自动增益控制在磁力仪中的应用
2020-07-23 00:45陈恩宗发保余恺
声学与电子工程 2020年2期
陈恩 宗发保 余恺
(第七一五研究所,杭州,310023)
氦光泵磁力仪基于氦原子在外磁场中发生塞曼分裂为基础,同时利用光泵作用和磁共振现象研制而成,将对磁场的测量转换成对频率的测量,其已被广泛地用于磁法勘探、航空反潜等领域[1]。氦光泵磁力仪为跟踪式磁力仪,原理框图见图 1。通过检测光泵探头的磁共振信号来实现对当前磁场值的测量,氦光泵磁力仪的磁共振信号幅度与光轴和磁场方向的夹角大小有关,所以单光系的氦光泵磁力仪会存在“盲区”,即当光轴与磁场方向的夹角大于一定值时,磁力仪会由于信号幅度过小导致失锁。尤其是在中低纬度地区的航磁测量系统中,当飞行器转弯时,由于飞行器的倾斜导致光轴和磁场方向的夹角变化,氦光泵磁力仪失锁,导致无法完成测量。本文提出采用 AGC电路,以适应大动态范围的磁共振信号变化[2]。

图1 氦光泵磁力仪原理框图
1 问题成因分析
氦吸收室在高频激励的作用下,被激发而发出一定波长的弱光,这时一部分原来没有磁性的氦原子就变成带磁性的亚稳态原子。亚稳态的氦原子吸收来自氦灯发出的波长为1.08 μm的D线后,沿外磁场方向排列,叫做“光泵作用”[3]。氦光泵磁力仪磁共振信号幅度为[4]:



由式(2)可知,光泵磁共振信号幅度与4cosθ成正比。当θ为 0°时(即光轴与磁场方向平行),信号幅度最大。当单光系磁力仪垂直放置时,其夹角θ见图2。

图2 磁力仪共振信号与纬度的关系
第二因子可写为:

式中,x为相对失调量,a为饱和系数。表示共振曲线的形状[2]。
2 电路设计
本文设计的氦光泵磁力仪原理框图见图 3,在选频放大前加入一级AGC,减小单光系氦光泵磁力仪的盲区。本文采用运放和场效应管构成的 AGC电路,通过控制场效应管的RDS的大小来控制运放的放大倍数[5]。其仿真电路图见图 4。输入输出关系曲线见图5。
3 仿真结果及分析
仿真结果见表 1,假设光泵探头光轴与磁场方向平行时的共振信号经过放大后最大值为1 V。表1中无自动增益的共振信号值为理论计算值,有自动增益的共振信号值为仿真值。由表1数据可知,加了AGC后,光轴与磁场方向的夹角在0°~70°的范围内,共振信号大于 0.398 V,且共振信号幅度基本稳定在0.9 V左右。在未加增益控制时,共振信号随夹角增大逐渐减小,70°时,只有0.014 V,且变化较大。

图3 本文氦光泵磁力仪原理框图
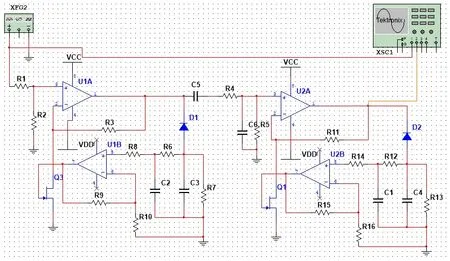
图4 AGC电路仿真原理图

图5 AGC电路输入与输出曲线图

表1 有无自动增益的共振信号幅度对比
以中国船舶集团公司第七一五研究所研制的RS-GB10航空磁力仪为例,共振信号经过放大到5 V,送至相敏检波器控制压控振荡器输出,当信号小至1 V时,磁力仪失锁,处于不跟踪状态。即当夹角为48°时,磁力仪处于失锁状态。当加入AGC电路后,通过仿真可知,当夹角为 73°时,磁力仪处于失锁状态。因此,增加AGC电路后,RS-GB10航空磁力仪的“盲区”减小了约30°。
4 电路实现
根据仿真电路设计了一个 AGC电路,并将其串联在 RS-GB10航空磁力仪的光泵探头和选频放大电路之间。经过调试后,选频放大输出的测试结果见表2。从表2可知,增加AGC电路后的实测值与仿真结果一致。
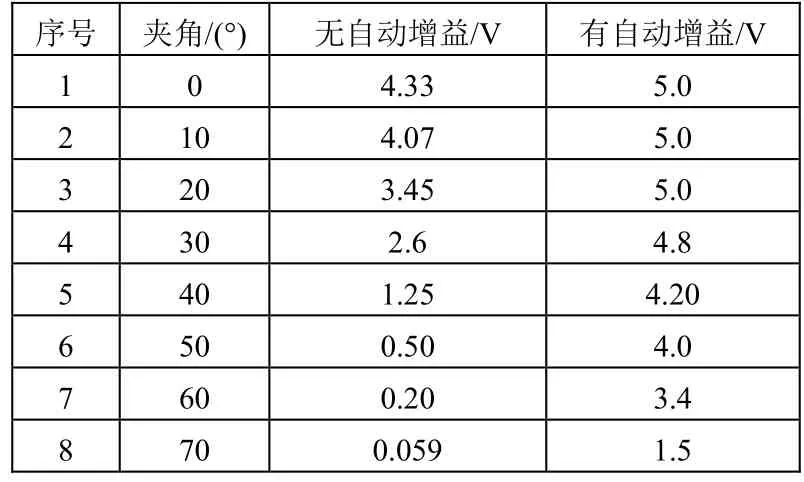
表2 有无自动增益的共振信号幅度对比
5 结论
本文针对单光系氦光泵磁力仪存在“盲区”的问题,提出 AGC控制电路用以适应大动态范围的磁共振信号变化即保持放大器输出信号幅度的稳定,可将RS-GB10航空磁力仪“盲区”减小约30°,避免了因飞行器姿态大幅变化导致磁力仪不工作的情况,对中低纬度地区航空磁法测量具有重要的意义。
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
摄影之友(2020年12期)2020-12-23
语数外学习·高中版上旬(2020年8期)2020-09-10
铁道通信信号(2018年12期)2019-01-31
电脑爱好者(2018年17期)2018-11-05
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
中学生数理化·高一版(2018年5期)2018-06-04
资源再生(2017年4期)2017-06-15
中国卫生(2015年5期)2015-11-08