关于煤矿井下人员智能化定位系统的设计研究
2020-07-31 17:54肖震
机械管理开发 2020年6期
肖 震
(霍州煤电集团吕梁山煤电公司方山店坪煤矿, 山西 方山 033100)
引言
煤矿井下人员定位系统在确保井下人员安全方面有着非常重要的作用,尤其是在开展应急救援工作时,人员定位精度直接决定了救援的速度和效率[1-2]。人员定位系统要求覆盖整个开采区域,对所有人员进行精确定位,为了达到系统覆盖的广度要求,会用到大量的读卡器[3]。某煤矿当前阶段使用的读卡器通过RS485 总线和分站进行连接,但整体数据传输距离较远。为实现读卡器与分站之间的连接,要在煤矿井下建设长距离的通信电缆,施工难度大、成本高。且当井下人员遇到紧急情况时,需要通过手动方式启动求救信号,地面接收到求救信号后才会开展相关的应急救援工作。如果井下人员无法通过手动模式启动求救信号,地面就无法及时获知井下实际情况,很有可能会错过黄金救援时间,最终引发井下人员伤亡情况[4]。鉴于当前使用的煤矿井下人员定位系统存在的不足之处,本文充分利用UWB 超宽带定位技术以及LoRa 无线通信技术对人员定位系统进行重新设计研究,极大提升了系统的智能化水平,可有效避免人员伤亡事故的发生。
1 人员定位系统总体结构
本文设计的煤矿井下人员智能化定位系统工作原理可以概述如下:所有井下人员都配备有对应的人员标签,该标签上设置有求救按钮,通过人员标签可以向外部发出求救信号,由读卡器读取信号并根据信号来获得人员具体位置、求救信息等具体信息。在获得井下人员位置信息后,通过无线通信技术及时将信息数据传输到分站,然后由分站将数据信息进一步传输至地面集中监控中心,中心根据具体情况以及相关的应急预案立即组织应急救援工作。图1 所示为煤矿井下人员智能化定位系统工作原理框图,该系统可以显著提升井下人员定位的效果和速度。
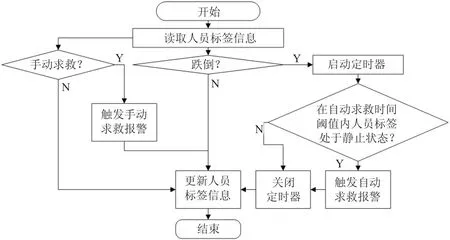
图1 煤矿井下人员智能化定位系统总体结构
2 人员定位系统主要技术
2.1 UWB 超宽带定位技术
当前RSSI、Zig-Bee、CSS 等定位技术在煤矿行业中都有一定程度的应用,但这些技术在实际应用过程中存在一些问题,其中最显著的问题是信息数据传输速度较慢且定位精度有待提升[5-6]。而UWB超宽带定位技术正好能克服上述两方面问题,即能达到及时性和精确性要求。本文通过UWB 超宽带定位技术来完成煤矿井下人员的定位,通过该技术能快速准确地计算得到读卡器与人员标签之间的间距,确保了人员定位的精确性,紧急情况下系统可自动发送报警信号。
具体而言,本文采用的是TOA 测距方法,即利用定位技术测量读卡器与人员标签之间的距离,整个定位过程需要测量2 次距离。第1 次距离测量过程:读卡器主动向人员标签发送数据信号,直到读卡器自动应答,计算这段时间差为T1,读卡器发出自动应答到人员标签接收数据信号,整体时间差为T2。第2 次距离测量过程:人员标签对输送过来的包含T1的数据信息进行自动应答,这段时间差为T3,人员标签向读卡器发送包含T3的数据信息,整体时间差为T4。信号在媒介中传输时有一定的传输速度,煤矿井下环境相对较复杂,假设数据信号在煤矿井下传输的速度为v。那么就可以通过理论方法计算得到人员标签与读卡器之间的距离d=v(T2-T1+T4-T3)/2。
2.2 LoRa 无线通信技术
传统人员定位通信系统采用的是有线通信模式,这种模式不仅施工成本高且施工难度大,在实际应用中存在一定的局限性。对于读卡器采集到的数据信息,可以通过LoRa 无线通信技术实施频谱扩宽处理,可显著提升无线通信距离,接受灵敏度也有一定程度的改善,同时可以实现数据信息的无线传输,该项技术通过SX1278 芯片来构建无线通信模块。需要指出的是,通过LoRa 无线通信技术可对数据信息进行长距离传输,但无线传输模式与有线传输模式相比较存在一定劣势,主要表现在数据传输速度相对较低。所以在本文设计的通信系统中,设立一套数据流量控制算法,对传输数据量进行压缩控制,有效规避了无线传输模式数据传输速率相对较低的问题,确保了长距离无线数据传输的可靠性。可以看出,本文在最大限度上利用了LoRa 无线通信技术的优势,并通过一定的手段有效规避了该项技术的劣势。
