
32位微控制器在远程网络化测控系统研究
2020-07-29 08:55李想李阳
微型电脑应用 2020年7期
关键词:实现路径
李想 李阳


摘 要: 对嵌入式技术在远程测控系统中的应用进行了研究,提出了一种远程网络化测控系统的设计方案,并完成了远程测控系统嵌入式网关的设计。系统基于HTTP协议嵌入式网络,系统选用ARM中的S3C44B0X芯片作为硬件平台的核心处理器,嵌入式网关基于32位微处理器使其性能得以有效提高,对嵌入式网关软硬件的设计与实现过程进行了详细阐述。
关键词: 远程测控系统; 嵌入式网关; CAN通信; 实现路径
中图分类号: TP 274文献标志码: A
Research on 32-bit Microcontroller in Remote
Networked Measurement and Control System
LI Xiang1, LI Yang2
(1. Department of Electronic Engineering, Shanxi Institute of Technology, Xian, Shanxi 710302, China;
2. Xian Botanical Garden of Shanxi Province, Institute of Botany of Shanxi Province, Xian, Shanxi 710061, China)
Abstract: This paper studies the application of embedded technology in remote measurement and control system, proposes a design scheme of remote networked measurement and control system, and completes the design of embedded gateway for remote measurement and control system. The system is based on HTTP protocol embedded network. The system selects the S3C44B0X chip in ARM as the core processor of the hardware platform. The embedded gateway is based on the 32-bit microprocessor to improve its performance. The design and implementation process of the embedded gateway hardware and software are elaborated.
Key words: remote measurement and control system; embedded gateway; CAN communication; implementation path
0 引言
目前在工業自动化领域中远程测控系统已经成为一项研究重点,已有的远程测控系统大多是以具体应用需求为依据采取专门的设计与开发方式,导致系统间的通用及共享程度降低,但这些系统的功能结构在实际应用上有一定的关联性,日常生产生活对远程测控系统的需求不断提高,广泛应用的网络计算机和嵌入式等技术为远程测控系统的实现提供了技术支撑,目前针对设备状态的远程监控,低端微处理器已难以满足现代化系统的功能需求。为实现硬件可扩展及软件可定制功能,同时有效避免系统重新开发时的大量重复工作,针对远程测控系统本文完成了测控系统设计方案的构建,该系统基于嵌入式技术,显著提升了系统的开发效率及可重用性,有效融合了嵌入式技术及网络技术的嵌入式网关使远程采集现场设备数据功能得以有效实现,在降低系统开发及使用成本的同时提高了测控效率。
1 需求分析
