磁轴承的遗传优化的变论域模糊PID 控制
2020-07-31 07:01孙志瑞张艳兵王慧芬
现代电子技术 2020年15期
孙志瑞,张艳兵,王慧芬
(1.中北大学 电气与控制工程学院,山西 太原 030051;2.中北大学 电子测试技术国家重点实验室,山西 太原 030051)
0 引 言
磁悬浮轴承以主动磁悬浮轴承为主,是一种对支撑部件很好的选择,如参考文献[1⁃3]描述它的优点是:可以使转子无机械接触,能够无摩擦转动,使转子的速度大幅度提升,能够达到40 000 r/min。参考文献[1]所述目前主要用在新能源领域的飞轮储能、机床等,在动力领域方面有离心压缩机、分子涡流泵等,通过对径向磁轴承、轴向磁轴承进行控制,达到其支撑的转子能够稳定悬浮并高速旋转,因此,对磁轴承控制算法的要求比较高。
当转子偏离中心位置时,磁轴承产生的电磁力也要发生相应的改变,使转子回到中心平衡位置,这就需要系统快速、准确地响应去满足此要求,因此控制器的选择很重要。目前参数、负载大幅度的非线性变化,使传统的PID 控制很难达到设计的理想初衷[1⁃2]。模糊PID控制因有一定的控制规则,导致对自我校正能力产生很大影响,在消除系统误差上表现很差,当系统趋于稳定时,易引起小范围震荡,难以得到很好的控制精度[3⁃4]。另外,变论域模糊PID 控制虽然通过对基础论域进行划分,对控制精度有一定的提高,但是规则数太多,不能快速地反映实时性。因此,本文通过利用遗传算法对控制器PID 参数值进行离线优化,将其作为在线调值的初值,再通过选用合适的伸缩因子,使基本论域随着控制需要自适应发生伸缩变化,从而提高控制的精度,降低超调,有很好的自适应能力。
1 磁悬浮轴承系统数学模型
单自由度磁悬浮轴承控制系统的结构如图1 所示。转子由左右两线圈相向配置通过励磁电流进行差动控制。位置传感器检测出转子相对于平衡位置产生的误差,将此误差送到控制器,经由事先规定的控制方法回到中心平衡位置所需的控制变量,将其送到功率放大器,经功率放大器产生足够大小的控制电流,使电磁铁产生相应的电磁力,从而使转子能够稳定悬浮。

图1 单自由度磁悬浮轴承控制系统结构图
在均匀气隙磁通,不考虑铁芯磁阻、漏磁的情况下,当转子偏离平衡位置时,经过传感器检测出转子偏离平衡位置的位移为l0,气隙分别为l+l0和l-l0,控制器通过转换电路将检测到变化,并将其转换成控制信号的形式输出,该信号被传输至功率放大器,经过一定处理生成控制电流i,i1=i0+i,i2=i0-i(i1,i2为激励电流)。
驱动电磁线圈产生电磁力之差为F=F1-F2,F1,F2的表达式分别如下:

当转子轴心有微小位移时,由牛顿第二定律得到转子的运动方程为:

用泰勒级数对式(1)在(i0,l)处展开,进行线性化后,可得:

对式(2)进行拉普拉斯变换,得到磁悬浮轴承转子的传递函数为:

2 遗传算法离线优化PID 参数初始值
针对PID 参数整定困难,常规控制器参数往往整定不良,所以选择了与一般整定PID 参数初始值有差异的方法,以遗传算法为基础的寻优对其实施离线优化。优化流程图如图2 所示。

