MIMO雷达中OFD-LFM-PC波形空时优化设计
2020-07-22 01:52董延焘赵志欣
雷达科学与技术 2020年3期
洪 升, 董延焘, 艾 煜, 赵志欣
(南昌大学信息工程学院, 江西南昌 330031)
0 引言
MIMO雷达是一种采用多天线发射正交波形信号集,并利用多接收天线进行特定匹配滤波处理的新型雷达体制[1-2]。正交波形是获得MIMO雷达分集增益的重要前提。频分正交是实现波形正交的常用技术。频分正交技术的典型应用是正交频分线性调频(Orthogonal Frequency Division-Linear Frequency Modulation, OFD-LFM)波形[3]。为了确保波形正交性,OFD-LFM波形规定频分正交条件为载频间隔等于脉宽时间倒数的整数倍。通常载波间隔越大,波形互相关越小,但是由于实际可用频谱的限制,OFD-LFM在每个载波上的信号频谱会存在重叠(并不影响正交性);此时,OFD-LFM波形空域合成信号的自相关函数出现和主瓣同高的离散栅瓣,会严重恶化雷达目标检测。
为解决该问题,已有的研究对OFD-LFM波形结构进行了改进和优化。文献[4]给出了使得互相关最小的载频间隔。文献[5]提出各载波调制非均匀带宽的方法,有效地消除了离散旁瓣。文献[6]提出在OFD-LFM波形中采用非均匀载频间隔的方法,使其空域合成信号在保证发射功率方向图近似全向的情况下尽可能降低自相关旁瓣水平。文献[7]表明联合优化载波频率编码序列和载波初始相位可以降低OFD-LFM波形栅瓣,但无法消除栅瓣。已有的方法虽然能够消除或降低波形栅瓣,但也存在一些不足之处。非均匀载频间隔的方法破坏了频分正交的条件,波形正交性损失较大。非均匀载波带宽的方法会破坏OFD-LFM波形的频谱对称性,虽然能消除栅瓣,但总体旁瓣水平较高。
针对已有方法的不足,本文提出了一种全新的解决方法,即在OFD-LFM波形的载波上调制相位编码序列,以消除空域合成信号的自相关栅瓣。将改进的波形结构定义为正交频分线性调频-相位编码(Orthogonal Frequency Division-Linear Frequency Modulation-Phase Coded, OFD-LFM-PC)波形。该波形结构保证了正交频分条件以及频谱的对称性。而将相位编码序列调制在OFD-LFM波形上,在消除栅瓣的同时,既保留了调频信号的高分辨率和高多普勒容限等优点,又兼备相位编码的良好相关特性和抗干扰、低截获特性。