快速发展完善的网络计算机、微电子及嵌入式等现代技术为远程测控系统功能的实现与不断优化提供了强大的技术支撑,远程测控功能在日常生产生活中应用范围不断扩大,对测控系统及远程测控技术的需求不断提高,尤其是在测控范围不断扩大的工业控制领域中所需测控的对象数量及复杂程度不断提升,不同设备的监测与控制对测控技术性能的要求日益提高(包括可靠性、安全性、经济性、便捷性等)。针对远端的设备是通过使用专用通信线路的本地计算机实现对设备状态的远程测控过程(包括查询、监测与控制),采用远程测控监视现场工作情况时无需工作人员亲临现场(尤其是恶劣的环境)即可完成获取相关信息、故障提醒与恢复、设置参数等功能。作为一种远程测控系统,嵌入式测控系统除了适用于特殊地方的测控(条件恶劣、不利于工作人员长期停留,如水电力/电站监控、矿山监控等)外,还可应用在楼宇自动化、智能家电、火车调度等场合,弥补了传统测控领域内存在的不足[1]。为有效弥补现有测控系统普遍在通信方式及通信联网功能方面的不足,对网络化远程测控系统(基于 Internet)研究的重视程度不断提高,本文在现有研究基础上采用高性能32位微处理器完成了一种基于嵌入式网关远程测控系统的构建,实现了系统对远程大范围内复杂环境及条件的测控功能。
2 嵌入式网关硬件设计
嵌入式网关设备具备体积小、低功耗、安全可靠等优势,除实现路由功能外,能够使不同的分离、异构网络(包含两个或多个)通过嵌入式装置的使用实现互联互通以及通信协议的转换,TCP/IP 数据包通过此网关可完成到串行数据的转换,在工业自动化系统中通过有效连接以太网和现场总线实现其设备的网络化。为此本文对嵌入式网关进行了优化设计,主要针对远程各智能控制单元(工业现场)负责管理其所采集的设备数据信息(包括接收、储存、处理等),实现通信协议从TCP/IP到CAN间的转换,并以所获取数据信息为依据完成网页的制作,从而实现通过联网的浏览器查询和处理设备信息。
2.1 硬件总体架构设计
本文所设计的嵌入式网关硬件采用模块化设计思路,主要由三个模块构成,即主控制器、CAN和以太网的通信接口,嵌入式网关总体架构如图1所示。
具体选用了集成ARM7TDMI核的微控制器S3C44B0X(韩国三星公司,具有较高性能以及性价比的优势)作为主控制器,由SDRAM和Flash芯片(容量均为8 M)共同构成其外围存储电路,较适用于嵌入式设备,主要负责实现通信协议的转换(从以太网到CAN)和控制,S3C44B0X芯片工作频率可达66 MHz,此外许多系统所需的外围功能模块也集成于该芯片内[2]。嵌入式操作系统通过Flash存储器对其内核及应用程序进行存储,在系统刚启动时,程序通过S3C44B0X完成从Flash到SDRAM存储器的输入后开始运行,用户通过网络实现远程监控现场设备。
2.2 以太网通信的实现
通过设计的接口电路实现以太网通信通过程,接口采用高集成度具有8/16位总线模式的RTL8019AS作为以太网控制器(Realtek公司,一种以太网通信控制芯片)、采用20F001N作为滤波器件,此外还包括8针模块插口的RJ45,滤波器同以太网控制器的输出端口相连实现通信信号的滤波与变换,滤波器和以太网通过双绞线(带RJ45插口)相连,RTL8019AS集成有通信协议IEEE802.3中的部分通信功能(包括介质访问的物理层和控制子层),简单的包括数据帧接收和发送在内的数据包管理工作通过其内置的FIFO单元和两个DMA通道(本地和远程)即可实现[3]。本文网关选用了跳线模式作为以太网控制器同主机间的接口模式。为防止RTL8019AS对其它数字芯片产生干扰采用了模拟地的接地方式。
2.3 CAN通信的实现
通过由光耦器件6N137、CAN控制器(采用了增加PeilCAN 模式的SJA1000 芯片,Philips公司)、CAN收发器(负责连接数据传输线路和CAN控制器)构成的硬件电路实现CAN通信,该具有多种新特性的独立的 CAN 控制器支持CAN2.0B协议,从而使数据收发效率得以有效提高。SJA1000通过S3C44B0X的控制功能完成数据的收发。为确保CAN收发器的高数据传输效率本文选用了PCA82C250芯片,通过该芯片的RS脚完成对包括待机、高速、斜率控制在内的工作模式的设置,本文网关主要使用了斜率控制模式[3]。电气隔离通过在SJA1000和PCA82C250间安置光耦器件实现,进而使网关的抗干扰性能得以显著提升。
