
基于滑移网格方法的水陆两栖飞机单船身耐波性数值模拟
2020-07-30 09:35李新颖吴彬蒋荣
船海工程 2020年3期
李新颖,吴彬,蒋荣
(中国特种飞行器研究所,湖北 荆门 448035)
水陆两栖飞机是指能在水面上滑行、起飞、降落和停泊的飞行器,同时也具备在陆地上起降的能力[1]。水陆两栖飞机水面高速滑行属于强非线性气水两相流问题,尤其在波浪中高速滑行时,存在水面大幅起伏、喷溅[2]、船体压力梯度变化大、断阶处流动分离、鸡尾流、开尔文流场等现象。目前,对这种水陆两栖飞机强非线性问题进行分析时,主要以数值模拟和水池试验为主。数值模拟时,飞机的多自由度大幅运动通常采用动网格方法[3]、重叠网格方法[4]、滑移网格方法、网格自适应方法等进行模拟。轻型水陆两栖飞机因重量轻、前体斜升角小、后体尖细等特点,导致其在水面高速滑行过程中的俯仰(15°~20°)和垂荡运动响应较大,采用传统动网格技术对其耐波性能进行数值模拟时,往往会因为网格的过度拉伸和变形而导致模拟误差较大甚至发散。
本文采用滑移网格方法结合传统动网格方法对水陆两栖飞机单船身波浪中航行时的耐波性能进行数值模拟,旨在解决传统动网格方法在水陆两栖飞机水面大幅运动数值模拟过程中的网格严重拉伸和变形问题。通过数值模拟,得到其在规则波中大幅运动时的受力和运动响应,通过试验验证数值模拟方法。
1 计算模型
本文以某轻型水陆两栖飞机为例,该飞机为单船身、悬臂式中上单翼布局形式,发动机高置在机身背上[5],见图1。
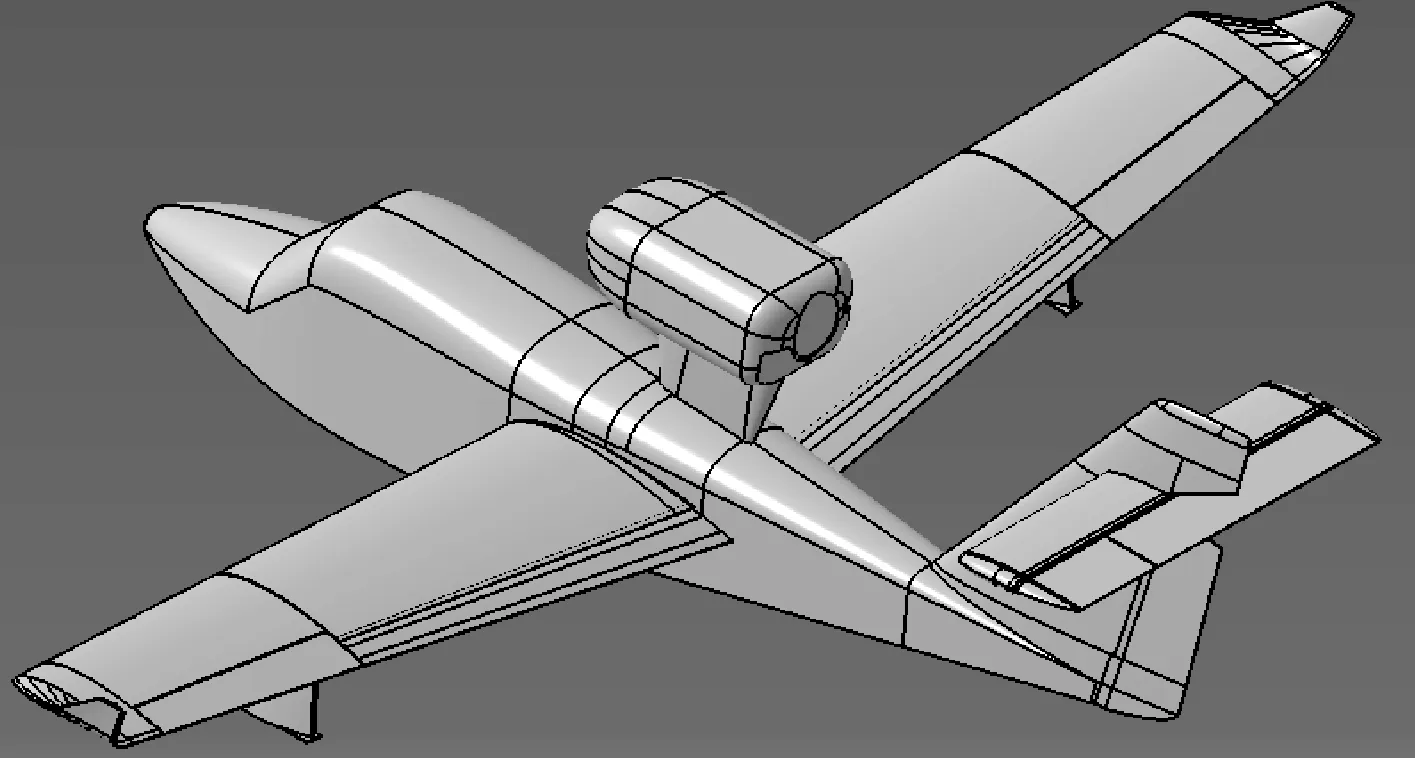
图1 轻型水陆两栖飞机
对飞机的耐波性能进行分析时,将飞机简化,去掉气动部分(见图2),并通过在重心位置施加一垂向外力来模拟机翼的气动升力,外力大小如下。

