
远程遥控船舶发展研究
2020-07-30 01:59中国船级社科创试验中心蔡玉良
中国船检 2020年7期
中国船级社科创试验中心 孙 旭 蔡玉良

随着自主船舶技术的高速发展,航运界逐渐对自主船舶的发展路径有了较为清晰的认识。国际海事组织(IMO)基于法规梳理的目的,把自主船舶分为四种类型,即具有辅助决策系统船舶、有人在船的遥控船舶、无人在船的遥控船舶和完全自主船舶。这种划分方式除了便于法规梳理,也从技术实现角度规划了智能船舶的发展路径。现阶段,我国自主船舶在船舶辅助决策功能上进行了有益的探索,一些科研成果已经得到了工程化应用。由于人工智能技术在船舶领域的发展较为缓慢,技术成熟度较低,导致船舶辅助决策系统只能在某些特定条件下降低人员劳动强度和提高安全等级,也不能达到减少配员的目的。因此,自主船舶的研究重点逐步聚焦于更具商业价值的远程遥控船舶和完全自主化船舶。
自主决策是船舶自主化的核心技术之一,需要在辅助决策功能的基础上进一步研究开发。在现有条件下,自主决策同样面临人工智能在船舶领域应用的技术瓶颈问题。而远程遥控船舶的核心理念是把船舶操控从船端转移到岸端,并未改变决策主体是人的本质,从而不需要解决人工智能技术应用的问题。因此,远程遥控船舶更加易于实现。本文将从公约规范和技术实现的角度出发,对远程遥控船舶的技术发展进行分析。
公约规范
现有的船舶公约规范主要是围绕有人在船、人员决策及船端操控而制定,远程遥控船舶公约规范需要按照国际海事组织对于远程遥控船舶分类进行分别研究。有人在船的远程操控船舶是在传统船舶的基础上增加远程遥控功能,这种技术演进模式在船舶技术发展的过程中是有类似案例的,如自动操舵仪。操舵系统在最初阶段为驾驶员全程手动操舵,随着自动化技术的进步,自动操舵功能成为了现实,部分船舶开始首先使用自动操舵技术,随后制定了自动操舵的公约规范。在这个过程中,手动操舵和自动操舵公约规范制定所遵循的原则并不是等效替代,而是功能增加,即在手动操舵功能的基础上,增加自动操舵功能,最为可靠的手动操舵功能并未取消,以满足人员决策的原则。在船舶操控责任和权限划归为船端的前提下,保留船端操控系统可以满足船端操控的原则,有人在船的远程遥控功能也可以视为功能增加,现有的公约规范不会显著限制其技术的发展及应用,公约规范制定的主要工作是增加远程遥控的技术要求,而非修订现有公约规范。无人在船的远程遥控将取消船端的操控设施及配员,这种技术形式与现有的公约规范将产生极大的冲突,无法满足一系列针对人员在船和船端操控的公约规范要求,如驾驶台布置、报警及显示、人机工程等,现有的公约规范将限制其技术的发展及应用,公约规范制定的主要工作将基于远程遥控等效替代船端操控的思路进行修订,对现有公约规范体系将产生颠覆性影响,无人在船的远程遥控公约规范的制定道路必将曲折而漫长。
技术实现
典型远程遥控系统包括态势感知、集成控制、船岸通信及岸基控制等子系统,如图1所示。
