FANUC机器人故障分类和诊断方法
2020-07-23 10:22邢增智
写真地理 2020年9期
邢增智
摘 要: 介绍了FANUC R2000iB型机器人故障的分类和基于LED指示灯的故障诊断,对故障原因进行可详细的分析,并提出了相应的解决方法。
关键词: FANUC;焊接机器人;故障诊断
【中图分类号】TP242;TP181 【文献标识码】A 【文章编号】1674-3733(2020)09-0225-02
引言: 机器人广泛应用于汽车制造焊接、搬运、喷涂等工作,公司焊装车间主焊线,就是一条由FANUC和ABB焊接机人组成全自动焊接生产线。由于工业机器人是融机械、电子、信息、传感、计算机、控制等多个学科技术为一体,不仅要求管理维护人员掌握工业机器人技术基本理论,还要求掌握机器人安装、调试、系统编程、维修等技能,机器人故障比一般设备故障较难解决,引起停机时间较长。本文根据实际工作经验,简要介绍FANUC R2000iB型机器人故障分类以及诊断方法,供致力于机器人维护人员共同探讨。
1 FANUC控制系统简介
FANUC机器人控制系统采用32位CPU控制,以提高机器人运动插补运算和坐标变换的运算速度。采用64位数字伺服驱动单元,同步控制6轴运动,运动精度大大提高,最多可控制到21轴,进一步改善了机器人动态特性。
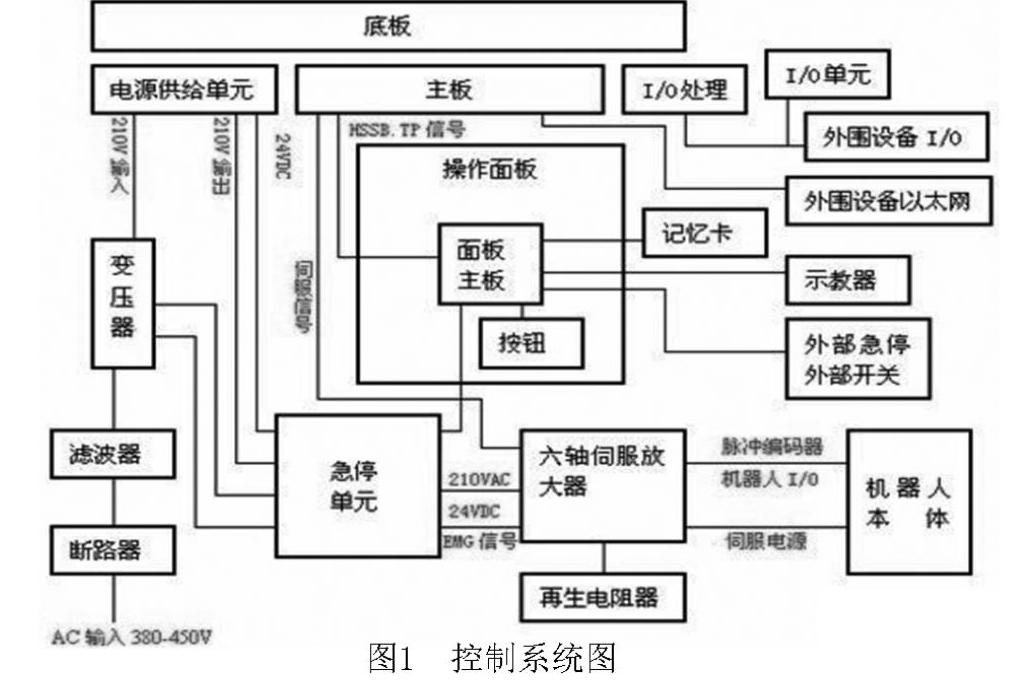
控制器是机器人的核心部分,实现对机器人的动作操作、信号通讯、状态监控等功能。以FANUC-F-200iB为例,控制系统主要有7大部分组成:
1)电源供给单元
变压器向电源分配单元输入230V交流电,通过该单元的系统电源分配功能对控制箱内部各工作板卡输出210V交流电及±15V、+24V直流电。
2)安全保护回路
由变压器直接向急停单元供电,并接入内部各控制板卡形成保护回路,对整个系统进行电路保护。
3)伺服放大器
不仅提供伺服电机驱动和抱闸电源,并且与绝对值编码器实现实时数据转换,与主控机间采用光纤传输数据,进行实时信号循环反馈。
4)输入/输出模块
标配为ModuleA/B,另外也可通过在扩展槽安装Profibus板、过程控制板与PLC及外围设备进行通訊。
5)主控单元
整个控制系统的中枢部分,包括主板、CPU、FROM/SRAM组件及伺服卡,负责控制器内部及外围设备的信号处理和交换。
6)急停电路板
用来对紧急停止系统、伺服放大器的电磁接触器以及预备充电进行控制。
7)示教器
包括机器人编程在内的所有操作都能由该设备完成,控制器状态和数据都显示在示教盒的显示器上。
2 故障报警分类
FANUC机器人动作、运转发生某种异常时,为了迅速排出故障,首先要明确掌握现象,并判断是什么原因出现问题而导致的异常。常见故障可分为四类:
第一类故障
症状:控制器死机,机器人无法动作,示教器面板一片空白。
潜在的原因:1)控制器AC;2)控制断路器;3)变压器;4)控制器直流电源线路;5)示教器/电缆;6)电源供给模块;7)开关电路;8)面板电路板保险丝;等存在问题