在本文中,首先通过分析OFD-LFM-PC波形的空时特性,揭示了该波形消除OFD-LFM波形栅瓣的原因。然后,对OFD-LFM-PC波形的载波频率编码序列和相位编码矩阵进行联合优化,进一步降低空域合成信号的整体旁瓣水平,并且保证发射功率方向图的近似全向。最后,建立了双变量的非线性优化模型,并提出一种嵌套遗传算法的粒子群算法来求解。仿真结果表明,所优化设计的波形具备良好的时域特性和空域特性,为MIMO雷达中弱小目标的检测提供了有效保证。
1 OFD-LFM-PC波形信号空时特性分析及优化建模
1.1 波形信号模型
假设MIMO雷达中发射阵列为包含M个天线的均匀线阵,阵元间距d=λ/2,λ表示发射波长。将相位编码序列调制在OFD-LFM波形的不同载波上,构造出OFD-LFM-PC波形,其波形结构如图1所示。
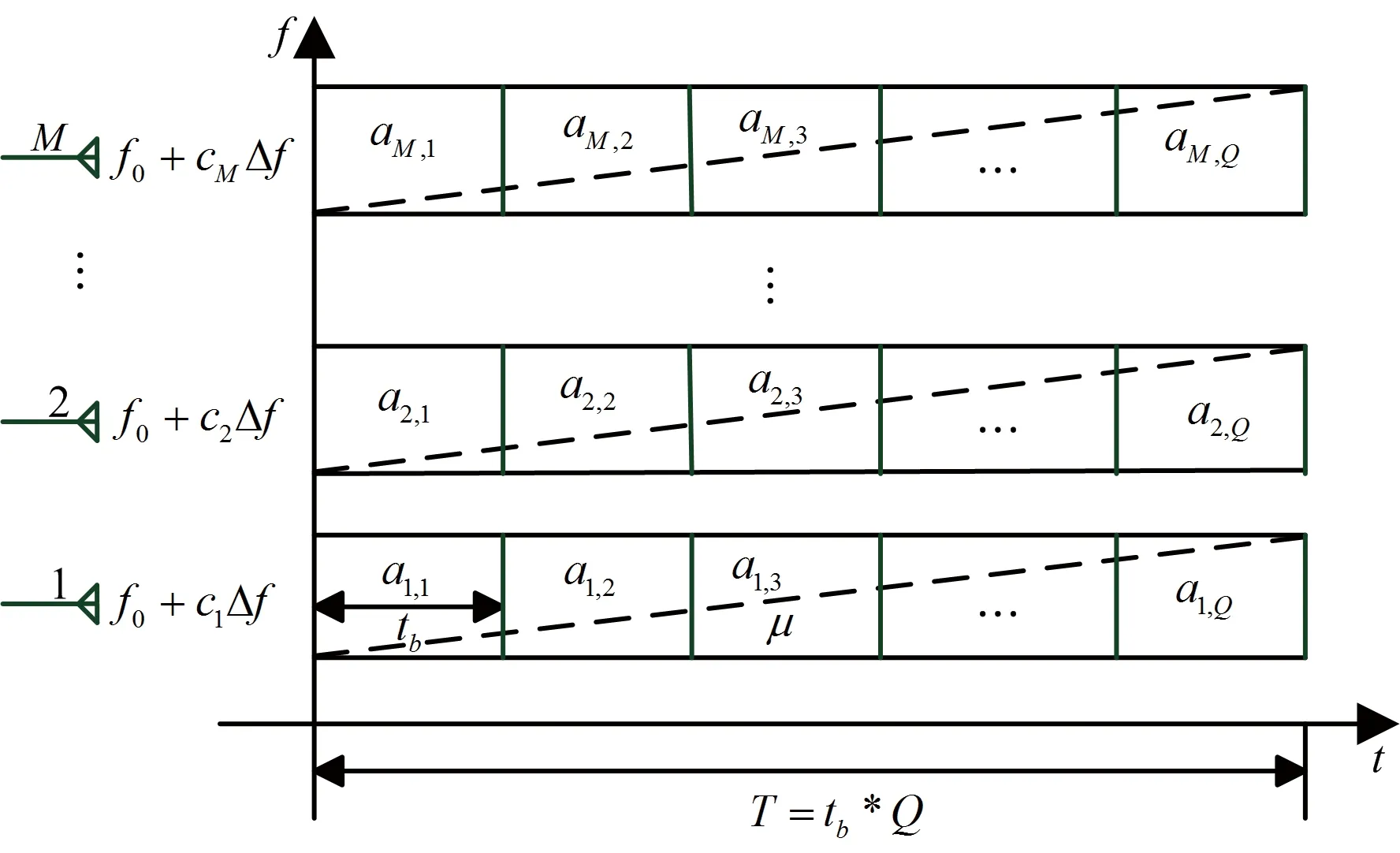
图1 OFD-LFM-PC波形结构示意图
在图1中,第m个天线上发射的波形信号为

ej2π(f0+cmΔf)tejπμt2
(1)
其中码元波形函数为
(2)
f0为中心载频,载频间隔Δf=n/T(n为正整数),调频斜率为μ。每个载波脉冲上调制码元宽度为tb,编码长度为Q的相位编码序列,则脉冲时间宽度T=tb·Q。定义cm=m-(M+1)/2,(m=1,2,…,M),则c0=[c1,c2,…,cM]T表示顺序载波频率编码序列。am,q表示第m个天线(或载波)上调制的相位编码序列的第q个码元,可表示为am,q=ejφm,q,其中φm,q表示相应的调制相位。若φm,q为零相位,则调制的相位编码序列为全1序列,此时式(1)所表示的OFD-LFM-PC波形退化为传统的OFD-LFM波形。本文考虑离散相位编码的情况,则调制在M个天线上的长度为Q的相位编码序列可以写成如下矩阵形式:
(3)
Φ决定了调制在OFD-LFM-PC上的相位编码序列集,称其为相位编码矩阵。Φ的选择对最终OFD-LFM-PC波形的性质起着重要作用。