2.3 紧急状况处理方案
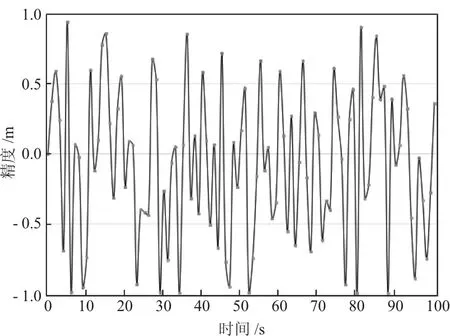
为确保煤矿井下人员的绝对安全,煤矿管理人员应该对各种潜在的风险问题制定对应的紧急处理预案。当井下人员遇到突发情况需要救援时,一方面可通过手动方式按下求救按钮,人员标签会立刻向外发出求救信号,信号通过一系列传输会在第一时间到达管理人员处,进而展开救援工作。如果井下人员遇到突发情况发生跌倒,无法通过手动方式按下人员标签中的求救按钮时,人员标签会对人员状态进行自动检测,如果发现人员出现跌倒,会立即向外发出跌倒信号,读卡器接收到跌倒信号后将数据信号传输至地面集中监控中心,并开始计时。如果超过了系统设置的时间阈值后人员仍然处于跌倒状态,系统会判定该人员处于危险状态并向外发出警报,管理人员在接收到报警信号后立即开展救援工作。本系统中准确判断人员标签状态非常重要,这是决定是否启动紧急救援的关键所在。2 个相邻采样点间人员移动距离用d表示,系统设置的定位精度用Dmax表示。当d 在完成人员定位系统的搭建工作后,对系统的有效性和可靠性开展了一系列测试实验。将10 个人员标签随机分布在一个长度为200 m 的井下巷道内,在巷道端部位置设置有读卡器以读取巷道内部人员标签信号。 为检验本文设计的智能人员定位系统工作精度,通过本系统每间隔1 s 对巷道内的10 个人员标签进行位置定位,与此同时标记10 个人员标签的实际位置,将系统检测到的位置与实际位置进行比较,可得到系统的检测误差。每次检测中统计10 个人员标签中误差的最大值。图2 所示为100 s 时间范围内系统的检测误差统计结果,从图中可以看出,本系统的定位误差没有超过1 m,这样的测量误差完全能满足工程实际应用需要。 图2 煤矿井下智能人员定位系统定位精度测量结果 无线通信技术必须在一定的距离范围内才能正常稳定工作,无线通讯距离越长,其在通讯过程中越容易出现误码情况。为测试本文设计系统的无线通信距离,将读卡器和数据集中器的初始距离设置为600 m,测试数据传输过程中的信号强度和通信误码率,然后不断扩大两个设备之间的距离,再次测试信号强度和通信误码率。测试结果发现,当两个设备之间的距离不超过1 500 m 时,通信误码率为0,可见当通信距离不超过1.5 km 时本系统具有非常高的可靠性。当两者之间的距离不超过2 km 时,通信误码率未超过3%。主要是因为本系统采用SX1278 芯片,使得在进行长距离无线数据传输时仍然具有很高的接受灵敏度。基于测试结果可以发现,本系统即便是远距离传输也能保证数据传输的可靠性和安全性。 对于手动触发求救按钮模式,经过100 次测试发现每次都能够准确将求救信号传输至地面集中监控中心。对于自动求救模式,将时间阈值设置为10 min,同样经过100 次测试,发现有96 次能够准确将求救信号传输至地面集中监控中心。可见本文设计的井下智能化人员定位系统能够克服传统定位系统中必须通过手动模式进行求救的缺陷,在很大程度上提升了井下人员的安全性。 煤矿井下人员定位系统精度对于保障人员安全有着非常重要的意义。考虑到某煤矿井下人员定位系统存在的现实问题,基于先进的UWB 超宽带定位技术和LoRa 无线通信技术对人员定位系统进行了升级改造。改造后的定位系统定位精度较高,实现了远距离无线数据传输和煤矿井下人员的自动求救,确保了人员安全。3 人员定位系统测试结果
3.1 系统定位精度测试结果
3.2 系统无线通信距离测试结果
3.3 系统紧急状况处理结果
4 结论
猜你喜欢
哈哈画报(2022年5期)2022-07-11
电脑爱好者(2020年17期)2020-09-14
学生天地(2020年1期)2020-08-25
车迷(2018年11期)2018-08-30
海峡姐妹(2018年3期)2018-05-09
电子技术与软件工程(2016年24期)2017-02-23
消费电子(2017年1期)2017-02-16
中国公共安全(2017年11期)2017-02-06
Coco薇(2015年11期)2015-11-09
数学大王·低年级(2015年6期)2015-07-09