3 网关软件的设计与实现
3.1 嵌入式Web服务器的实现
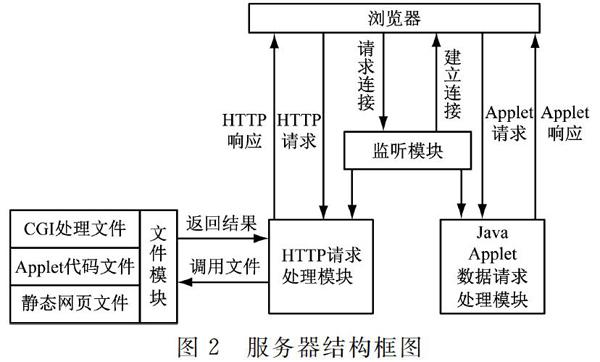
该部分同样基于嵌入式系统实现,将Web服务器内嵌于设备中,为高效实现系统的底层通信功能(基于TCP/IP协议),在现场测控设备中通过相应软硬件平台引入服务器。Web服务器通过标准通信协议及接口的使用实现统一操作及控制界面(基于浏览器)的提供,使用者只要通过网络合法接入系统即可获取其所提供的测控相关信息。本文系统网关采用嵌入式linux作为操作系統,在此基础上通过S3C44B0X(32位)平台使用相关技术(包括公共网关接口、Java Applet等)完成嵌入式Web服务器系统的构建,如图2所示。
服务结构框图负责对端口任务进行监听的监听模块将客户浏览器同测控系统间通过TCP三次握手过程的使用实现有效连接的建立。监听模块在检测到浏览器发送的通信连接请求后先通过端口号对其类型(HTTP请求或Java Applet)进行判断,在此基础上对相应请求处理模块进行调用完成处理进程。在客户端向获取设备状态信息时需调用请求处理模块(针对Java Applet数据),系统据此向客户端发送现场采集的设备状态数据(按预先设定的频率)并在浏览器上动态显示;在客户端将控制命令传送至现场设备时需调用HTTP请求处理的模块,系统据此调用相应文件模块,再向客户端返回处理结果(根据HTTP协议)[4]。采用linux文件系统实现文件模块(可通过静态网页生成文件,或由公共网关接口、Java Applet代码对文件进行处理),并从HTTP消息中对用户设置的控制参数进行解析和正确处理,用户身份的安全认证功能由公共网关接口处理完成。
3.2 以太网通信软件的设计和实现
驱动RTL8019AS 芯片的软件子程序包括:(1) 子程序的初始化,主要负责初始化设置芯片内的相关寄存器参数(包括RCR、DCR、CURR、TCR等),以确保芯片启动、存储、复位等操作的顺利完成。(2) 寄存器设置,主要包括物理地址、数据总线宽度、接收数据包类型及收发缓冲区大小、缓存门限(先入先出)、中断服务种类等。(3) 数据的发送驱动及接收子程序,负责包括远程和本地DMA的分别启动(通过微控制器),RTL8019AS缓存接收到数据后向以太网传输线发送,数据发送子程序的步骤为:首先将所需发送的数据封装(以802.3以太网协议为依据)为太网帧,再将数据帧向RTL8019AS发送,据此对发送控制的寄存器进行设置(包括发送缓存区的起始页地址、发送数据包长度),最后通过RTL8019AS向网络上传输该帧信息;数据接收子程序则通发送过程相反[5]。
设计嵌入式网关通信时,基于流行的TCP/IP协议栈组网形式,数据在网关的应用程序和以太网间进行传输时需先处理相应TCP/IP协议,考虑到嵌入式网关受到存储容量及处理速度的限制,对共有四层结构的TCP/IP协议体系为高效实现以太网通信过程需以特定功能需求为依据进行合理裁剪和优化,TCP/IP的协议族主要包括TCP、IP)、ARP、SNMP、UDP、HTTP、FTP及ICMP等,根据实际需要本文完成以太网通信的网关的TCP/IP协议栈主要由HTTP协议、TCP、IP、ARP、ICMP构成,基于此的数据包处理流程[6],如图3所示。
CAN通信功能主要通过CAN2.0B通信协议的使用实现,本网关传输数据时采用包含11位标识符的标准帧,前四位对应信息帧号、中间四位对应下位机设备编码、最后四位表示数据类型编码(对应上位机命令),启动系统时进入复位模式,并初始化处理CAN控制器(包括对工作方式、波特率参数、接收代码/接收屏蔽/中断允许寄存器、接收滤波方式等进行设置),然后进入操作模式实现正常通信过程[7]。通信的协议转换由嵌入式网关执行,微控制器接收到以太网的命令先完成数据解包(通过TCP/IP协议栈)后再进行数据封装(通过CAN协议),接下来写入SJA1000并向现场智能控制单元传送。智能控制单元相关数据及参数值的上传同此过程相反。