检修心得:第一类故障主要是电源供给存在问题,因此检查控制柜里面跟电源供给相关联硬件。
第二类故障
症状:机器人可以上电,但示教器锁死,没有反应
潜在的原因:1)软件故障;2)主板CPU模块、DRAM FROM/SRAM模块故障;3)PSU或者底板的问题;4)辅助控制卡的问题;
检修心得:第二类故障主要是软件故障,导致示教器死机,以上导致原因没有先后顺序,需要根据现场实际,选择先容易检查的,处理容易处理的。
第三类故障
症状:故障指示灯亮,伺服没有电源,屏幕上可以看到一些诊断信息。
潜在的原因:伺服放大器、马达/spc 、编码器、紧急停止单元、紧急急停电路、面板电路,电缆问题等存在问题;
检修心得:如果发生第三类错误,示教盒的顶部将显示出相应的SRVO-XXX警报。再根据报警具体信息,参考FANUC机器人使用手册处理方法进行检查。
第四类故障
症状:机器人只能在手动模式下工作,能够从示教器里运行程序。
潜在的原因:通讯或者I/O问题,与PLC之间没有通讯,检测开关等损坏,不正确的当地/远程开关设置。
检修心得:当设备进程无法正确执行时,通常就会出现第四类故障,机器人可以在手动模式下工作。此时故障不是控制柜内部问题,而是控制柜输入输出信号不满足或者与第三方PLC无法通讯,没有启动运行条件,需要对互通PLC进行监控才能找出故障原因。
3 故障诊断方法
在生产实际中常用的故障检查方法有直接观察法、通电检查法、断电检查法、电压检查法、电阻检查法、短接检查法和元件替代法等,而FANUC机器人在系统控制设置完善的故障报警LED指示灯,因此通过直接观察法对各单元中LED指示灯进行检查,就能快速诊断出现的故障问题。
3.1 主板七段码LED指示灯报警
1)显示“0”,代表安装于主板的CPU卡中RAM发生了奇偶校验错误,处理方法:更换CPU卡或者主板;2)显示“1”,代表安装于主板上的FREOM/SRAM模块中的RAM发生了奇偶校验错误。处理方法:更换FREOM/SRAM模块或者主板;3)显示“2”,代表通讯控制器发生了总线错误。处理方法:更换主板;显示“3”,通讯控制器的DRAM发生了奇偶校验错误。处理方法更换主板;4)显示“4”,代表与面板通讯时发生了通讯错误。处理方法:①检查主板与面板之间的通讯电缆,损坏则进行更换;②更换主板或者更换面板;5)显示“5”,代表主板发生伺服警报。处理方法:①更换轴控制卡;②更换主板。6)显示“6”,发生SYSEMG警报。处理方法:①更换轴控制卡;②更换CPU卡;③更换主板;7)显示“7”,发生SYSFAIL警报。处理方法:①更换轴控制卡;②更换CPU卡;③更换主板;
3.2 供电单元(PSU)故障指示
故障1:ALM LED(red)亮PSU报警。处理方法:①查看PSU上的F4(+24V)保险丝,损坏则更换。②检查PSU上的+5V、+15V、+24V电压和与其连接的相关电缆、设备,如有损坏则更换。③更换PSU
故障2:PIL LED(Green)不亮,PSU的200V电源没有。处理方法:1、检查PSU上的F1保险丝,损坏则更换;措施;2:更换PSU;