若Bs为单个载波上混合线性调频和相位编码的调制带宽,则OFD-LFM-PC空域合成信号的总带宽为B=Bs+(M-1)·Δf。信号处理结构采用接收波束形成后进行空时匹配滤波,则脉冲压缩结果可等效为波形空域合成信号的自相关函数。不考虑信号在传播中的衰减,位于远场方向θ处目标在t时刻被照射的空域合成信号为
(4)
式中,at(θ)=[ej2πc1dsinθ/λ,ej2πc2dsinθ/λ,…,ej2πcMdsinθ/λ]T表示选取阵列中心为参考点的发射阵列导向矢量,s(t)=[s1(t),s2(t),…,sM(t)]T表示发射波形集矢量。
1.2 OFD-LFM-PC波形时域分析
根据式(4),波形在θ方向空域合成信号的自相关函数可以表示为

(5)


(6)

(7)
其加权函数定义为Wv(τ),可写为
(8)
图2给出了OFD-LFM波形和OFD-LFM-PC波形空域合成信号的自相关函数。图中OFD-LFM-PC波形所调制的相位编码序列为M个不同初始值的混沌序列所产生的相位编码序列。由图2可知,OFD-LFM波形存在周期性的距离栅瓣,而OFD-LFM-PC波形消除了周期性出现的距离栅瓣,但整体旁瓣却仍然较高。因此,有必要对OFD-LFM-PC波形进一步优化以降低其空域合成信号的自相关旁瓣水平。
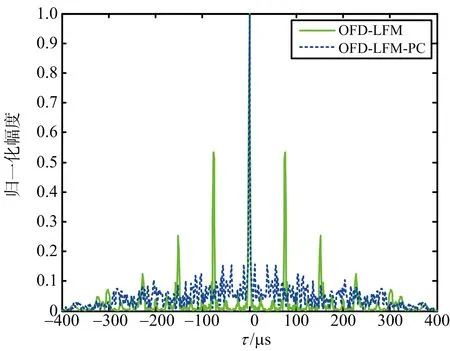
图2 波形自相关函数对比
1.3 OFD-LFM-PC波形空域分析
根据式(4)可得合成信号在总脉冲宽度T内的平均功率为

(9)
式中:(·)*,(·)H和(·)T分别表示共轭、共轭转置以及转置;R表示发射波形信号的协方差矩阵,可写为
(10)
pE(θ)反映雷达在空间θ处辐射的平均电磁能量情况,称为发射功率方向图。由式(9)和式(10)可知,当发射波形严格正交时,R是一个M×M维单位矩阵IM,发射功率方向图全向。对于OFD-LFM波形来说,只要T·Δf为整数,频分正交条件得到满足,发射功率方向图pE(θ)便为全向。在OFD-LFM-PC波形中,T·Δf仍然为整数,但是各天线上调制的相位编码序列会一定程度上破坏波形的正交性,使得R不再是一个单位阵,发射功率方向图出现全向波动。图3分别给出了OFD-LFM和OFD-LFM-PC波形的发射功率方向图(相位编码序列同图2)。显然,OFD-LFM-PC波形的发射功率方向图在全向方向图基础上有所波动。因此,对OFD-LFM-PC波形的进一步优化需要保证发射功率方向图逼近全向。