图2 轻型水陆两栖飞机单船身
W0=W(V/Vt)2
(1)
式中:W0为外力;W为飞机排水量;V为飞机航速;Vt为飞机离水速度。
对水陆两栖飞机单船身在弗劳德数(Fr)为1.405、波高/飞机长(h/L)为0.018、一系列不同波长下的耐波性能进行分析,单船身具有航向、俯仰和垂荡三个自由度,工况见表1。

表1 工况列表
2 数值模拟
2.1 计算方法
2.1.1 控制方程
任何CFD均基于流体力学基本控制方程:连续方程、动量方程与能量方程[6]。水陆两栖飞机单船身波浪水面滑行属于等温条件下的不可压缩多相流流动,其基本控制方程组如下。
连续方程:
(2)
动量方程:
(3)
式中:ρ为密度;t为时间;▽为散度;u、v、w分别为x、y、z方向上的速度分量;p为静压;τ为切应力;f为单位质量的体积力。
微分方程离散采用有限体积法,离散求解方法为SIMPLE算法,湍流模型为k-ω(SST Menter),自由面捕捉采用VOF方法。
2.1.2 滑移网格方法
滑移网格方法主要用于解决存在旋转或相对运动的数值模拟,计算域分旋转区和滑移区。与常规动网格方法不同,滑移区中的网格做刚性运动,两区之间通过差值进行流场计算,且物理量在交界面上连续[7],见图3。

图3 滑移网格方法
2.1.3 二阶Stokes波浪模型
选用二阶Stokes波浪模型生成规则波[8]。
速度势函数:
(4)
波面方程:
cos[2(kx-ωt+α0)]
(5)
式中:a为波幅;k为波数;ω为波浪圆频率;α0为最大波倾角;d为水深。
2.1.4 数值造波与消波方法
采用边界造波法和阻尼消波法进行数值造波与消波[9]。以表1中λ/L=2.034的规则波为例进行数值造波与消波验证,计算域沿波浪传播方向为5λ,出口处有1λ消波区,水面距上边界和下边界、以及侧向计算域均为1λ,见图4。

图4 数值造波与消波示意
网格划分时,对1.5倍的波高范围内的网格进行加密,网格尺寸为X=Y=λ/60、Z=h/20,消波区网格适当粗化。计算时,沿波浪传播方向每隔1λ距离布置一个监测点,监测波浪的运动情况,时间步长为T/200(T为波浪周期)。数值造波与消波的网格和结果见图5~7。

图5 数值造波与消波网格
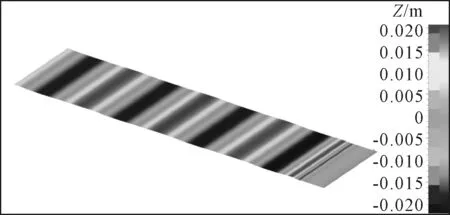
图6 数值造波与消波流场
由图7可见,工作区的波浪品质良好,且沿波浪传播方向几乎没有衰减,与理论波形对比,误差小于5%,另外出口边界处的水面接近于平静水面,说明消波效果良好。

图7 波高曲线
2.2 计算结果
对水陆两栖飞机进行网格划分时,计算域沿波浪传播方向为2L+3λ(模型首部离入口2L,出口处有1λ消波区),水面距上边界和下边界、以及侧向计算域均为2L,滑移区为圆柱形,半径1.3L、厚度1.8B(B为模型半宽),见图8。
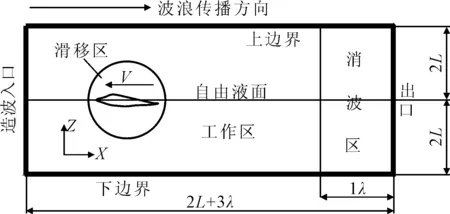
图8 计算域示意
网格划分时,沿航向模型表面布置500个网格,断阶和尾部网格进一步细化,对2倍波高范围和尾部1L流场区进行网格加密,用于捕捉波浪和尾部“鸡尾流”,网格尺寸为X=Y≤λ/60、Z=h/20,消波区网格适当粗化;另外由于滑移区存在旋转运动,为了保证滑移区旋转过程中的水面处有足够精细的网格,在滑移区增加两个扇形加密区(以模型重心为圆点,前后各一个),考虑到水陆两栖飞机水面滑行过程中的俯仰不会超过20°(抬头为正),故取扇形加密区的角度为25°,网格尺寸为X=Y≤λ/60、Z=h/20。边界层Y+取40,延展比取1.2。网格见图9。

