
基于无人机技术的煤矿带式输送机巡检方案
2020-07-27 09:48李标
煤矿安全 2020年7期
李 标
(1.煤炭科学技术研究院有限公司,北京100013;2.煤矿应急避险技术装备工程研究中心,北京100013;3.北京市煤矿安全工程技术研究中心,北京100013)
在矿山的安全生产中,带式输送机的巡检方式主要以人工徒步巡检为主,人工巡检方式主要依靠巡检人员完成对带式输送机定时、定点的监测,通过其工作经验与主观感知对带式输送机运行状态做出判断。那么这种方式也存在许多问题,一方面带式输送机测点多、工作量大,往往会出现漏检,误检等现象;另一方面带式输送机运行时,巡检人员无法对带式输送机上面做检查,对一些隐患无法给出即时的处理。同时传统人工巡检的方式工作强度大,可靠性不高,人力劳动成本大,难以满足现代化矿山的发展需要。随着带式输送机故障监测向着智能化、无人化的发展,如何为远距离带式输送机设计一种自动巡检的监测装置,如何利用先进的技术准确监测带式输送机的工作情况,减少人工巡检的负担,保障工人安全,成为当前重要的研究课题[1]。
1 带式输送机运输系统无人机巡检总体方案
带式输送机无人机巡检系统适用于煤矿井下,具有非GPS 导航功能,能够自主寻位和避障,可以在带式输送机沿线按规划路径自主或遥控飞行。无人机巡检时,可对带式输送机定点悬停拍摄,并将照片或视频信息通过无线网络,回传至管理平台,若中途故障,可给出报警提示[2],方便管理人员确认现场情况及管理。同时,无人机能够往返沿线布置的充电桩,并自动充电,减少管理人员工作量[3]。
2 无人机结构和工作原理
2.1 无人机结构
无人机采用四旋翼垂直起落飞行器方案。四旋翼与六旋翼和八旋翼相比,机械臂少,维护和安全处理减少;在飞行可靠性方面不占优,但是在气动效率上和结构上均有优点,在续航时间上,四旋翼比六旋翼和八旋翼均大20%~30%的续航时间,为满足井下远距离的巡检任务,因此考虑结构较为简单,续航时间较长的四旋翼飞行器机体方案,采用全封闭设计,适应煤矿井下防尘,防爆,防湿,防腐的工作环境需求。4 个半径相同的旋翼,以同一水平,分别布置在无人机的前后左右4 个方向。机身中间位置安装飞行控制器,4 个旋翼分别由4 个电机驱动,均匀分布在无人机支架段。
2.2 无人机工作原理
四旋翼无人机要实现不同的运动方式,则需要通过控制4 个电机的转速,从而实现旋翼的速度变化,来实现对无人机运行姿态和位置的变化。无人机有6 个状态的运动输出,即六自由度无人机,同时无人机又称为欠驱动系统。无人机工作原理示意图如图1。
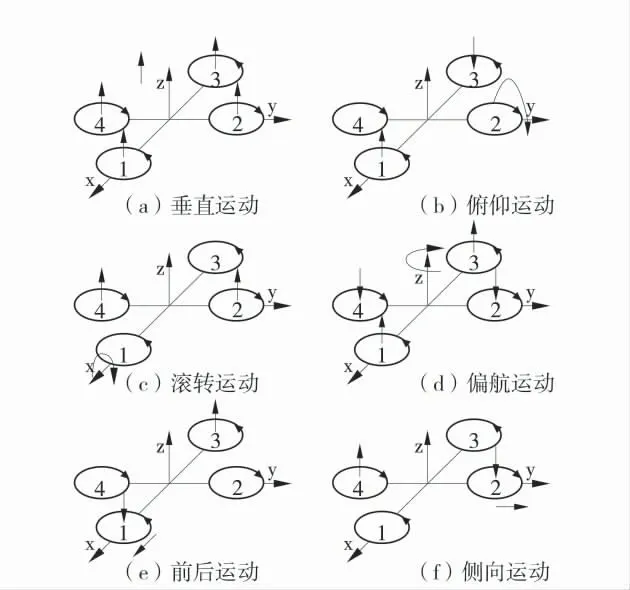
图1 无人机工作原理示意图Fig.1 Operation principle of UAV
当四旋翼无人机的旋翼1 和旋翼3 沿逆时针旋转,旋翼2 和旋翼4 沿顺时针方向旋转,那么当无人机的力矩达到平衡时,空气动力及陀螺仪效应均被抵消。在图1 中,旋翼1 和旋翼3 沿逆时针方向旋转,旋翼2 和旋翼4 沿顺时针旋转,规定正向运动为沿着x 轴正方向飞行,旋翼上方向上的剪头代表此处旋翼转速提高,旋翼上方的剪头方向向下,则代表此处旋翼转速下降。那么根据旋翼1 和旋翼3 的不同旋转方式以及转速的快慢,来提高无人机在煤矿井下飞行过程中的灵活性,可分为:垂直运动、仰俯运动、滚转运动、偏航运动、前后运动、倾向运动6个自由度[4]。
