
4轮循迹小车过弯性能优化研究
2020-07-24 10:17谢智阳
汽车电器 2020年7期
谢智阳 , 谭 勇
(1.河源职业技术学院,广东 河源 517000;2.河源市工业机器人技术应用工程技术研究中心,广东 河源 517000)
一直以来,智能小车、循迹小车都是机器人基础领域研究的热点,如文献[1]将智能小车应用于机器人巡逻领域,然而良好的移动性能应需具备在直线赛道时快速稳定运行,在遇到各种弯道时能平稳快速通过,为此需在小车的机械机构、动力驱动和控制算法上进行优化设计。文献[2-4]运用模糊控制策略在智能车控制中取得了一定的控制效果,文献[5]将灰色PID控制算法应用于智能车控制系统。然而众多研究中却忽略了PWM驱动频率和传感器的安装位置对智能小车控制的影响。本文以Arduino Uno为控制核心设计了4轮驱动循迹小车,重点在这两个方面进行了实验研究。
1 系统总体设计方案

图1 系统总体设计框图
系统总体设计框图见图1。该系统以Arduino UNO单片机为控制核心,主要由14V电池、DC-DC可调降压模块、电机驱动模块BTS7960、黑皮电机、光电传感器、红外传感器和车体组成。由于系统采用了4轮电机进行驱动,因此选用了相对高电压和大容量的14V电池模块,确保系统的稳定运行。14V电池模块经DC-DC可调电压模块降压后给单片机系统和传感器等部件供电。
1.1 驱动模块设计
本文采用BTS7960芯片组成的全H桥驱动模块来驱动黑皮电机,在电路中加装了光耦器件以减少驱动对单片机的干扰冲击,使单片机可以正常稳定工作。该电机模块在紧急制动、驱动方面具有良好的使用效果。