图2 遗传优化PID 参数流程图
优化步骤具体如下:
1)遗传算法的初始步骤是以待优化参数取值范围为依据,生成相关参数组合;
2)经过仿真操作获取参数组合的系统误差,从而成功获取ITAE 指标数据;
3)将ITAE 传送至优化程序即可。
每个参数的编码长度由该参数的取值范围和搜索精度确定。本次研究选取二进制作为编码方式[5⁃7],且的取值范围依次是[0,50],[0,150],[0,10],图2中几个重要参数的设置情况如下:种群数n 设置为30,最大遗传代数Gmax设置为50,交叉概率Pc设置为0.8,变异概率Pm设置为0.001。个体适应度函数在遗传算法中起重要的作用,在个体的认可过程中作为一种评判能力,个体适应度函数形式如下[5]:

式中J 为ITAE 性能指标。
经由交叉、变异、持续搜索,最终寻找到控制器优化后的PID 初始参数值
3 变论域模糊PID 控制
3.1 变论域模糊PID 控制原理
该控制原理的核心思想在于模糊控制规则的不变性,根据误差及误差变化率的变化,引入一个伸缩因子使得初始模糊论域持续伸缩。如果误差变大,论域就会随之变大;反之,如果误差变小,论域就会随之而变小。这相当于在一个小范围内细分化了原有的控制规则,从而达到提升控制精度的目的[8⁃9]。
假设输入变量的初始论域为[-E,E],伸缩因子为α(x),通过不断伸缩改变论域的大小,得到伸缩之后的论域为[-α(x)E,α(x)E],因此,根据系统需求,通过伸缩因子不断调整初始论域,达到改变论域的目的[10]。
3.2 变论域模糊PID 控制器设计
变论域模糊PID 控制的主要内容是借助于一定条件对论域大小进行伸缩调整,从而满足多种控制器参数的范围和精度要求,根据系统需求的变化进行调控,实现系统的稳定运行。参考文献[11]采用函数形式表达论域伸缩因子,函数模型如下:

式中λ ∈(0,1),k>0。
考虑到伸缩因子选择的合适与否对控制效果有着较大的影响,因而将伸缩因子的选取作为评价变论域模糊PID 控制器功能高低的准则,从而构建基于遗传算法的变论域模糊PID 控制器,其结构框图如图3 所示。