图9 数值模拟网格
数值模拟时,模型的俯仰运动采用滑移网格方法模拟,垂荡运动采用传统动网格方法模拟,模型由静浮状态经过3 s加速至指定航速,入口处持续生成规则波浪,计算时间步长取0.005L/V。
最终通过数值模拟得到了水陆两栖飞机单船身在规则波中航行时的阻力平均值R、俯仰双幅值θ、垂荡双幅值hm、重心垂向过载双幅值am和流场示意图,见表2、图10、11。
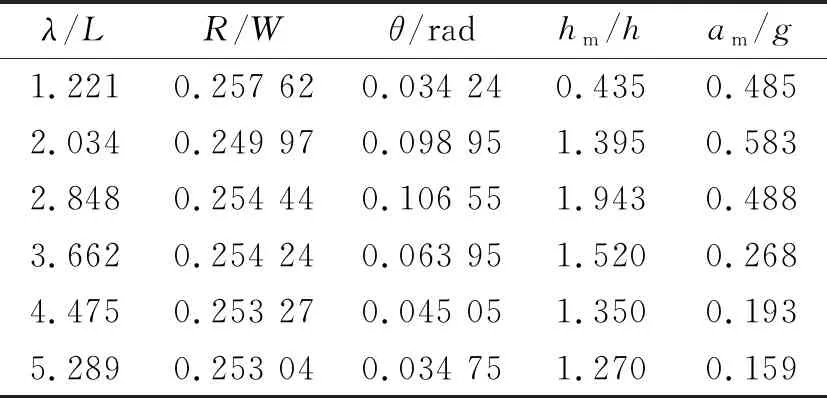
表2 数值模拟结果

图10 数值模拟云图

图11 压力云图和Z向位置(λ/L=5.289)
由图10、11可得,水陆两栖飞机单船身在规则波浪水面滑行时:
1)单船身的俯仰运动响应较大,尾部有明显的鸡尾流和开尔文尾流场。
2)滑移交界面区域的流场基本连续,断阶处的水流与前体分离,形成空穴,经过一定距离后再与后体接触。
3)单船身前体处有明显驻点线(喷溅区)、后体也有明显压力突变线,由驻点线到断阶、后体压力突变线到尾部,压力均逐渐减小。
3 水池试验
3.1 试验方法
开展水陆两栖飞机单船身模型的制作和水池耐波性拖曳试验,按Fr相似准则进行,满足几何相似和运动相似[10]。
水陆两栖飞机单船身模型采用东北红松、并经过表面光顺和喷漆处理而成,将模型调整到指定的重量、重心和惯量后,安装到高速拖车的适航仪上。试验时,测量单船身模型在规则波中航行时的阻力、俯仰、垂荡和过载随时间的历程。试验示意图见图12。

图12 水池试验示意
通过水池试验观测可得,试验时模型周围的流场特征(喷溅、鸡尾流和开尔文流场)与数值模拟的流场特征基本吻合。
3.2 试验结果
对采集的试验曲线进行滤波处理,按遭遇频率进行滤波,通过分析得出水陆两栖飞机单船身在规则波浪水面航行过程中的阻力平均值R、俯仰双幅值θ、垂荡双幅值hm、重心垂向过载双幅值am,见表3。

表3 水池试验结果
4 结果对比分析
对比数值模拟与水池试验的阻力平均值R、俯仰双幅值θ、垂荡双幅值hm、重心垂向过载双幅值am,见图13~16。

图13 阻力平均值对比曲线

图14 俯仰双幅值对比曲线

图15 垂荡双幅值对比曲线

图16 重心垂向过载双幅值对比曲线
通过分析可得,两者随波长的变化趋势基本相同,俯仰双幅值、垂荡双幅值和重心垂向过载双幅值具有明显峰值点,且阻力平均值、俯仰双幅值、垂荡双幅值和重心垂向过载双幅值误差均在10%以内,见表4。

表4 数值模拟与水池试验误差
5 结论
1)水陆两栖飞机单船身在规则波水面滑行时,前后船体有明显驻点线,断阶处存在空穴,尾部有明显的鸡尾流和开尔文尾流场。
2)采用滑移网格方法结合传统动网格方法能较好地模拟水陆两栖飞机在规则波水面滑行过程中的大幅运动,数值模拟结果与水池试验结果对比,误差均在10%以内,验证了方法的可行性。
3)基于滑移网格方法的单船身耐波性数值模拟为轻型水陆两栖飞机耐波性的分析奠定了基础,后续可开展轻型水陆两栖飞机全机的耐波性分析。
猜你喜欢
——中国水陆画艺术精品展
中华书画家(2022年5期)2022-07-20
学苑创造·A版(2022年4期)2022-06-18
科学与财富(2021年36期)2021-05-10
小学阅读指南·高年级版(2020年3期)2020-04-01
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
现代企业(2015年6期)2015-02-28
学苑创造·A版(2009年6期)2009-12-07
早期教育(家庭教育)(2009年5期)2009-05-27