1.2 直流电机选型
电机是小车主要的动力装置,步进电机和直流电机是市面上主要的两种驱动电机。步进电机的优点是对速度跟移动距离的控制更加精准,但最大的缺点是移动速度相对缓慢,没有直流电机速度快;一般的直流电机,速度虽快,但扭矩不够,容易造成空转。因此本文采用GM25-370黑皮微型直流减速电机 (减速比1∶20),空载转数参数为490r/min、0.3A,较大的扭矩可以适应复杂路段,具有较强的动力及制动性能。
1.3 循迹模块设计
循迹传感器用于检测赛道的信息,其前瞻性和检测精度是影响小车的过弯性能和速度的重要因素。本文选用5路红外循迹模块,为了让小车具有较好的前瞻性,在小车设计上采用的是短轴距的设计理念,将小车的循迹模块前移5~7cm,这样可以让系统提前获取赛道信息并进行预判,更容易在弯道中提前转弯,走出最优路径。模块安装距离车轮较短,会导致小车反应时间过短,预判性不强,性能较差;模块安装距离车轮较长,会导致在上坡时发生剐蹭,到达坡顶时亦会丢失信号,导致小车失控。本文采用“八”字形对传感器进行非均匀分布布局,中间密两边疏,以提高检测的连续性,利于算法控制,具体布局见图2,模型3D设计图见图3。

图2 5路循迹模块安装位置图
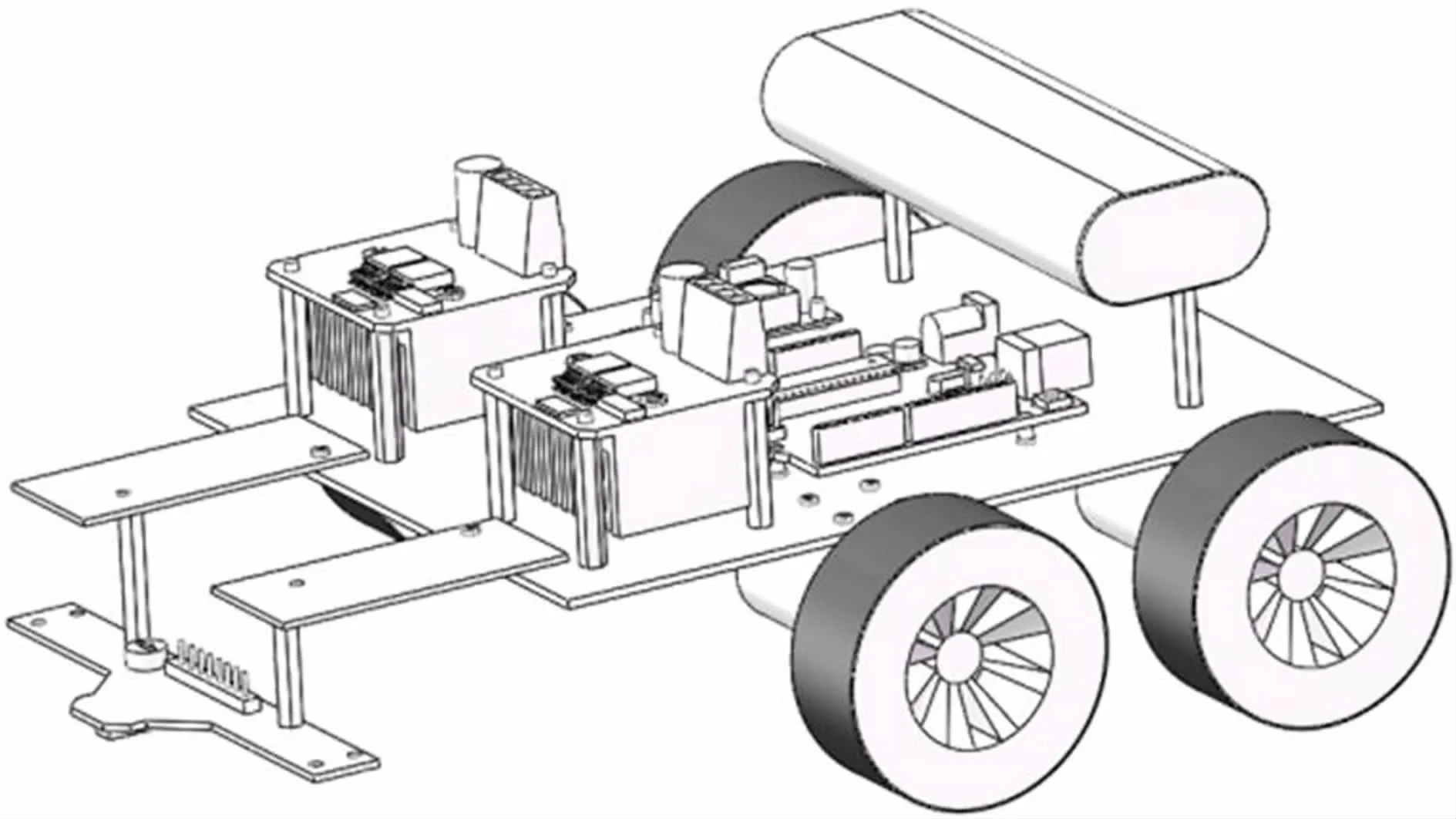
图3 智能小车设计模型图
1.4 转向策略