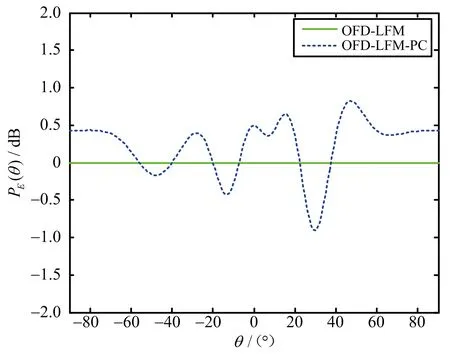
图3 发射功率方向图对比
1.4 波形优化建模
由以上分析可知,对于OFD-LFM-PC波形,其时域特性要求空域合成信号的自相关旁瓣较低以提高对弱小目标的探测能力;其空域特性要求发射功率方向图全向以实现对全空间范围目标的搜索探测。分析表明,影响OFD-LFM-PC波形时域特性和空域特性的一个重要因素是所调制的相位编码序列集。此外,根据已有文献,调整载波频率编码序列可降低OFD-LFM波形空域合成信号的自相关栅瓣。因此,不同于已有方法,本文在OFD-LFM-PC波形基础上固定载波信号带宽和载频间隔,通过改变载波频率编码序列增加波形的多样性来降低并消除栅瓣。这样既可尽量保全波形结构的频谱对称性及发射功率方向图的全向性,又可减少硬件设计的复杂性及接收信号处理时间。
为此,本文以发射波形载波频率编码序列和相位编码矩阵作为优化变量,将OFD-LFM-PC波形的空域合成信号自相关函数峰值旁瓣电平以及发射功率方向图对全向发射方向图的逼近程度加权构造为一个代价函数,建立如下优化模型:
s.t.c∈Perms{[c1,c2,…,cM]}
(11)
m=1,2,…,M,q=1,2,…,Q
式中,‖·‖F表示Frobenous范数,c表示载波频率编码序列,Perms(·)表示对载波频率编码序列[c1,c2,…,cM]的全排列。式中用发射波形相关矩阵R与单位矩阵IM的逼近程度来等效代替发射功率方向图与全向发射功率方向图的逼近程度。ω表示代价函数中自相关代价函数和方向图代价函数的权重。值得注意的是,式(11)中φm,q选用五相码,仅作举例,采用其他相位数码,本文算法依然适用。
该模型表示一个双变量的非线性优化问题。作为优化模型中的两个优化变量,载波频率编码序列c和相位编码矩阵Φ的取值共同决定了代价函数的取值。然而,它们的取值区间及数值维度是不同的,c∈CM×1的取值区间是排列组合集合,而Φ∈CM×Q中元素的取值属于一个离散相位编码集合。因此,载波频率编码序列c的优化是一个排列组合的优化问题,而相位编码矩阵Φ的优化问题是一个高维离散取值矩阵优化问题,这两个问题需要不同的方法来解决。