态势感知子系统负责采集海洋气象、障碍物、航道标识等航行环境信息和设备报警、工作模式、视情维护等设备信息,并进行数据融合。集成控制子系统负责把岸基控制指令分发到驾驶台和机舱设备进行控制,同时采集驾驶台和机舱设备的执行控制指令后的反馈信息,形成控制闭环。船岸通信子系统负责把态势感知数据、控制反馈等信息进行汇聚、压缩、提取后通过移动网络或卫星通信发送到岸基控制子系统,同时把岸基控制子系统的控制指令发送到集成控制子系统。船岸通信子系统既是船端和岸端通信的桥梁,也是通信数据汇聚中心。对于有人在船远程遥控船舶,除了数据通信功能,还应具备船岸数据共享功能,使驾驶台人员和岸基人员可以及时有效的获取船舶控制、报警、反馈、状态等信息,避免由于信息不对称导致的安全隐患。船岸通信是船舶远程遥控系统的核心功能,需要着重解决通信可靠性的问题。对于内河及沿海等可以使用移动通信网络的船舶,通信可靠性可以通过不同通信运营商及专用网络组合的冗余设计进行解决;对于使用海事卫星通信的远洋船舶,海事卫星通信带宽窄、时延大及稳定性差等缺陷是实现远洋船舶遥控的技术瓶颈,在现有技术条件下远洋船舶远程遥控通信还没有完善的解决方案。岸端控制子系统负责态势感知数据的重构、显示和发送控制指令,接收控制反馈。岸基控制子系统的核心功能为数据重构,通过使用数字孪生、虚拟现实等技术,对船端感知数据进行解构、还原、建模等处理,以三维的模式进行显示。
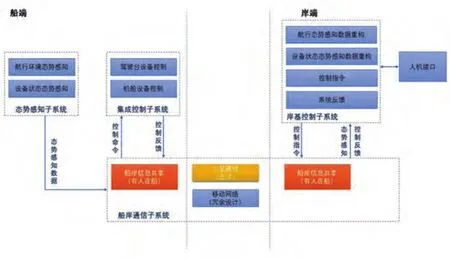
图1 典型船舶远程遥控系统

图2
通过对典型远程遥控系统的分析,远程遥控系统的大部分技术是属于现有成熟技术,在态势感知、决策控制、视情维护等方面由于依靠岸基操控人员进行分析决策,规避了使用人工智能技术,从技术角度来看,比辅助决策系统和完全自主系统更加容易实现。有人在船的远程遥控系统和无人在船的远程遥控系统在技术实现上基本相同,主要区别在于是否需要进行船端信息共享设计。不同航区船舶通信的可靠性是远程遥控系统需要解决的核心问题。除了通信可靠性,目标识别、设备状态传感、多源数据融合、态势感知数据重构、数字孪生建模、人机工程等远程遥控关键技术已经有所突破,在不远的未来将会进行工程化应用。远程遥控船舶具备降低劳动强度和减少船舶配员的商业价值,现有公约规范不会对有人在船远程遥控船舶的发展产生明显制约,内河及沿海船舶的远程遥控在技术上更加易于实现。因此,内河及沿海有人在船远程遥控船舶很有可能成为最先实现工程化应用的自主船舶。
现阶段,远程遥控船舶实船试航的模式为在符合现有公约规范的船舶上加装远程遥控系统,类似于有人在船的远程遥控船舶,这种试航模式从公约规范的角度来看似乎并未产生明显的冲突。但是在实际应用中,远程遥控船舶技术尚未成熟,在试航过程中存在明显的安全隐患,安全试航已经成为国际海事组织、海事主管当局、船级社及船东关注的焦点,是制约自主船舶发展的主要因素。为此,国际海事组织颁布了自主船舶试航技术法规,为海事主管当局和船检机构对于自主船舶试航的管理和安全评估提供了依据,以风险评估的方式暂时性弥补了自主船舶公约规范的空白,在促进自主船舶技术发展的同时,保障自主船舶试航的安全。在自主船舶技术成熟及相关规范标准完善之前,这种管理和评估的模式将长期存在。
猜你喜欢
作文周刊·小学二年级版(2022年12期)2022-03-19
小学生优秀作文(低年级)(2021年11期)2021-12-06
语文世界(小学版)(2019年2期)2019-02-24
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
中国集体经济(2017年1期)2017-01-04
农民科技培训(2016年10期)2016-11-15
电脑知识与技术(2016年3期)2016-04-07
小天使·一年级语数英综合(2014年7期)2014-06-26
环球时报(2012-03-28)2012-03-28
