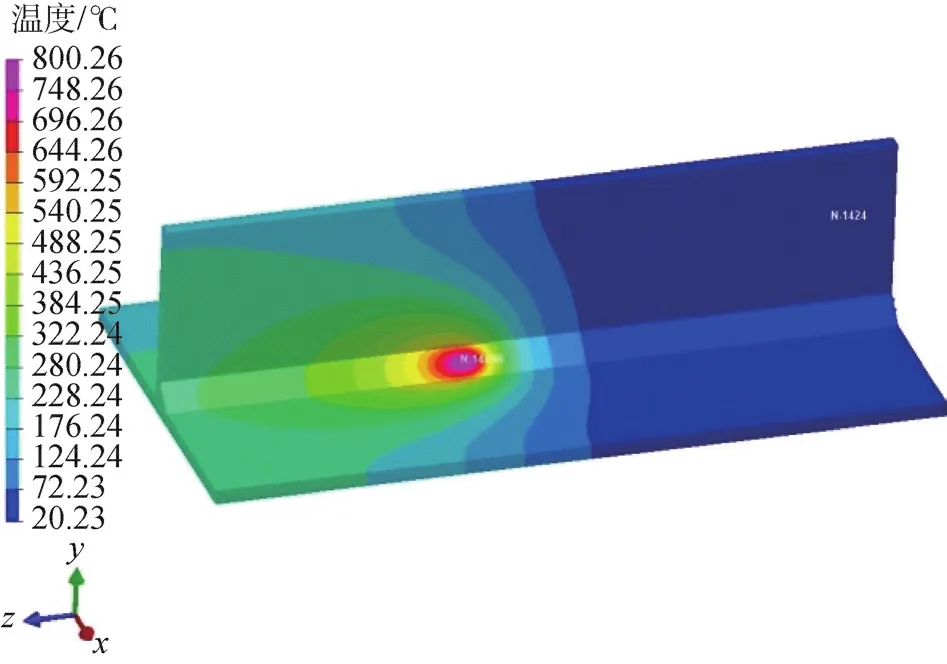
图5 15 s时T型接头瞬时温度场分布云图
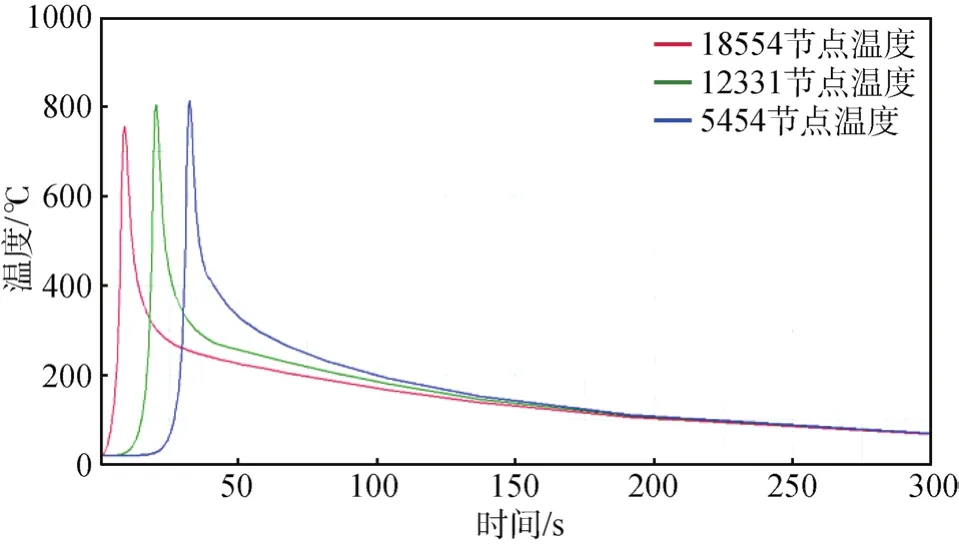
图6 焊缝截面上3节点的热循环曲线
在焊缝横截面上,选取热源及其邻近的3个节点,绘制每个节点的热循环曲线,如图6所示。由图可知,在热源作用下,需要焊接部分加热速度极快,温度迅速上升到800 ℃左右,其他近缝点温度也迅速上升并达到材料的熔点,说明焊接所用线能量满足实际焊接的要求。当温度达到相变温度之后,在相变温度以上的停留时间比较短,说明在焊接过程中,发生相变的时间短,保证了原焊件的性能。当温度达到峰值温度之后,冷却速度也非常快,在5 s内就可以从峰值温度冷却到300 ℃,随后缓慢冷却到室温。
焊接变形分析
在焊接过程中,选取20 s时刻的xOy截面温度场云图,如图7所示。从图中可以看出,焊缝在翼板和腹板的上表面且焊缝处温度处于最高,导致翼板和腹板上下表面靠近焊缝处的节点受热的影响不同,所经历的焊接热循环不同;同样翼板和腹板距离焊缝远近不同的各点,温度分布极不均匀。这种温度极不均匀就导致了焊件在厚度方向上的横向收缩变形,导致构件发生变形。

图7 20 s时刻的xOy截面温度场云图
焊件变形位移量云图如图8所示。从图可知,在翼板焊缝一端,由于受热影响大,并且夹具少,焊接变形量大,最大处可达2.64 mm;腹板上最大位移量在起焊段腹板边缘处,位移量达到1.76 mm,但是只有极少部分,占据整个腹板的比例很小,从整个T型构件尺寸来看,位移量在可控范围内。