2 优化算法设计
2.1 载波频率编码序列优化
本文中的载波频率编码序列优化是一个排列组合优化问题,可归类为经典的旅行商问题,该问题通常可采用遗传算法来解决[9]。为此,本文通过遗传算法优化载波频率编码序列。针对本文所研究的问题,遗传算法在编解码、交叉及变异等方面具有一定的特殊性。首先,需要对优化的载波频率编码序列进行编码和解码。本文的载波频率编码和解码方式如式(12)所示:
(12)
其次,在优化过程中,交叉操作之前要对选中交叉的两组基因进行判断,判断能否进行交叉。最后,变异操作只能将选中的基因序列上随机两个位置进行交换而实现变异。
2.2 相位编码矩阵优化
本文中的相位编码矩阵优化问题是一个高维离散取值矩阵优化问题,可采用统计优化算法进行优化。为了将载波频率编码序列优化与相位编码矩阵优化区分开来,这里选择粒子群算法[10]优化相位编码矩阵。相对于其他的统计优化方法,粒子群算法速度快、参数设计较少、效率高。然而,经典粒子群算法一般用于对连续变量的优化。为实现对相位编码矩阵中离散相位的优化,本文对粒子群算法进行改进,以适合本文中的相位编码优化问题。经典粒子群算法的速度和位置更新公式为
(13)

(14)
1) 通过式(14)中的速度公式计算出速度之后,将速度矩阵中的随机位置上的值置零。
2) 得到的速度矩阵中所有元素都属于{2π/5,4π/5,6π/5,8π/5,0,-2π/5,-4π/5,-6π/5, -8π/5,0}集合。将速度矩阵中的所有非零速度值都变成最小步进值,零值速度不变。即按照下式的映射将速度矩阵中的所有元素进行重新赋值:
(15)
上述修改后的粒子群算法没有考虑粒子群中粒子的历史最优位置和原始速度,只通过全局最优位置计算粒子运行的方向和速度。其主要原因是为了满足离散相位优化;同时,若优化过程中考虑粒子历史最优位置和原始速度会造成该粒子前进方向出现博弈的过程,该博弈过程对优化方向存在一定的干扰而降低粒子群算法的收敛速度。
2.3 载波频率编码序列和相位编码矩阵联合优化
