掘进机结构的分析及电控系统的设计
2020-07-31 17:54王鹏
机械管理开发 2020年6期
王 鹏
(同煤集团四老沟矿, 山西 大同 037028)
引言
目前,掘进机是在煤矿中使用最广泛的用来完成采掘作业的技术设备,可以进行破煤、掘进、物料回收、运输和除尘等相关的井下掘进开采工作。根据工作方式的不同可以将掘进机分为全断面掘进机和部分断面掘进机,它们有着掘进速度快、机械化程度高和安全性好的优点[1-2]。但是由于井下条件复杂,导致掘进机在工作面进行作业时常有故障发生。此外,一些元件的基础质量和电控系统也不太完善。为了提高掘进机工作时的稳定性,提高工作效率和安全性。以悬臂式掘进机为例,分析其结构,然后对电控系统进行优化设计。
1 掘进机结构分析
以悬臂式掘进机(型号EBZ260)为例进行掘进机结构研究。悬臂式掘进机是目前采煤工作面使用最为广泛的掘进系统,它由本体机构、行动机构、切割机构、装运机构、支撑机构和电控系统组成[3],适用于各种地质条件下的巷道掘进工作,其结构示意图如图1 所示。该型号掘进机工作时的截割面可以达到31 m3,可以满足的最大巷道的宽度为6.3 m,最大的巷道高度可达5.2 m。此外,它可以对截割硬度为110 MPa 的岩层进行切割,可以满足最大的单向抗压强度为90 MPa 的岩层。其各个结构的组成和主要功能如下:
1)本体机构。主要用来承载掘进机来自切割部、行走部和运行部的荷载,也是整个掘进机的框架,由机架台和回转台组成。
2)行动机构。完成掘进机的移动,悬臂式掘进机一般选用履带式行动机构,由两条分别驱动的履带组成。

图1 EBZ260 型号掘进机结构图
3)切割结构。悬臂式掘进机的切割部分包括悬臂、切割刀具、驱动电机、运动减速箱和结构安装防护支架组成。它的工作原理是驱动电机将动力传送至截割头的减速运动箱,减速运动箱通过截割臂将动力传至切割刀具进行掘进作业。该系统中还有液压部分来配合减速运动箱控制切割刀具的移动。
4)装运机构。将掘进开采后的煤炭或物料运向运输机,完成运输任务,主要由铲板、驱动装置和测铲板组成。在装运机构的驱动装置一般选择速率低但是扭矩大的液压马达。
5)支撑机构。主要用来固定工作时的掘进机,起到稳固机器、减少岩层反作用力的作用,由重力支架组成。
6)电控系统。是掘进机中负责控制所有电气系统的设备。负责收集掘进机数据和井下地质数据,根据这些反馈结合实际情况,来完成掘进开采作业。
2 掘进机电控系统硬件的设计
悬臂式掘进机的工作环境复杂,在工作面上往往空气湿度大,并且混杂着各种煤尘和杂质,例如SO2、N0、NO2等腐蚀性气体也比较多。此外,在采掘机运行时的剧烈振动会对装置产生损伤。所以在选用硬件时要满足抗震、耐腐蚀和低故障率的装置。
2.1 控制器的设计
为了满足井下工作条件,要求电控系统的控制器要稳定、防护等级高,可以适应振动大、湿度强的井下环境,一般的PLC 不适用于上述要求。为了满足上述条件,选用Inter Control 公司的DCF-1 控制器作为处理核心[4]。该控制器的通讯接口(输入端和输出端)比较多、存储空间也比较大。悬臂式掘进机组成机构比较多,工作环境复杂,需要控制的变量和电气设备(包括电机和传感器)也很多,DCF-1 控制器丰富的通讯接口可以满足悬臂式掘进机的电气控制要求。
2.2 硬件的设计
2.2.1 电源的设计
电气机构的电源部分由控制变压器、高压熔断器、空气断路器、本安直流电源和非本安直流电源组成[5]。控制变压器选择额定容量为1.9 kVA 的变压器,要求电压的波动范围位于-20%~+15%。在电源系统中,本安电源为110 V,为控制器和其他电气设备供电的电源为24 V,5 V 为总线在隔离模块中的电压值。