3 无人机导航
无人机的高精度定位与自主导航是实现无人机自主飞行的关键因素,由于煤矿井下无GPS 信号,且巷道空间狭小,障碍物较多、风尘大、光线昏暗等问题,因此在导航部分采用UWB 精确定位技术与光流导航技术相结合。
1)UWB 精确定位技术。通过UWB 定位系统做无人机矿井定位导航,准确引导无人机飞行,在矿井里工作。UWB 定位系统,需要在矿井内部布置定位坐标,搭建UWB 定位系统网络和后台服务系统,为无人机提供实时准确的定位信息。
2)光流导航技术。采用视觉识别导引无人机循迹飞行,循迹线类似于特征点编码,由摄像头采集视频信号后,导引无人机按固定路线,固定速度稳定飞行。循迹线使用混合彩色荧光剂油漆,在带式输送机沿线机架描绘导引线段,无人机安装大功率紫外灯,对导引线进行照射,导引线段被动发光变为可识别的光带[5]。
4 无人机避障
目前无人机主流的避障方式有:超声波避障、基于单目或双目的机器视觉避障、激光雷达避障,设计采用超声波避障和双目立体视觉的避障方式。
4.1 超声波探测
无人机在执行路径飞行时,如遇到前方有障碍物,超声波探头可以在1~2 m 处探测到障碍物距离,并传给飞控,飞控控制无人机刹车并悬停一定时间,如障碍物没有位移,飞控指引无人机左右移动一定距离侧向飞行,如障碍物消除则指引无人机继续前行,并沿原设定路径飞行。
超声波探测原理主要依靠时间测距法,已知超声波在空气传播介质中的速度为340 m/s,在超声波发射的时候进行计时,遇到障碍物进行反射,当接收装置接收到超声波信号时,计时立即停止,根据时间t 就可以得出距障碍物的距离信息。超声波易于定向发射、方向性好、强度易控制、受环境影响比较小、使用场合与被测量物体不需要直接接触的优点。超声波测距示意图如图2。
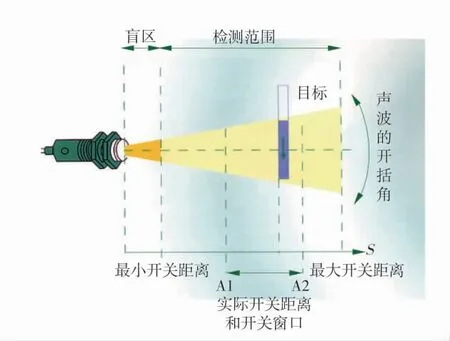
图2 超声波测距示意图Fig.2 Schematic diagram of ultrasonic distance measurement
4.2 双目视觉避障
通过双目视觉摄像头,获取视觉图像,再通过算法实现特征点提取,最终获得特征点的图像坐标,再通过双目视觉实现对图像深度的空间几何参数提取,以及空间位置姿态的精确计算,建立视觉范围里的3D 空间信息[6]。采用双摄像头组建双目视觉,更加准确的建立3D 空间,并且得到深度信息,建立立体视觉,通过SLAM 算法,主动计算出视觉范围里的场景,从而获取是否有障碍物,及障碍物的距离。引导无人机飞行和避障[7]。
双目视觉SLAM 分为前端(视觉里程设计V0),和后端,前端只要研究帧与帧的变换关系,通过对图像特征点的提取,然后进行特征点的匹配,最后利用RANSAC 算法去掉大噪声[8],通过匹配方法得到1 个位置和姿态的信息,再结合INS 系统中的IMU惯性测量单元,对无人机姿态信息进行滤波融合。
