基于激光传感器的收费站入口管控系统研究
2020-07-28 09:00钟秋黄国萍
价值工程 2020年20期
钟秋 黄国萍
摘要:为解决收费站入口治超对车辆造成物理性损伤的问题,提出一种基于激光传感器车型识别及智能治超一体化的管控系统。本系统主要由激光传感器、数据处理单元和必要辅助材料组成,结合智能算法,能够检测车辆的车型、轴型等信息,还可精确测量车辆的长度、宽度和高度等信息,配合车道软件和治超软件使用可实现智能治超。实际应用表明,本系统稳定可靠,测量精度高,抗干扰能力强,推广使用价值高。
Abstract: In order to solve the problem of physical damage caused by the entrance control of the toll station, a control system based on laser sensor model identification and intelligent governance is proposed. The system is mainly composed of laser sensor, data processing unit and necessary auxiliary materials. Combined with intelligent algorithm, it couldn't detect vehicle model, shaft type and other information, and could accurately measure the length, width and height of the vehicle, and cooperate with lane software and treatment. Ultra-software could be used to achieve intelligent governance. The practical application shows that the system is stable and reliable, and has high measurement accuracy, strong anti-interference ability and high promotion value.
关键词:激光传感器;收费站入口;车型识别;智能治超;一体化系统
Key words: laser sensor;toll station entrance;model identification;intelligent governance;integrated system
中图分类号:U491.8 文献标识码:A 文章编号:1006-4311(2020)20-0219-03
0 引言
超限车辆的违规运营对安全行车或运输造成了极大的危害,严重危及了自己和他人的生命安全和财产安全,诱发了大量的道路交通事故。因此,对超限车辆惩治和管理是必不可少的。目前,收费站入口治超大部分还处在加装强制限高限宽架、人工核查和人工录入的阶段,工作量大、效率低,同时存在对车辆造成物理性损伤的风险,不利于提高治超的效率和收费效率。另外,针对大客车及危险品车夜间闯禁行的行为,不能实时拦截。
因此引入一套自动化检测车辆长宽高及车型、轴型等信息,并能智能识别拦截超限车辆和解决大客车及危险品车夜间闯禁行,且稳定可靠,测量精度高的设备,将会大大提高入口治超的工作效率,并能快速实现数据共享,有利于提高执法的公正性,降低一線治超员工的工作量。
1 系统架构
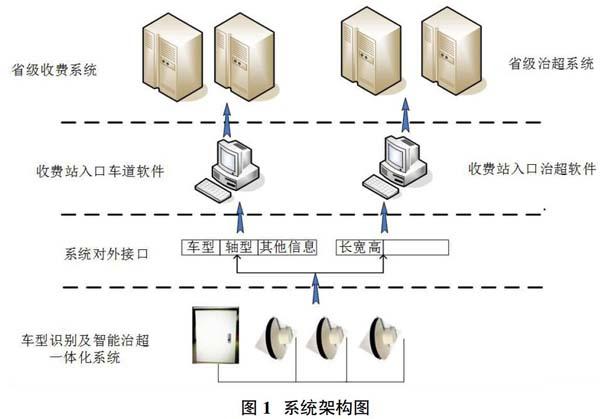
本系统主要由激光传感器、数据处理单元和必要辅助材料组成,设备安装简单,维护方便,无须破坏路面,是一种非接触式的检测设备。该系统基于先进的激光检测技术,通过扫描车辆三维外形实现车型、轴型和长宽高的检测,同时能够有效的识别行人和非机动车,具有测量精度高、抗干扰能力强等特点,系统架构如图1所示。