2.2.2 保护单元的设计
保护单元由低压/高压漏电监测模块、电压变送器、电流变送器、耦合器和各种传感器组成。使用Pt100 温度传感器来反馈工作温度,然后通过CANopen 总线把收集到的信息传往控制器。监测漏电模块和耦合器则分布在各个结构的绝缘部,在电源启动和各个系统开始工作前进行漏电监测。此外,位于邮箱的液油传感器将监测油温和液位,然后将数据发往控制器来判定是否继续保护。
2.2.3 控制单元的设计
控制单元主要由Inter Control 公司的DCF-1 控制器组成,结合上述的电源器件和保护的单元,控制器负责信息的采集、处理和系统控制。控制单元的硬件设置主要由各个控制点、各个系统保护点、中间继电器和各个元件的输入和输出接点组成。控制器选择DCF-1,中间继电器选择CAN 光隔离中间继电器。这样不仅可以实现对CAN 信号的隔离操作,还可以放大系统中的信号,抗干扰能力强。
2.3 硬件系统的布置和安装
结合上述硬件设计,选用矿用防爆电控箱来对电控系统继续安装,其结构图如图2 所示。在电控箱的上侧为接线腔,设有接线端子。下侧为主腔,主腔底部安装保护单元、变压器和继电器。在主腔上部安装耦合器和传感器,左侧安装控制器。
3 掘进机电控系统软件设计

图2 电控箱结构图
根据上述功能和硬件介绍,首先根据如图3 的主程序流程图完成主程序软件设计。它的主要作用是在各个元件和子程序开始启动后,通过等待和命令控制,完成对各个子程序的调用。
在完成主程序的软件设计后,继续初始化子程序的设计,它主要是通过控制器对CANOpen 的设备进行管理,同时对传感器发回的数据进行分析处理,它的系统流程图如图4 所示。
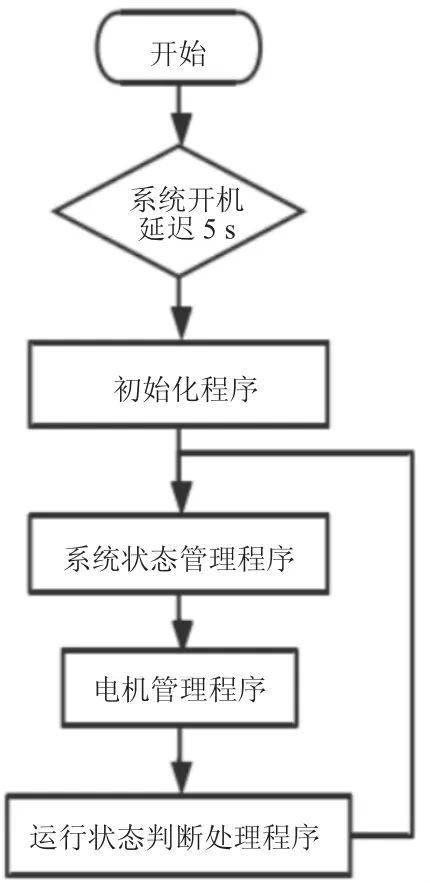
图3 主程序流程图
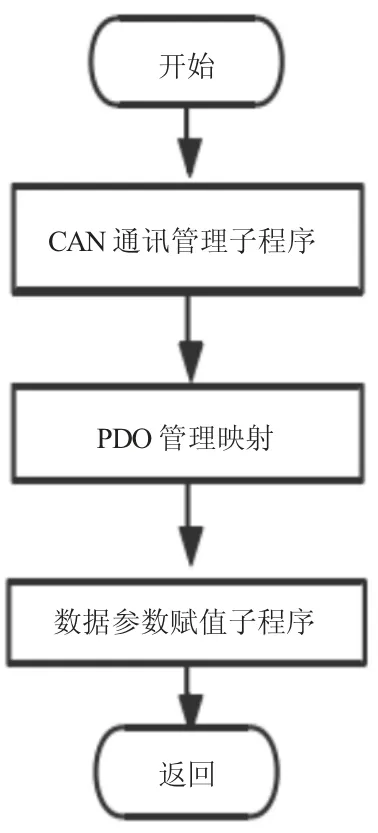
图4 初始化子程序流程图
系统状态的子程序是对控制器进行I/O 初始化,然后将内部控制和外部I/O 完成映射起到对系统各个工作部分的监测工作。包括漏电监测输入计算、系统进出电压的监测和其他传感器的监测处理等。
电机状态管理子程序是对电机工作状态进行分析处理,是针对掘进机电机的温度、电流进行的采集映射和处理。此外,也对电机油箱和工作时间进行监测统计。
运行状态子程序是掘进机运行逻辑核心,收集所处工作环境和目前的运行状态,直白地显示在操作台上,根据功能要求和相关的工作经验,提出操作意见和状态分析结果。
4 结语
根据掘进机在井下工作时的环境要求和电气设备要求,以悬臂式掘进机为例,提出了具有抗干扰能力强、耐腐蚀、效能好的掘进机结构设计,其核心是Inter Control 公司的DCF-1 控制器。此外,还包括了电源、保护单元和控制单元的设计。然后根据工作要求和硬件设施,针对掘进机电控系统的工作状况,提出了掘进机电控系统的软件设计,设计后的软件可以完成设计要求,包括对掘进机的各个工作子程序、电控系统状态的监测和管理。
猜你喜欢
凿岩机械气动工具(2016年2期)2016-11-11
汽车实用技术(2015年8期)2015-12-26
凿岩机械气动工具(2015年3期)2015-11-11
中国科技纵横(2015年2期)2015-11-05
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
科学中国人(2014年16期)2014-11-20
中国新技术新产品(2014年3期)2014-03-24
凿岩机械气动工具(2014年3期)2014-03-01
凿岩机械气动工具(2014年2期)2014-03-01