3.3 面板电路板(Panel Board)故障指示
故障1:该RDY LED(Green)不亮,即面板电路板与主板间通讯中断。
处理方法:①检查主板与面板电路板之间的通讯电缆,损坏则更换;②更换主板;③更换面板电路板;
故障2:该PON LED不亮,即面板电路板上+24V电压转+5电压失败。处理方法:①检查CRM63接头,+24V输入电源是否正常;措施;②更换面板电路板;
3.4 I/O板故障指示
故障1:ALM LED点亮,即主板与I/O板之间通讯错误。处理方法:①更换I/O板;②更换主板;③更换I/O通讯电缆;
故障2:I/O板保险丝损坏。处理方法:①更换保险丝;②检查外设电缆;③更换I/O板
3.5 伺服放大器故障指示
故障1:P5V LED(绿色)指示灯不亮,说明伺服放大器的输出电压+5V工作不正常;处理方法:①检查机器人的连接电缆(RP1),检查+5V的电线是否有问题;②替换伺服放大器;
故障2:P3.3V LED(绿色)指示灯不亮,说明伺服放大器的输出压+3.3V工作不正常;处理方法:替换伺服放大器
故障3:SVEMG LED(红色)指示灯在机械没有紧急停机时点亮或者在机械紧急停机时没有点亮;处理方法:更换伺服放大器。
故障4:ALM LED(红色)指示灯,在机械没有故障时点亮或者机械没有故障时点亮;处理方法:更换伺服放大器;
故障5:RED LED(绿色)指示灯在马达已经被激活时还不发光。处理方法:更换伺服放大器;
故障6:OPEN LED(绿色)指示灯不点亮,说明伺服放大器和主板之間通讯不正常;处理方法:①检查FSSB的光缆连接;②更换伺服卡;③更换伺服放大器。
故障7:D7 LED(红色)LED指示灯在预充电已经结束时还没发光。处理方法:①有可能是DC连接短路,检查连接;②有可能是充电电流控制电阻器出错,替换紧急停机单元;③更换伺服放大器。
4 总结
通过以上知识的学习,我们对FANUC机器人的故障分类以及关键部件诊断方法有了理解,对于维修而言,每个故障的现象都不一样,需要在维修过程中,举一反三,不断总结,才能使机器人得到更好的使用和维护。
参考文献
[1] FANUC公司.FANUC机器人用户参考手册 2005.
[2] 许礼进、赵永峰.FANUC点焊机器人故障分析及排除.2009(2):33-34.
猜你喜欢
装备制造技术(2020年3期)2020-12-25
教育教学论坛(2017年9期)2017-03-20
亚太教育(2016年31期)2016-12-12
北京航空航天大学学报(2016年6期)2016-11-16
企业文化·下旬刊(2016年4期)2016-04-28
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
机械制造文摘·焊接分册(2014年3期)2014-08-14
振动、测试与诊断(2014年5期)2014-03-01
机械与电子(2014年1期)2014-02-28
河南科技(2014年3期)2014-02-27