
紧急制动系统分层控制策略研究
2020-07-23 07:01周志军陆春伶周良杰
时代汽车 2020年8期
关键词:模糊控制
周志军 陆春伶 周良杰

摘 要:针对紧急制动系统进行了阶段划分,提出一种结合避撞安全与车辆稳定性的紧急制动系统分层控制策略,并进行仿真与实车试验,提高了避撞准确性与安全性。在建立车辆动力学模型的基础上,设计了上层决策控制器,以安全车距为控制目标的中层控制器,以车辆稳定性为目标的底层控制器。采用驾驶员激进程度与碰撞时间模糊控制器优化了系统触发,基于车辆模型确定了期望制动减速度,通过车轮转矩分配优化了车辆稳定性;搭建了CarSim与MATLAB/Simulink联合仿真模型与实车测试环境,对控制策略进行了离线仿真与实车试验。研究结果表明,车辆紧急制动效果良好,满足了避撞需求。
关键词:紧急制动系统;车辆稳定性;分层控制;模糊控制
1 引言
随着汽车保有量增高,由驾驶员缺乏经验、注意力不集中、疲劳驾驶等造成的碰撞事故比例逐年增大。紧急工况下,制动辅助系统可有效的降低碰撞事故的发生,使用前碰撞预警FCW与自动避撞辅助系统AEB使追尾碰撞伤害发生率分别降低了20%、45%[1],因此,紧急制动系统相关研究得到广泛关注。信度,而触发过晚无法有效避免碰撞事故发生。可见,AEB系统控制策略的研究对于自动避撞辅助系统具有重要意义。
目前紧急制动系统的控制策略大多基于车辆运动模型与车间距或时距控制,未考虑驾驶员对控制策略的影响,而从碰撞危险发生起始时刻至避撞完成,驾驶员操作都对控制策略起着重要影响。论文提出一种集成驾驶员特性的紧急制动系统分层控制策略,并进行离线仿真与台架试验验证,提高了避撞准确性与安全性,更符合驾驶员操作习惯。
2 紧急制动系统工作阶段与模式
当紧急工况发生时,紧急制动系统提前对制动系统进行准备并且对驾驶员提供可能发生碰撞的报警。如果驾驶员在紧急的情况下作出了反应,但是制动力不足,那么制动系统会提供剩余的制动力来达到最佳的目标制动力以避免碰撞。当危险程度升级,而驾驶员未采取制动时,系统进行自动紧急制动,避免碰撞发生。
因此,针对上述紧急制动过程,紧急制动系统分层控制策略包括以下几个阶段:
2.1 制动准备阶段
碰撞危险发生时,控制系统发送预建压信号,缩小制动片与制动盘之间的距离,弥补驾驶员触发紧急制动后紧急制动力的不足。
2.2 驾驶员报警阶段
当驾驶员跟车车距过小,安全距离报警将会触发。驾驶员未有干预,且危险程度仍在增加则启动预报警。危险情况继续恶化,将会进行点刹报警。
2.3 紧急制动辅助阶段
当驾驶员错误估计情况的严重程度或驾驶员制动力不足时,进入紧急制动辅助阶段。
功能触发的先决条件为:
(a)驾驶员处在危险的情况下且危险程度仍在加剧;
(b)駕驶员的制动力大小超过设定阈值,同时考虑减速度大小与制动系统压力限制。
2.4 自动紧急制动阶段
如果驾驶员未对前面的报警作出反应,并且情况的危险程度升级,则系统会进行自动紧急制动,系统可提供三种不同的制动模式:
(a)标准型部分自动紧急制动
自动部分制动触发较早,与点刹报警同时触发,给驾驶员争取更多的反应时间,即使驾驶员不作出反应,也将降低碰撞事故的危险程度。
(b)增强型部分自动紧急制动
当驾驶员对标准型部分自动紧急制动不作反应,或危险程度更高,系统会激活具有更高减速度的部分紧急制动来避免事故或者降低伤害。
(c)中速自动紧急制动
在汽车中等速度的时候激活,当系统计算出必须采用很大的、不舒服的减速度才可避免碰撞时,触发此功能,自动制动来尽可能地减小两车的相对速度。
3 控制器设计
3.1 控制系统架构