本文所设计的小车并无转向机构,需要通过4个轮子的差速实现转弯。以单片机为控制核心,5路循迹模块、电机驱动模块和黑皮电机形成闭环控制,该闭环的输入为5路循迹模块对路径判别经模糊控制处理后输出PWM所需的值,控制电机驱动模块直接驱动4个轮子的电机。以小车的位置情况作为赛道路线判别反馈给单片机,形成一个闭环控制系统,具体策略见图4。

图4 智能小车转向系统图
小车在赛道行驶过程中,要求精准控制转弯角度,本文通过4个黑皮电机差速控制实现小车转向,针对小车转弯角度θ有:当θ>0时,左电机反转,右电机稍微减速,小车向左转向,u左<u右;当θ<0时,右电机反转,左电机稍微减速,小车向右转向,u左>u右;当θ=0时,左右电机同速运行,直向行驶,u左=u右。
2 小车控制程序设计
2.1 循迹传感器映射
通过5路循迹模块上的LED指示灯工作状态判断小车的实际路径探测情况。为了能更加准确地判断出小车的运动状态,制定了LED指示灯与小车运动状态对照表,见表1,用于后续的编程实现。

表1 小车运动状态对照表
2.2 总体控制流程
为了避免多个if语句来判断是否接收信号带来的延迟,本文采用switch语句,可以从性能上提高小车的控制实时性,对5路循迹传感器采集的路径信息进行加权求和,并将结果赋值给Possum,通过判断Possum的值选择性执行相关的子程序,具体控制流程见图5。
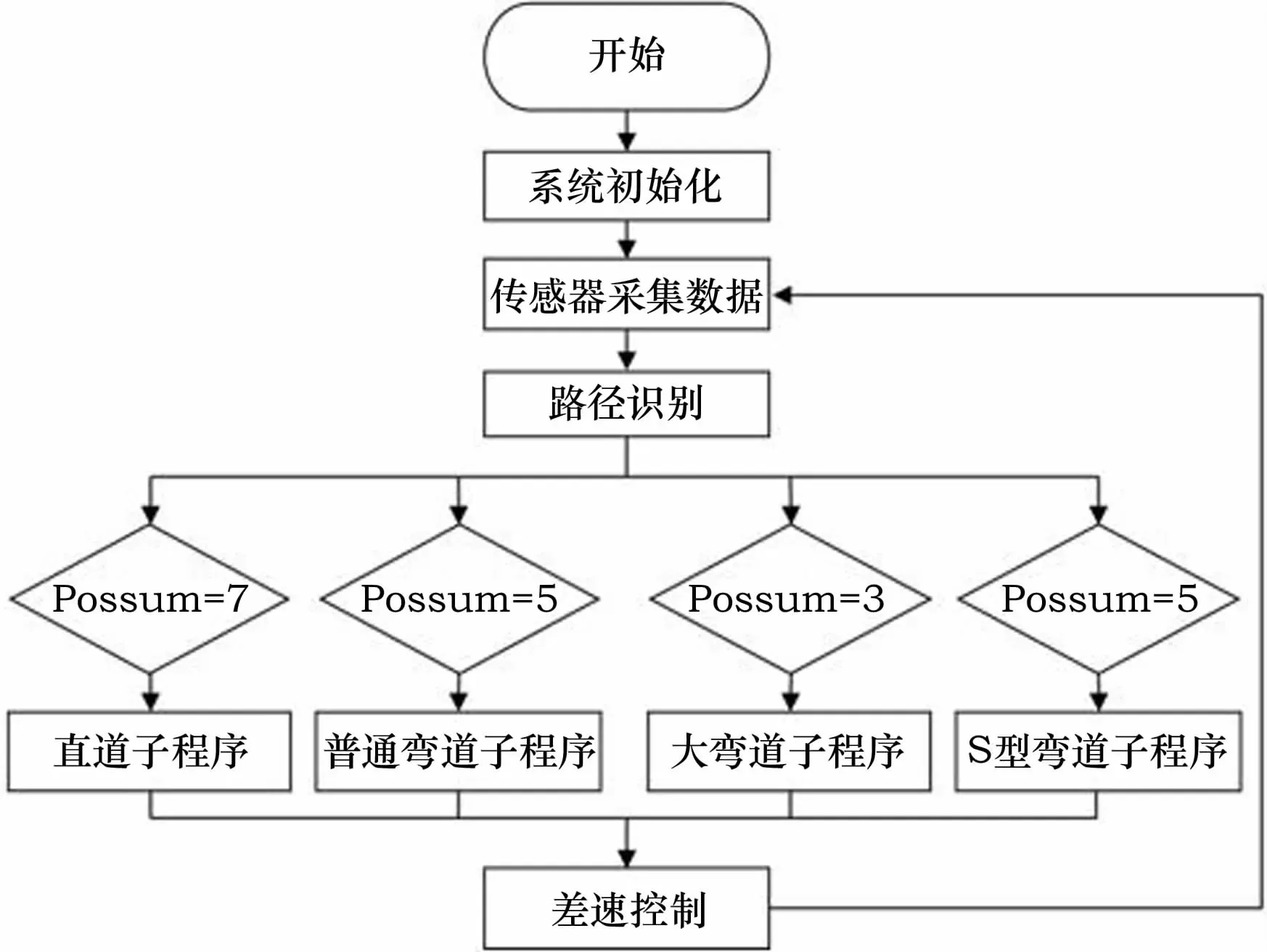
图5 系统程序框图
本文的试验赛道中有直道、普通弯道、大弯道、S型弯道和上下坡等情况,赛道情况复杂,单一的控制方式难以获得良好的控制效果,需对各种弯道调试出小车的控制程序及相关的PWM参数值。
3 系统的测试与分析结果