图3 控制结构框图
图3 中模糊控制器为基于误差e 及误差变化量ec 的PID 增益调整型控制器,控制过程如下:
1)经过误差e 及误差变化量ec 根据伸缩因子函数模型得到输入变量e,ec 的伸缩因子,然后经过变论域模糊推理得到输出变量Δkp,Δki,Δkd的伸缩因子βpid。
2)通过分别调整模糊控制器的量化因子ke,kec和比例因子Lm,m=p,i,d 实现输入输出变量论域的改变。
3)在线整定参数kp,ki,kd以提升系统控制能力的精度。
3.3 系统参数及规则设定
在进行一定量的实验和调试之后,获取输入变量的两个重要指标数据,即位移偏差e 和位移偏差变化率ec,它们的论域范围是[-0.3,0.3]和[-6,6],而Δkp,Δkd,Δki这3 个输出变量的论域范围是[-3,3],[-0.6,0.6],[-3,3]。另外,根据伸缩因子的函数模型(见式(6)),取λ=0.6,k=0.5,可得到输入变量e,ec 的伸缩因子,输出变量Δkp,Δkd的伸缩因子具有与误差的单调一致性,而Δki的伸缩因子的特征与误差具有单调反向性关系,因此,其论域的伸缩因子需要实现Δkp,Δkd较大[12⁃14],而Δki较小的输出结果,所以Δkp,Δkd,Δki的伸缩因子设置状况如下所有变量的模糊论域取{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},也就是{NB,NM,NS,ZO,PS,PM,PB},它们的含义则是以零为中介点,左边代表负大、负中、负小,右边代表正小、正中、正大[15],其中隶属度函数均采用三角形函数。再者,控制系统按照Mamdani 模糊推理法合成规则,其中,变论域模糊PID 控制只是在模糊PID 控制前面增加了一个对基本论域进行伸缩的过程,实现模糊变论域的调整,模糊PID 参数调整算式为其中为经遗传算法优化的PID 三个初始值,Δkp,Δkd,Δki为模糊控制器的输出,也就是PID 的调整值。
4 系统仿真结果及分析
磁悬浮轴承对转子控制实现稳定悬浮,在Matlab 中的Simulink 搭建仿真图进行仿真分析。
仿真中各参数取值如下:磁悬浮转子的质量为150 kg,位移刚度系数δ2=2.6×106,电流刚度v=129,N=80,s=3.61×10-2m2,l0=0.03 m,量化因子ke=30,kec=0.75,比例因子Lp=0.5,Ld=0.5,Li=0.1。将参数代入式(4),得到控制系统的传递函数为
在Matlab 中的Simulink 进行仿真,仿真结果如图4所示。图中共有3 条曲线,在高峰位置最高的曲线代表的是模糊PID 控制,最低的曲线是遗传算法⁃变论域模糊PID 控制,而中间的曲线是变论域模糊PID 控制。
由图4 可知:模糊PID 控制在约0.14 s 处达到稳定,超调约为10%;变论域模糊PID 控制比前者控制有明显的提高,系统0.11 s 进入稳定,超调大约为6%;而经遗传优化的变论域模糊PID 控制系统约在0.02 s 处达到稳定,可以快速地调节使轴承转子回到稳定平衡位置,更能满足系统的响应需求。因此所设计的经遗传优化的变论域模糊PID 控制更好地改善了控制性能。
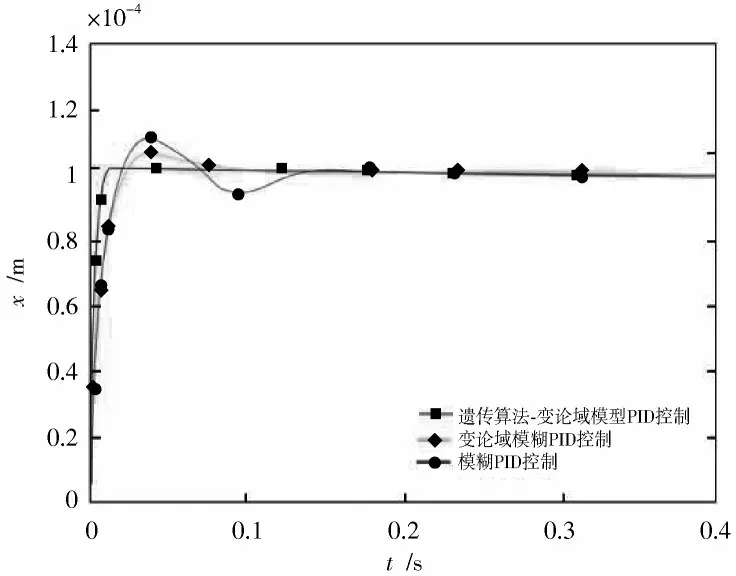
图4 主动磁悬浮轴承位移响应曲线
系统在0.18 s 处突然加一个扰动,改变负载时,通过仿真图5 可以看出,本文提出的控制算法对磁悬浮轴承的控制具有较强的自适应能力,系统响应速度快,约用时0.03 s 恢复到稳定。

图5 系统在0.18 s 处加扰动仿真图
5 结 论
磁悬浮轴承的转子在高速运转状态下,其系统具有很强的非线性,因此对控制器的要求很高。本文根据主动磁悬浮轴承的特性分析,结合变论域模糊控制、PID控制的特点,设计了经遗传优化的变论域模糊PID 控制器,使得系统有很好的动静态特性,提高了系统的响应速度,稳定性达到了要求,满足实验特性,具有很强的适应性。
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
成都信息工程大学学报(2021年6期)2021-02-12
测控技术(2018年10期)2018-11-25
石油地球物理勘探(2017年2期)2017-11-23
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
广东石油化工学院学报(2016年3期)2016-05-17