紧急制动系统分层控制架构如图1所示,其可分为上层决策控制器、中层车辆运动控制器、底层车辆制动稳定控制器。上层决策控制器基于雷达、摄像头等环境感知工具获取车间信息,继而判断是否发生紧急工况,紧急制动系统采取何种工作模式工作。中层车辆运动控制器依据车间信息、驾驶员输入与车辆运动状态,考虑制动系统能力、驾驶员接受程度的基础上,计算系统期望制动减速度。底层车辆制动稳定控制器控制车轮制动压力,在保证车辆稳定性的前提下完成车辆制动,避免车辆碰撞事故发生。
3.2 上层决策控制器
单一碰撞时间作为紧急制动系统触发条件存在误判等诸多风险,因此上层控制器采用模糊控制算法基于驾驶风格与碰撞时间进行紧急制动系统触发与工作模式判断。
模糊控制器输入量为驾驶员激进程度与碰撞时间,输出为车辆紧急危险度,同时引入车间安全距离作为驾驶员紧急程度限制。当碰撞时间降低时,驾驶员激进程度所占权重依次减小,当车间距离低于设定安全距离时,不再考虑驾驶风格。设定的安全距离与车间相对速度成比例关系,相对速度越小,安全距离相对增大。
其车辆紧急危险度归一化至[0,1]范围内,并定义其模糊集为[ZO,S,M,B,EB],即[零,小,中,大,巨大],输入输出采用三角形隶属度函数,设计的模糊推理规则如表1所示。
3.3 中层车辆运动控制器
基于确定的紧急制动系统工作模式,中层车辆运动控制器以避撞安全距离为控制目标计算避免碰撞发生的期望减速度。在紧急制动系统工作过程中,驾驶员介入制动产生制动减速度,则系统控制系统产生的目标制动减速度为。
(4)
基于纵向两车距离运动模型,将控制时刻至碰撞发生时刻进行控制周期划分,控制周期为T,控制周期内制动距离为
(5)
其中,为控制周期起始时刻本车相对前车速度,为期望本车相对前车制动减速度。
基于本车状态传感器与雷达、V2X等通信方式,本车车速、相对车速与相对加速度均可测量
(6)
其中,为相对加速度,为本车加速度,为前车加速度。
在很短控制周期内,假设前车制动减速度不变,则联合上式(4),(5)与(6), 即可得出目标制动减速度为。
3.4 底层车辆制动稳定控制器
底层车辆制动稳定控制器根据目标制动减速度,结合车辆动力学模型将制动力分配至各个车轮,在保证车辆纵向稳定性的前提下满足纵向制动减速度需求,同时控制耗能最小。
在需求制动力较大时,结合不同路面附着系数,以车轮最佳滑移率为控制目标,在前后轴实现制动力分配的同时,每个车轮提供最大制动力,以确保避撞。
ESC系统通过控制电机产生制动力,从而动态调整制动力矩。为确保制动过程中车辆横摆稳定性,各车轮制动力产生的横摆力矩Mz理想值趋近为零
(7)
其中,为各车轮纵向力,为轮距,为质心与前轮中心距离。
车轮是否打滑基于车轮滑移率判断。抱死时,车轮转速与车辆速度间存在着差值,滑移率即车轮滑转程度。滑移率为上述差值与车速的比值,公式为:
(8)
车轮制动力随滑移率增加而增加,高速路面上,当滑移率在10%~20%范围内时,制动力最大,低附路面上,此范围在4%~5%。超出此范围,车轮处于打滑状态,制动力降低且丧失转向能力。
4 离线仿真试验
4.1 CarSim-Matlab/Simulink联合仿真
在CarSim-Matlab/Simulink联合仿真环境下对紧急制动系统分层控制策略进行了验证。CarSim提供了包括车辆模型、毫米波雷达、场景、测试工况等环境,结合Matlab/Simulink中建立的控制策略,可实现紧急避撞制动系统虚拟测试环境,同时提供了动画与测试曲线数据。
测试工况采用AEB Inter Urban中的静止车辆追尾(Car-to-Car Rear stationary, CCRs)评分工况,前方目标车辆静止,后车高速追尾前车。设定如下:前车车辆静止,本车速度30-80km/h。
4.2 仿真结果