3.1 调试PWM频率
直流电机的PWM调速方式大致可分为3种,分别是调频调宽法、定宽调频法和定频调宽法[6-9]。定频调宽法是目前最常用也是最有效的方法,本文用此方法对驱动电机进行调速,PWM调速策略除了受占空比的影响之外,PWM信号的频率亦会对电机的调速产生较大的影响,因此首先需通过试验获得PWM调速的最佳频率,然后再通过调整PWM的占空比实现对电机的调速。
经实验测试,驱动电机的PWM频率小于150Hz时,小车速度抖动明显,PWM频率大于500Hz时,小车行驶速度随着频率的增高而下降。本文最终确定PWM的频率为490Hz,小车在该频率点工作平稳,控制效果较好。
3.2 循迹传感器前瞻性对差速转向的影响
经测试,小车在低速的时候稳定性良好,当车速高于一定值时,小车时常冲出赛道。在此背景下,本文通过实验研究了传感器安装距离对小车差速转向的影响,为此,设定了3种实验方案,运用相同的控制方法沿赛道跑3圈,并记录运行3圈的时间,观察小车沿黑线行驶性能,在失误的地方做标记。
1)方案1:传感器与车前轮的距离为5cm,轮胎使用65mm的抓地胎。
2)方案2:传感器与车前轮的距离在5cm的基础上加长5~7cm,轮胎使用65mm的抓地胎。
3)方案3:传感器与车前轮的距离在5cm的基础上加长10cm,轮胎使用65mm的抓地胎。
测试数据如表2所示,各种过弯的轨迹图如图6所示。实验表明,方案2取得了最佳效果。
3.3 坡道试验分析
