利用倾斜摄影测量快速构建桥梁三维模型
2020-07-25 06:31耿传芝范玉红
甘肃科技 2020年4期
何 必,耿传芝,范玉红
(1.山东交通学院交通土建工程学院,山东 济南250357;2.济南适航信息科技有限公司,山东 济南250002)
桥梁是最重要的交通基础设施之一,它不仅承担着传统的渡河工程功能,在现代公路、铁路等基础设施中,高架式桥梁结构也是其重要的主体构成部分。桥梁的施工和运营阶段管理的科学性和有效性是发挥桥梁功能,保障交通畅通的重要基础。随着计算机硬件功能的飞越式发展,可视化以及三维可视化的信息管理方式逐渐成为桥梁管理的现实需求和可行途径,因此,桥梁的三维数字化建模便成为一项重要的基础工作。传统的桥梁三维建模大多是基于桥梁的CAD设计图纸,运用3DMAX等三维建模工作进行人工建模,这种方式借助于3DMAX等软件的功能具有较好的美观性,但是由于其所有数据都是根据图纸获得,因此完全与工程实际脱离,在真实性上具有天然的缺失,同时模型不具备空间地理属性,无法实现后期的空间操作等功能。倾斜摄影测量是直接在桥梁实地现场进行测量,再经过后期内业处理获得桥梁的三维模型,其具有真实、空间地理信息丰富的优势,能够满足后期对桥梁实行信息化管理的要求。
1 倾斜摄影测量
倾斜摄影测量是近年兴起的一种摄影测量方式,它与传统的正射摄影测量的区别在于它使用多个摄像头对被测区域进行拍照,由于其部分镜头设置为非垂直地面的倾斜角度,因此能够拍摄到被测区域的立面信息,从而能够获取被测对象整个外部表面的空间位置数据,进而建立被测对象的三维模型,大大改进了传统的正射摄影测量只能获得被测对象顶部信息的不足。利用倾斜摄影测量建立地物三维模型的技术流程如图1所示。

图1 倾斜摄影测量三维建模技术流程
2 外业工作
外业工作是倾斜摄影测量获取被测对象照片以及必要的地面控制点坐标的工作。当前用于倾斜摄影测量外业航测的飞行载具一般使用多旋翼无人机。在本文的研究过程中,选用了大疆精灵4多旋翼无人机作为外业航测的飞行载具,大疆精灵4多旋翼无人机自带云台和摄像头,能够满足外业航测的需求。根据本文建模的桥梁实际情况,在飞控软件中设定无人机的飞行参数见表1。
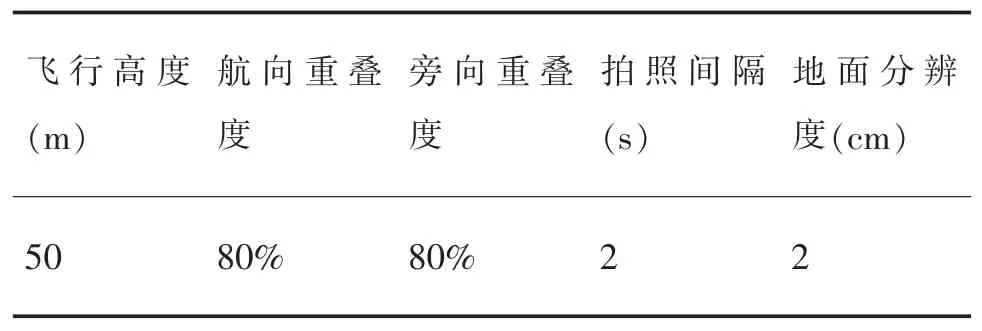
表1 外业飞行参数设置
根据设置好的飞行参数,飞控软件自动划定飞行航线如图2所示。

图2 飞行航线图
飞行参数和飞行航线设置完毕后,将飞行任务上传至无人机,开始外业航测,共用时1小时22min完成单次外业航测任务,获取相片共计310张。
地面控制点是指在测区选定一定数量的点,通过精确测量其在国家标准坐标系中的坐标,从而以这些控制点为基准,计算出测区中其它各点在国家标准坐标系中的坐标,赋予桥梁模型标准坐标,增强桥梁模型的通用性。本次研究在测区选定桥梁施工时的基础控制点三个,此三个地面控制点具有西安1980坐标系中的标准坐标,从而可为桥梁模型的坐标换算提供基础。其点位分布如图3所示。

图3 地面控制点分布图
3 内业工作
内业工作主要包括空三运算和三维模型生成。本文的空三运算和三维模型生成均使用ContextCapture软件。空三运算是对较少的野外控制点进行加密的过程,继而生成点云以自动形成后期的三维模型。首先将原始数据,即外业获取的照片以及记录无人机位置信息的POS数据导入到ContextCapture软件中,经过相片对齐处理,空三运算,点云提取等过程,软件自动生成最终的三维模型。内业的空三运算以及三维模型生成因为涉及到大量的运算,因此计算机自动运算和处理的过程一般耗时较长,本文所生成的模型处理过程耗时12h。
4 三维模型成果
针对本次所建模的桥梁,为体现施工不同阶段的对比效果,在三个施工阶段分别进行了倾斜摄影测量和三维建模工作,得到了三个阶段的现场三维模型,效果如图4所示。从图中可以看出桥梁的箱梁顶推合龙过程。同时,所建立的三维模型具有完整的空间位置信息,因此能够在模型中直接进行包括距离、面积、体积等各种基于空间位置信息的结果查询,其查询效果如图5所示。

图4 不同施工阶段的三维模型

图5 空间信息的查询
5 结语
无人机倾斜摄影测量以其作业速度快,外业工作强度小的特点在测绘行业越来越受到重视,针对基建领域对于桥梁三维建模的需求,将无人机倾斜摄影测量技术引入,能够快速完成建模任务,所建立的三维模型同时还具有完整的空间位置数据信息,能够做为BIM或GIS的数据源,进而利用BIM或GIS对桥梁进行进一步的信息化管理,是交通土建工程信息化管理工作的良好技术路线。在未来的发展中,如何克服小型无人机受风速、降雨、超高建筑、大气可见度等环境因素的影响,扩大无人机倾斜摄影测量的可用范围,是值得进一步研究的空间。
猜你喜欢
建材发展导向(2022年12期)2022-08-19
西部交通科技(2021年9期)2021-01-11
四川建材(2020年6期)2020-01-04
中国交通信息化(2019年3期)2019-06-18
智能建筑与智慧城市(2018年11期)2018-11-28
江西建材(2018年4期)2018-04-10
中国资源综合利用(2017年2期)2018-01-22
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
中国房地产业(2016年2期)2016-03-01