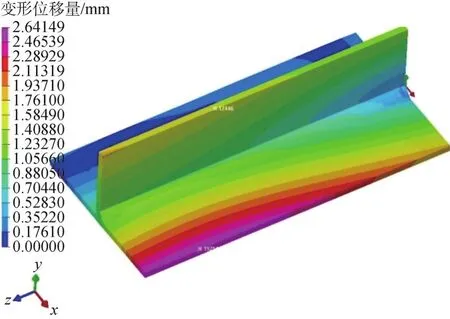
图8 焊接变形位移量
焊接应力分析
构件焊接时的应力云图如图9所示。由图可知,焊缝处存在较大的纵向应力和横向应力,厚度方向应力较小,粉色、黄色区域为焊接时模拟夹具所在位置,应力最大,达到220 MPa。三个方向上的应力是由于各个方向上的收缩变形引起的,纵向和横向应力由于构件尺寸大,焊缝处收缩变形受到周围金属的约束而产生较大的应力分布[5]。
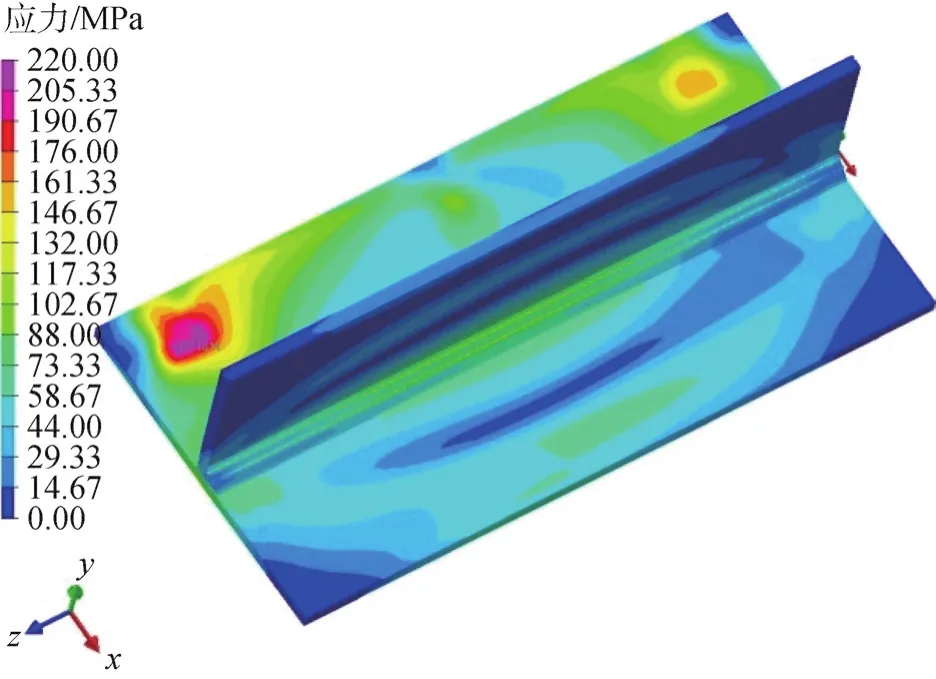
图9 构件焊接时的应力云图
结束语
采用双椭球体热源分布模型,基于Sysweld仿真软件,对6061铝合金T型接头焊接过程进行热力耦合数值模拟仿真,获得温度场、应变场的变化规律,熔池金属在焊缝边缘且体积较小,加热面积小、功率密度大,对周围金属的热影响较小,位移误差最大处2.64 mm,焊接应力在夹具处最大,热源选择误差不大,仿真结果可信,可以为后续实验提供指导。

【封堵铁流】喻跃生
猜你喜欢
导航定位学报(2022年2期)2022-04-11
智能制造(2021年4期)2021-11-04
煤气与热力(2021年3期)2021-06-09
装备制造技术(2020年2期)2020-12-14
中国农资(2019年44期)2019-12-03
中国现代中药(2019年5期)2019-07-03
制造技术与机床(2017年9期)2017-11-27
北京航空航天大学学报(2017年3期)2017-11-23
名家名作(2017年3期)2017-09-15
电子制作(2017年19期)2017-02-02