在设定仿真工况为本车速度45km/h,高附路面下的车间相对距离与制动减速度仿真结果如图4所示。制动减速度得益于电子制动助力器,其控制线性度较ESP液压控制高,制动减速度平稳,由于本车速度较低,制动减速度峰值小于10m/s2。如图2(a)所示。图2(b)中,黑点为紧急制动系统触发时刻,其触发距离为19.68m,车辆刹停时距离前车距离为1.82m。
5 实车试验
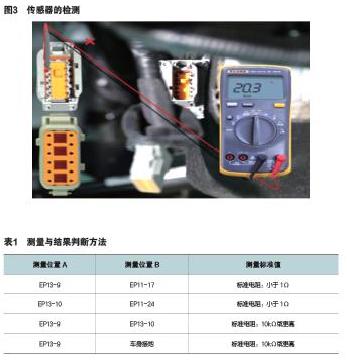
试验车采用SGMW公司生产的新宝骏系列,实时仿真機使用dSPACE公司的MircoAutoBox,采集各车身与毫米波雷达等传感器数据,如图3所示。
测试工况与仿真工况相同,在不同车速下,紧急制动系统触发距离与刹停距离如图4所示,触发距离随车速增加而增大,刹停距离在1.5m~1.7m与仿真工况接近,进一步验证了控制策略的有效性。
6 结论
针对紧急制动系统,提出一种结合避撞安全与车辆稳定性的紧急制动系统分层控制策略,并进行仿真与实车试验,提高了避撞准确性与安全性,结论如下:
(1)基于紧急制动系统工作阶段与模式,制定了紧急制动系统分层控制策略,分为上层决策控制器、中层车辆运动控制器、底层车辆制动稳定控制器。在低附路面紧急制动时保证了车辆稳定性,提高了制动效果,避撞安全性更佳。
(2)设计了由驾驶员激进程度与碰撞时间作为输入的模糊控制器,输出为车辆紧急危险度,优化了避撞触发时刻,避免了系统误触发。
(3)通过联合仿真与实车试验,验证了紧急制动系统分层控制策略的有效性,可有效避免碰撞发生。
受试验资源影响,实车试验未在低附路面展开,后续将展开低附路面的控制算法实车验证相关研究。
参考文献:
[1]Cicchino J B . Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates[J]. Accident Analysis & Prevention,2017,99(Pt A):142-152.
[2]裴晓飞,刘昭度,马国成,et al.Safe distance model and obstacle detection algorithms for a collision warning and collision avoidance system%汽车主动避撞系统的安全距离模型和目标检测算法[J].汽车安全与节能学报,2012,3(1):26-33.
[3]郑苏,段敏,陈天任.车辆主动避撞系统控制策略研究[J].辽宁工业大学学报:自然科学版,2020(1):26-30.
[4]Salehinia S,Ghaffari A,Khodayari A,et al. Modelling and controlling of car-following behavior in real traffic flow using ARMAX identification and Model Predictive Control[J]. International Journal of Automotive Technology,2016,17(3):535-547.
[5]侯德藻,刘刚,高峰等.新型汽车主动避撞安全距离模型[J]. 汽车工程,2005,27(2):186.
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
科学家(2016年3期)2016-12-30
科学与财富(2016年26期)2016-12-01
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年7期)2016-05-19
计算技术与自动化(2015年4期)2016-03-25
物联网技术(2015年4期)2015-04-27