后端的主要作用是利用滤波理论或者优化理论,或者图的优化,对前端做出的结果进行再次优化处理,从而获得最优位姿估计[9]。
5 充电桩
以神东公司上湾煤矿402 巷道工作面6 km 带式输送机为例,沿线布置4 台充电装置,每个充电装置放1 台无人机,无人机巡检往返路程1.5 km,保证无人机的续航时间。充电桩示意图如图3。
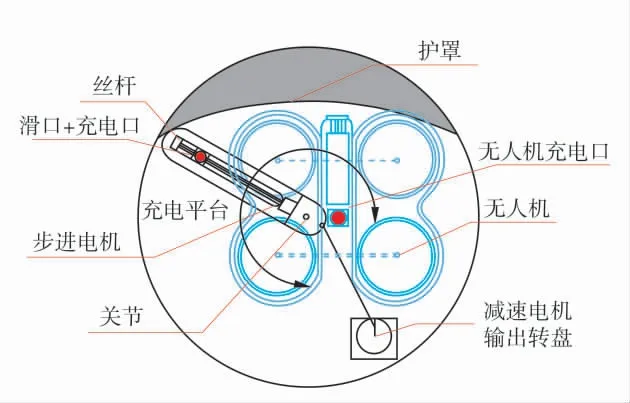
图3 充电桩示意图Fig.3 Schematic diagram of charging pile
充电桩为无人机充电,充电时间≤4 h。充电桩具有防护罩,封闭充电环境,同时,充电桩具有定位模块和充电口自动寻找装置,方便无人机寻位,及充电口对接。充电时,无人机定位充电桩,到达附近后,充电桩打开防护罩,无人机落入,然后关闭防护罩。减速电机控制充电轴360°旋转,寻找无人机位置;步进电机控制充电滑块沿丝杆滑动,寻找无人机充电口。充电口为电磁铁,无人机落入后通电,在充电轴扫描中,两充电口靠近时,因磁力自动吸合,开始充电。充电完毕后,电磁铁通反向电压,磁极反向,充电口脱离,停止充电,待无人机起飞时,打开防护罩,起飞后关闭[10]。
6 无人机飞行方案
无人机接收WIFI 起飞指令后,无人机开机,电机带动螺旋桨旋转起飞,同时超声波探头和摄像头采集数据,视觉识别荧光带方向。超声波探测到距离巷道顶部的距离,指引飞行器起飞达到距巷道顶部的指定距离,视觉识别指引无人机机头对准导引亮带,向前飞行。飞行时视觉识别每个亮带的节距,计算飞行距离及速度,并自动避障,同时无人机根据电压及最近充电桩距离,逻辑判断是否需要充电。无人机通过WIFI 网络与控制系统交换数据,指引在目的位置悬停拍摄,并将图像数据返回控制系统。巡检结束后,返回充电桩充电,等待下次任务。
无人机能够按照预先设定的路径飞行,实现自动导航、自主飞行。无人机亦可以通过遥控飞行,接收不到遥控信号,则自动改为自主飞行模式,保证无人机飞行安全。
7 结 语
无人机的巡检在各行各业已广泛卡站,在煤矿井下的应用尚属首例。无人机巡检通过搭载不同的检测传感器及网络摄像机,可以实时高效的检测带式输送机沿线的环境参数,以及通过视频分析检测是否有异物,大块煤,是否有人违规操作等,最终将检测数据通过WIFI 信号传输至监管平台,提高了对带式输送机检测的效率,减少了工人的劳动强度,无人机样机已在神东公司上湾煤矿402 工作面已完成试飞,试飞效果基本达到预期目标。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
制造技术与机床(2019年11期)2019-12-04
电子制作(2019年20期)2019-12-04
电子制作(2019年9期)2019-05-30
西安工程大学学报(2016年6期)2017-01-15
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年8期)2016-11-16
现代计算机(2016年11期)2016-02-28
橡胶工业(2015年6期)2015-07-29