由于循迹传感器前瞻过长,在坡顶时,小车容易接收不到信号,导致飞出赛道。实验结果表明,适当地增加小车的前瞻性,小车能以较快的速度稳定地通过各种弯道,并且运行轨迹非常理想,小车始终沿着赛道中心线的位置运行。在速度较快时,有效缓解了电机响应速度慢和转弯不连续的缺点,同时增加了控制的实时性。图7为小车上坡检测距离图。

表2 实验数据表
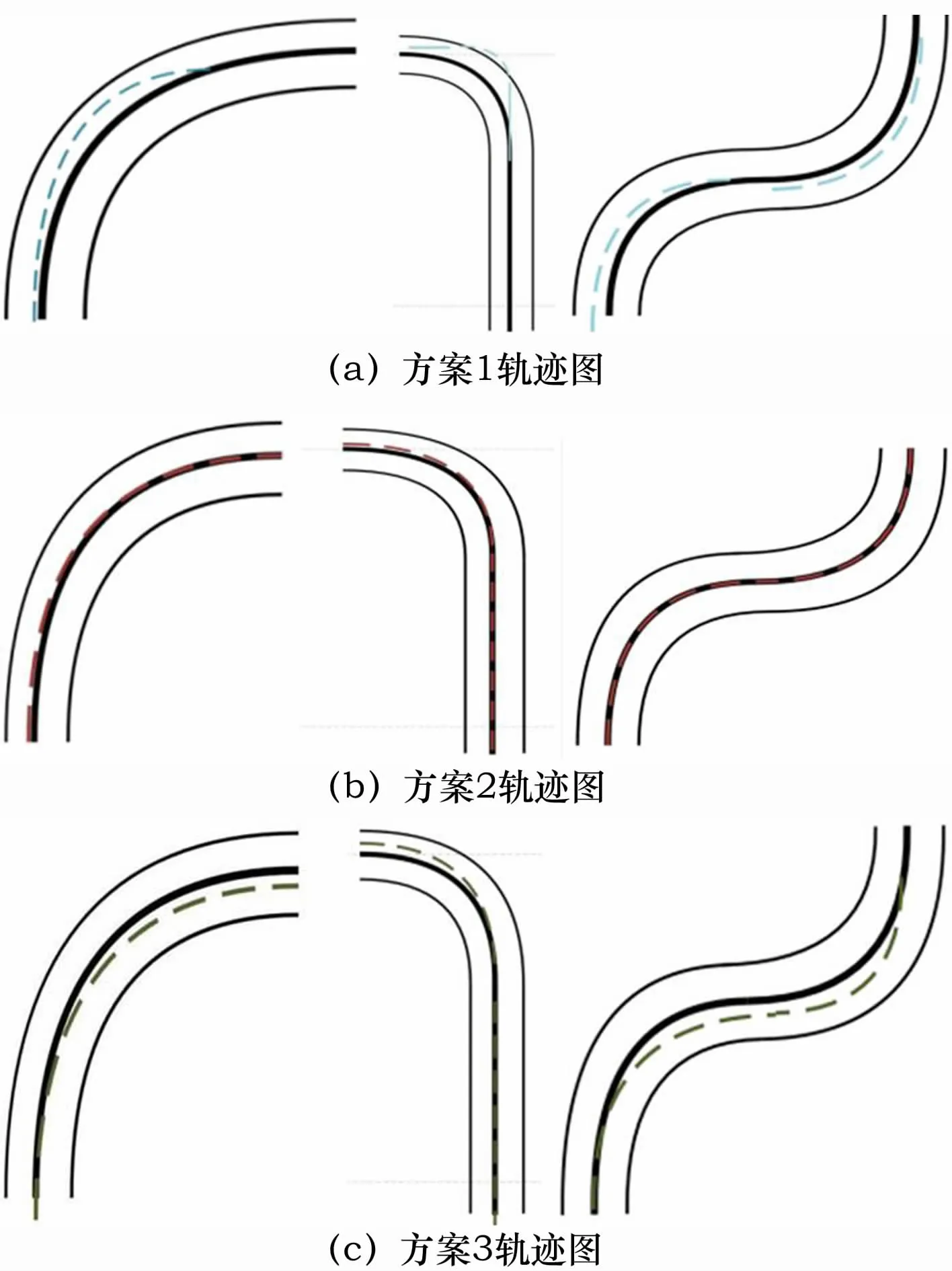
图6 3种方案过弯轨迹图

图7 小车上坡检测距离图
4 结论
本文以Arduino单片机为控制核心,阐述了4轮小车的硬件设计思路和软件控制策略,并得出了部分模块的参数、硬件布局和系统软件设计流程,实验分析了PWM技术对黑皮电机调速性能的影响,以及分别从3个实验方案实验测试了传感器布局和前瞻性对循迹小车差速转向系统的影响。实验得出了最佳的PWM控制频率和最优的传感器布局距离,有效增加小车控制的实时性、响应性,运行速度较快且很稳定。本文给出的研究方法能有效提高循迹小车控制效果,是提高比赛成绩的有效策略。
猜你喜欢
幼儿教育·父母孩子版(2019年5期)2019-10-18
文苑(2018年22期)2018-11-19
小猕猴智力画刊(2018年2期)2018-02-26
小猕猴智力画刊(2017年6期)2017-07-03
电脑知识与技术(2017年5期)2017-04-08
新少年(2017年1期)2017-03-15
作文大王·笑话大王(2017年1期)2017-02-21
电脑知识与技术(2016年17期)2016-07-23
无线互联科技(2015年6期)2016-03-05
小天使·五年级语数英综合(2014年8期)2014-06-26