本文提出一种嵌套遗传算法的粒子群算法,将优化变量{c,Φ}作为算法中的一个粒子。与已有问题不同的是,该粒子包含基因序列和位置双重属性。被搜索的最优粒子需要同时具备最优基因序列及最优位置。所提算法的搜索过程如图4所示。
图4中载波频率编码序列c表示某个粒子的基因序列,相位编码矩阵Φ表示某个粒子的位置。在该优化过程中,采用改进的粒子群算法优化粒子的位置Φ,并在每一次迭代中嵌套遗传算法来优化粒子的基因序列c。
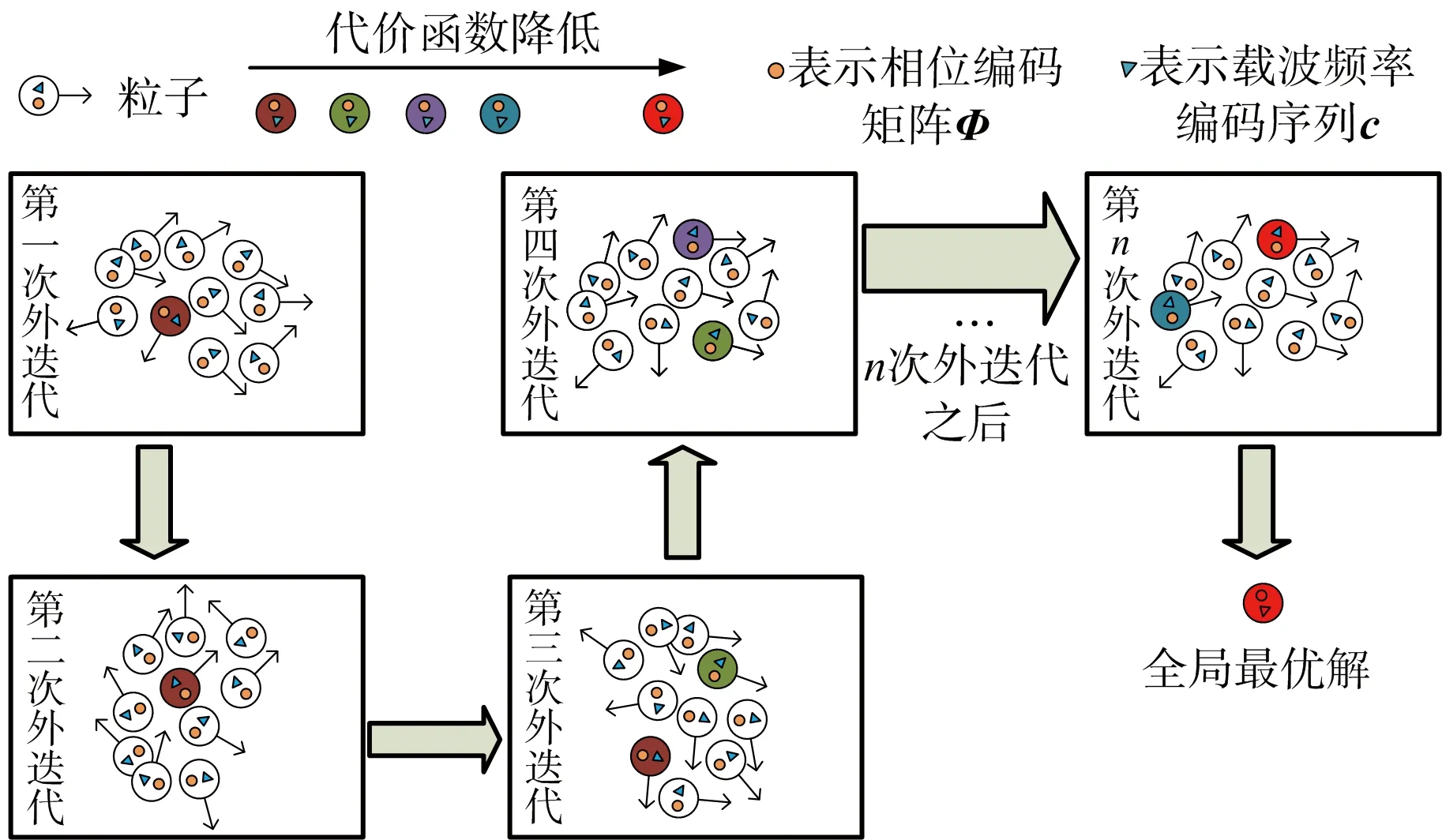
图4 嵌套遗传算法的粒子群算法示意图
联合优化具体步骤如下:
1) 初始化粒子种群。通过混沌映射产生50个随机位置(随机相位编码矩阵Φ)和50个随机基因序列(载波频率编码c)赋给50个粒子,构成一个初始化粒子种群{c,Φ}。
2) 遗传算法优化基因序列。针对步骤1)中的每个粒子,随机产生另外19个不同的基因序列(载波频率编码序列c),对这20个不同的基因序列进行20代的交叉和变异,选择20代交叉变异后的最优基因序列(载波频率编码序列c),于是每个粒子在位置Φ处寻找到一个较优的基因序列c。通过步骤2)得到的50个双重属性的粒子种群,这50个粒子的位置是随机产生的,但是基因序列是进行了一定优化的。
3) 保留当前最优粒子。在步骤2)产生的种群中选择并保留最优粒子,即将粒子基因和位置带入代价函数,以求取具备最优基因序列和位置组合的最优粒子{cg,Φg}k,k表示第k次迭代。
4) 计算种群粒子速度并更新种群粒子位置。用步骤3)中选择的最优粒子通过式(14)计算并更新各粒子速度和位置得到{cg,Φ}k+1。
5) 更新并保留最优粒子。步骤4)之后,种群中的每个粒子位置都得到了更新,即种群的位置属性都得到了更新。在更新的种群中寻找最优粒子{cg,Φg}k+1,并保留。
6) 局部寻优结束判断。判断种群中50个粒子的速度矩阵中平均零值个数是否超过阈值。若超过阈值则意味着大部分粒子都达到局部最优位置,此时跳出本次粒子群进化,并跳至步骤7),否则继续执行步骤2)~6)。
7) 全局寻优结束判断。将局部寻优的最优粒子(对应着最优相位编码矩阵和载波频率编码序列组合)作为下一代种群中的一个粒子,并重复步骤1)~6)。达到迭代次数阈值(如50代)后停止迭代。
最终算法的流程图如图5所示。
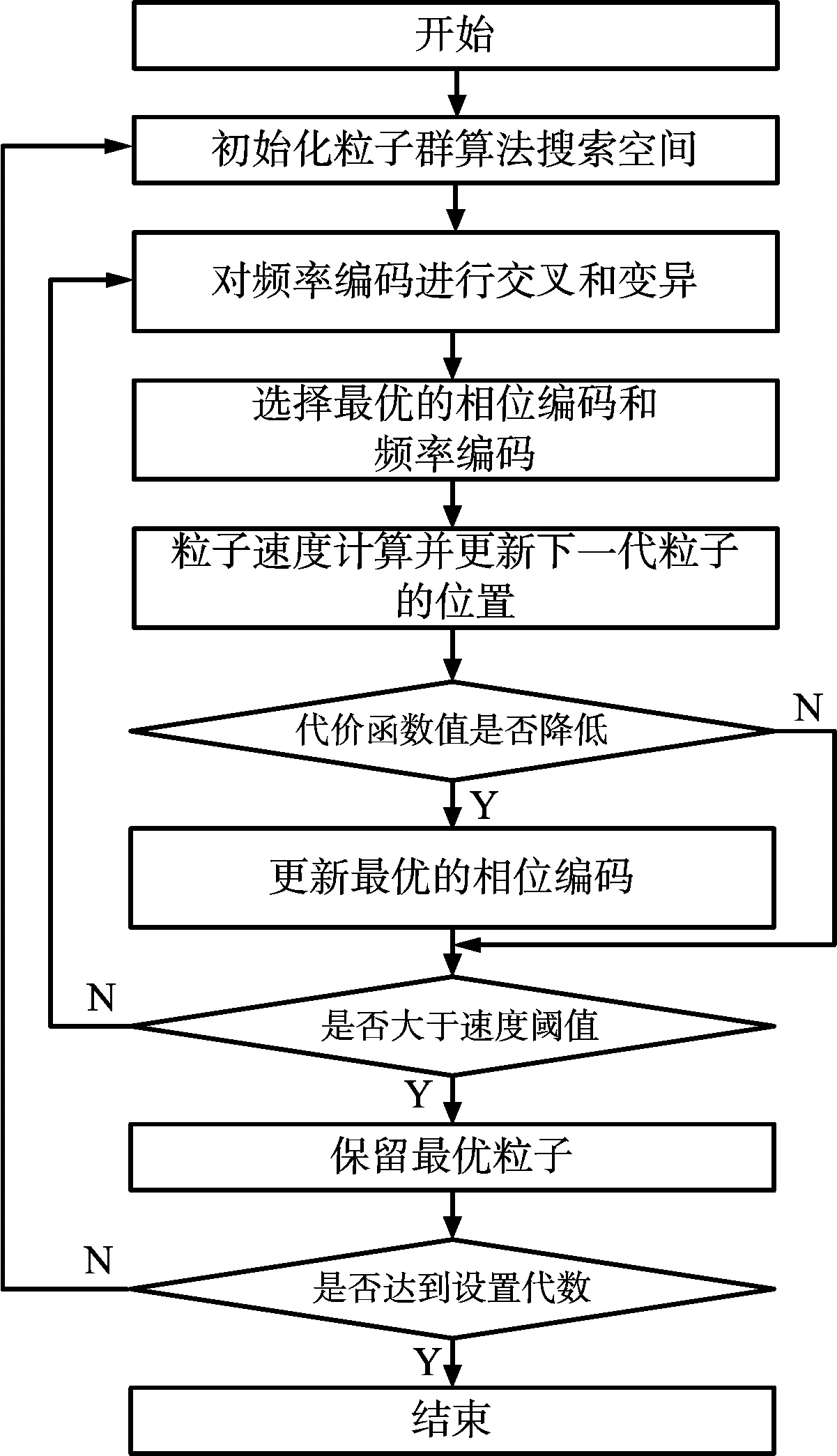