系统中的激光传感器是一种扫描式的测距传感器,采用脉冲和相位激光测距相结合的原理。通过鉴定发射脉冲和反射脉冲的相位求得两者时间差进而可以计算被测物体距离激光器之间的距离,通过高速电机带动,即可获得整个扫面上所有点距离激光器的距离。基于此原理,可以实现对过往车辆的轮廓进行扫描,获取车辆的外形特征数据。
数据处理单元采用ARM系列处理器作为核心控制器,通过TCP/IP接口与三个激光传感器通信,实时接收并处理三路波形数据,并将车型、轴型等信息以固定的协议格式上传到车道收费系统中,长宽高等信息上传到车道治超系统中。两系统分别接入省级对应系统中,实现各站数据的实时共享机制。
2 系统布局及工作流程
2.1 系统布局
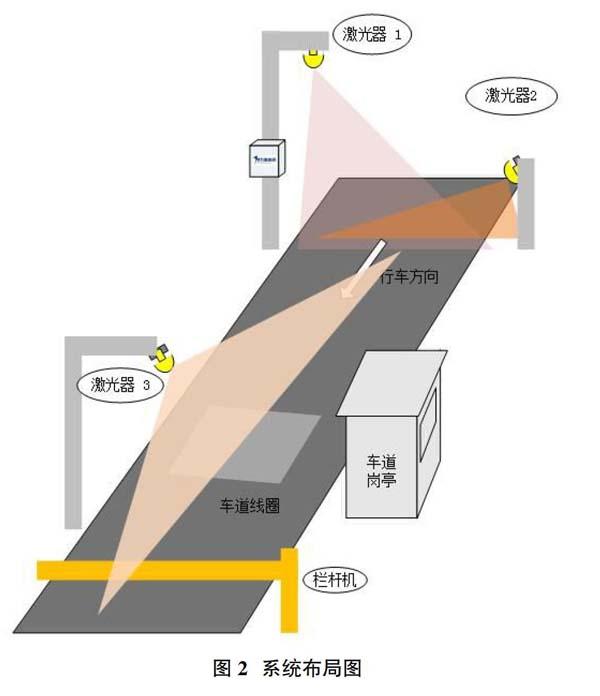
如图2所示,激光器1和激光器2分别通过L杆或立杆安装在车道两侧,两立杆在行车道方向上相差30cm,激光器1和激光器2的扫描方向与车辆行驶方向垂直,且激光器1安装高度大于6m,激光器2安装高度约为1.5m左右,向下倾斜20度。激光器3通过立杆安装或者通过车道顶棚吊装在车道正上方,安装高度约为6m,激光器3的扫描方向平行于车辆行驶方向。激光器3和激光器1(或激光器2)沿车辆行驶方向相距一定距离,该距离根据超限车辆的界限长度而定。
2.2 系统工作原理
当激光器1和/或激光器2检测到有车辆驶入扫描区域时,数据处理单元根据激光器1的扫描信息获取车辆的右侧面边界信息,根据激光器2的扫描信息获取车辆的左侧面边界信息,同时根据激光器1和激光器2的扫描信息获取车辆的顶部信息。当激光器1或激光器2检测到车辆驶离扫描区域时,数据处理单元根据激光器3的扫描信息计算车辆长度;同时数据处理单元根据激光器1和激光器2的扫描信息确定的车辆左右侧面边界信息和顶部信息计算车辆宽度和高度。
根据激光器2的扫描数据,对扫描数据进行分析,可实现车辆的轮轴识别。
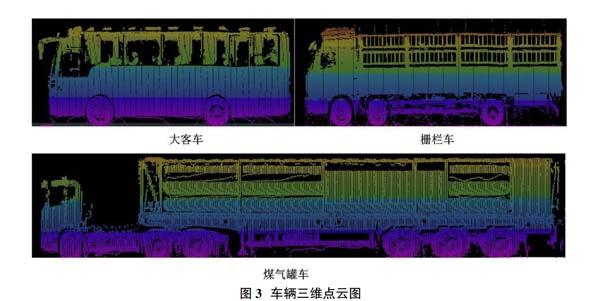
结合激光器1和激光器2的扫描数据,对扫描数据进行分析,根据提取的局部外形特征,可实现客货区分,以及一些特殊车型如两客一危的识别,如图3所示为车辆的三维点云图。
根据激光器3的扫描数据,分析车道内车辆的车头和车尾位置,从而实现车辆行进方向的判断,如果结合自动发卡机使用,可以实现倒车取卡预警功能。
数据处理单元分别将车型、轴型和长宽高信息上传到车道软件和治超软件,治超软件根据上传的长宽高数据判断是有有超限行为,如果有则告知车道软件不发卡,并让其控制栏杆机不放行。如果没有则告知车道软件写卡,抬杆放行。
3 数据交互流程
系统提供多种灵活的数据上传方式,同时支持有线以太网和串行通信方式,方便用户灵活应用,该系统与车道软件、治超软件的交互流程如图4所示。
系统启动时,与车道软件和治超软件建立连接。当车辆进入车道,行驶到岗亭触发线圈时,车道软件识别到车辆进入,发送数据请求命令包,系统接收到命令包后,解析校验,并分别将当前车辆的车型、轴型和长宽高等信息发送给车道软件和治超软件。如果车道软件和治超软件成功接收车辆数据包则返回应答信息包,反之,则不发应答信息包。系统在一定时间内,没有接收到应答信息包,会重发车辆数据包,直到成功接收到应答信息包,之后,清除当前车辆的信息缓存。
治超软件接收到车辆长宽高信息后,判断该辆车是否存在超限情况,并将情况结果发送给车道软件,车道软件接收治超系统的信息包后,根据信息包内容决定是否发卡、抬杆放行。
4 結论
本文基于收费站入口治超的现状提出了一套基于激光传感器的车型识别及智能治超一体化的检测系统,并就激光检测技术、系统布局、系统工作原理和数据交互流程等方面做了详细介绍。本文提出的系统已应用在多个收费站上,应用结果表明,该系统稳定可靠,测量精度高,抗干扰能力强。系统性能指标如表1所示,完全满足收费站入口治超的应用需求。
参考文献:
[1]武宏伟,唐川.激光式自动车型分类技术在ETC联网稽查中的应用[J].中国交通信息化,2016(s1):64-65.
[2]许俊,唐先亮.自动发卡车道车型识别解决方案探讨[J].中国交通信息化,2018(s1).
[3]林琪锋,荆嘉欣,邹剑涛,项国邦,陈发鑫.基于激光位移传感器的三维曲面逆向建模系统开发[J].价值工程,2019,38(20):140-142.