4 实验测试
为检测本文所设计嵌入式网关的性能,通过基于此网关的远程测控平台,如图4所示。
其结构框图的构建检测远程监控工业现场设备的实现情况,嵌入式网关在接收到现场控制单元传送的设备参数后完成初步处理及通信协议的转换,再向以太网上传[8]。该测试平台的相关数据检测结果如表1所示。
测试过程中系统能够稳定运行,对比表中的设备原有的现场检测结果可知本文测控平台同原有参数检测结果的相对误差均不超过2%,证明该嵌入式网关具备较佳的测控性能,在不受工业现场环境及条件限制的情况下通过该远程测控系统实现设备的远程监控过程,为确保生产过程的顺利进行提供支撑,具有较高的实际应用价值。
5 总结
本文以构建基于HTTP协议和嵌入式网关的远程网络化测控系统作为主要设计目标,在对功能和性能需求进行分析后,并详细阐述了具体的设计过程,结合运用网络技术和嵌入式技术完成了系统总体方案的设计,系统软硬件平台的设计以模块化思想为依据,通过对低性能嵌入式网关(基于低位数微控制器)进行优化完成了嵌入式网关软硬件的设计过程,针对现场设备状态及工作状况采用浏览器即可完成监控过程。利用实验测试系统功能,结果表明本文所设计的测控系统平台设备远程访问、监测与控制功能得以有效实现。
参考文献
[1] 马卫东,王志颖. 基于FSM的现场控制系统通用架构及远程控制协议设计[J]. 计算机测量与控制, 2016(5):1226-1229.
[2] 张晋涛,郭捷,张希建,等. 基于工業组态软件Cimplicity的海水淡化监控系统设计[J]. 工业控制计算机, 2016(3):4-5.
[3] 党琦,苟茹君,董广然,等. 多目标控制系统中TCP粘包问题的解决方法[J]. 电讯技术, 2017(9):1082-1087.
[4] Ali Parsa, Alireza Farhadi. Measurement and control of nonlinear dynamic systems over the internet(IoT): Applications in remote control of autonomous vehicles[J].Automatica,2018(5):93-103.
[5] Nonthamon Chaikham, Wannika Sawangtong. Optimal control of Zika virus infection by vector elimination, vector-to-human and human-to-human contact reduction[J]. Advances in Difference Equations, 2017(1):1-12.
[6] 张京开,王新,张少宏,等.基于Web的日光温室地暖远程测控系统设计[J]. 农业工程, 2018(S2):28-32.
[7] 邓轻松. 基于B/S架构的嵌入式WEB测控系统的设计与实现[J]. 电子世界, 2017(20):182-184.
[8] 徐晓峰,王存款,王斌,等.基于物联网涂装RTO设备的远程测控系统设计[J].现代涂料与涂装, 2018(6):38-41.
(收稿日期: 2020.01.03)
作者简介:
李想(1981-),男,本科,专职教师,研究方向:微控制器技术与应用、无人机探测。
李阳(1982-),女,博士,副研究员,研究方向:信息技术在恢复生态学中的应用研究。
猜你喜欢
当代经济管理(2016年12期)2017-01-10
湖北函授大学学报(2016年10期)2016-12-30
商情(2016年43期)2016-12-26
商业经济(2016年3期)2016-12-23
今传媒(2016年11期)2016-12-19
西部学刊(2016年19期)2016-12-19
现代经济信息(2016年27期)2016-12-16
企业导报(2016年19期)2016-11-05
人间(2016年26期)2016-11-03
出版广角(2016年4期)2016-04-20
