
冶炼隧道窑顶车机控制系统的设计
2020-07-29 05:04:04赵刚
中国设备工程 2020年15期
赵刚
(阜新市先进制造业发展服务中心,辽宁 阜新 123000)
顶车机是隧道窑生产线上的重要设备。主要功能是运载反应釜进出窑炉。顶车机的运行速度,可以改变反应釜在窑内的停留时间,可以使反应釜内物料在窑内具有最佳反应温度和反应时间。合理的顶车速度是冶炼产品质量的关键,也使窑内热能得到充分利用,可以提高生产线的效率。传统顶车机要是通过一套液压系统推动窑车向前运动。液压系统包括液压泵、直流电机、电磁阀、管路、配电箱等。需要定期维护,更换液压油和过滤器等配件,容易出现漏油现象。另外当液压系统由于管路爆裂失压,无法通过手动方式驱动轴向动作。液压系统需要控制阀门开关大小来控制窑车运行速度,控制复杂,精度不高。
1 系统的主要创新点
本成果的主要创新点是把电动缸与PLC控制相结合应用在顶车机中,通过PLC和驱动伺服电机达到对电动缸的精准控制。目前,电动缸技术用在顶车机上在国内外属于首次。相比于液压系统,电动缸控制在速度、压力和位置方面更加精确,可以做到顶车控制和窑内各个被控制点的严格控制相匹配,大大提高了生产线的效率。电动缸不需要复杂的成套系统支持,(包括泵,管道,阀门,过滤器,很多接头等);可以节约很多的空间,而且在无维护的情况下,安全可靠的工作;没有油污的污染,大幅度降低噪音(噪声小于60分贝),保持洁净/安静的工作环境。
2 系统的技术原理及工作流程
产品技术原理是用电动缸代替传统顶车机的液压系统。顶车机控制系统采用PLC(本成果采用的是三菱Q系列PLC)+工控计算机控制。上位机(工控计算机)界面可以显示窑车的速度、位置、推力等数据,并且在PLC中实现闪图效果,便于操作人员迅速找出故障点的位置。下位机PLC软件设计上,按照冶炼工艺数据要求,融合采集到窑炉内数据信息,采用PID算法控制顶车机运行,通过PLC定位模块对伺服电机精准控制,进而精确控制窑车的运行速度和定位窑车的位置。
顶车机工艺流程如下:顶车机定时时间到——摆渡车前有摇车到位——摆渡车在回车线上准确定位——摆渡车上无窑车——夹紧装置为松开状态——推车机启动推动窑车上摆渡车——窑车到位——推车机返回——推车机到位停止——电磁夹紧装置将窑车夹紧——夹紧到位后——摆渡车正向启动,低速向窑头方向移动——摆渡车变高速运行——接近窑头时候变低速,继续向窑头移动——进入定位对轨状态——对轨成功——摆渡车停止——顶车机前进,将窑车顶入窑内——当顶车机到位后——顶车机返回——顶车机返回到位后——顶车机停止——摆渡车反向高速启动——摆渡车快速返回——转为反向低速——进入反向对轨定位——定位结束——摆渡车停止——将窑车顶到摆渡车前等待——等待下一次定位时间到。工作流程图如图1所示。

图1 顶车机和摆渡车工作流程图
3 系统的硬件设计
本系统采用三菱Q系列PLC,由CPU模块+I/O模块+定位模块+A/D模块+D/A模块+通信模块组成。I/O模块提供了无源节点的开关量输入采集,继电器输出等功能。定位模块选用4轴定位模块,开路集电极脉冲输出,具有定位功能,可以进行位置控制、速度控制、位置-速度切换控制功能等。顶车机、推车机、摆渡车采用的是伺服电机,通过对伺服电机的PID闭环控制,实现对小车的精确控制。A/D模块主要是采集窑车速度和推力的模拟信号,供操作人员实时观察和操控。硬件系统结构图如图2所示。
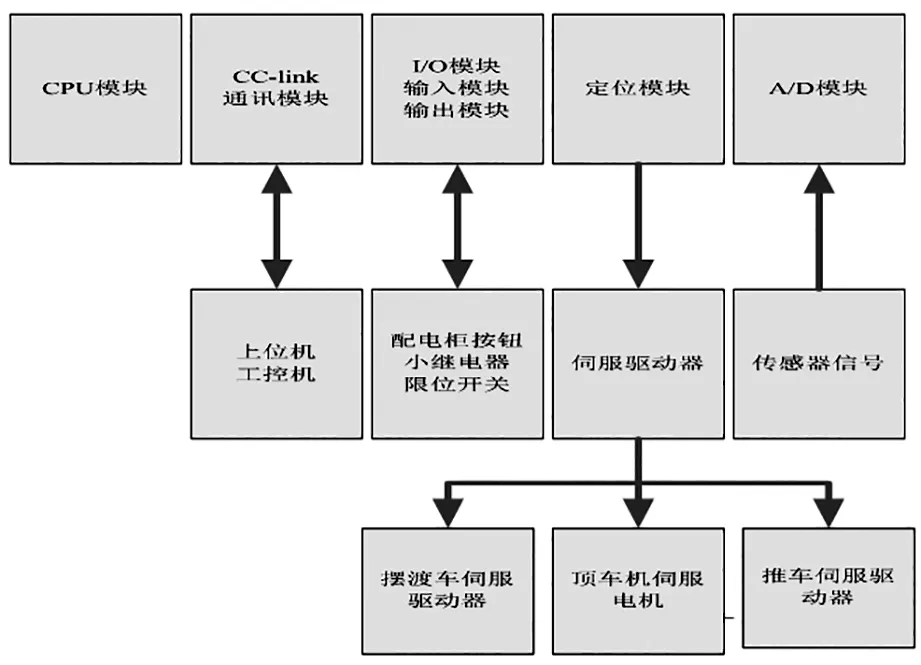
图2 硬件系统结构图
4 系统程序设计
编程软件用GX-Developer。程序中包括程序初始化、报警程序、速度控制程序、位置控制程序、A/D程序等部分组成。设备启动时,程序首先自检,检测个限位是否到位,满足初始条件后执行下步动作。
电动缸位置速度控制部分程序如图3。
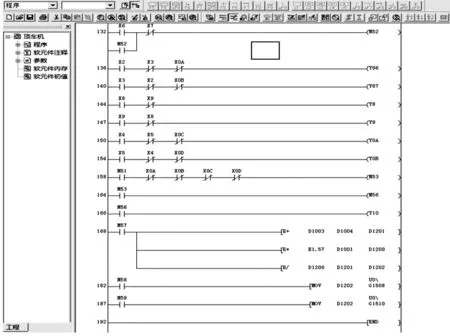
图3 顶车机位置速度控制部分程序
5 结语
本系统首次把电动缸应用在顶车机中,代替传统的液压系统,通过PLC和伺服电机,精确控制窑车的运动,提高了冶炼产品质量,提高了生产效率,静音效果好,改善了工作环境。
猜你喜欢
计算机与网络(2022年8期)2022-07-05 14:22:34
微特电机(2020年11期)2020-12-30 19:42:32
时代汽车(2020年21期)2020-03-03 05:03:34
机电设备(2018年6期)2018-12-28 06:49:14
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
中国质量万里行(2016年6期)2016-05-14 06:58:40
工业设计(2016年6期)2016-04-17 06:42:53
同煤科技(2014年1期)2014-08-15 00:48:23
数字技术与应用(2012年2期)2012-04-15 09:11:40