图5 联合优化算法流程图
从图5可以看出,该嵌套遗传算法的粒子群算法包含内外两层迭代。内部迭代实际上为局部寻优,主要包含优化步骤中的2)~6),该过程主要是在局部搜索空间对载波频率编码序列和相位编码矩阵进行联合优化。外部迭代实际上为全局寻优,包含优化步骤中的1)~7),该过程主要是在全局搜索空间对载波频率编码序列和相位编码矩阵进行联合优化。本文中算法主要是基于统计优化算法的一种寻优过程,由式(11)及优化步骤可知所提算法主要的时间和空间消耗来自于对代价函数的计算。由于计算机硬件的不同,代码执行情况会有所差异,因此本文将代价函数的计算量作为时间复杂度和空间复杂度的基础描述指标。对时间复杂度来说:假设代价函数计算一次的时间复杂度记为Ot(1),则第2)步的时间复杂度为Ot(2 000),第3)~6)步的时间复杂度为Ot(50),内迭代的迭代次数和速度矩阵中的“零”值个数有关系,根据寻优结果的不同迭代的次数也不相同。假设迭代n次跳出内迭代,则内迭代的时间复杂度为Ot(2 050n),外层迭代中除去2)~6)步中的代价函数计算,第1)步计算的时间复杂度为Ot(50),假设外层迭代循环m次,则整个循环的时间复杂度记为Ot(2 050n×m+50×m)。对空间复杂度来说:空间复杂度是对算法在运行过程中临时占用存储空间大小的一个量度,因此假设该算法中每保存一个粒子所需要的空间复杂度为Os(1),则第2)步中储存的粒子最多,空间复杂度为Os(50×40),将储存最多粒子时刻的空间复杂度作为该算法的空间复杂度。
3 算法仿真
为验证本文算法的有效性,进行如下仿真实验。在以下仿真中,假定发射阵元个数M=7,脉冲宽度T=400 μs,相位编码长度Q=63,载频间隔Δf=40 kHz,总带宽B=500 kHz,单载频带宽Bs=260 kHz,调频斜率μ=5.15×108。在优化求解过程中选择权重系数ω=0.5。基于所设定的仿真参数,粒子速度矩阵为7×63的矩阵,总共包含441个元素。本文假定50个粒子对应的速度矩阵中的平均零值个数超过440个时,认为局部寻优已经达到最优。本文进行了50次全局优化,以实现全局范围内的最优粒子搜索。最终,OFD-LFM-PC波形的优化仿真结果如图6所示。
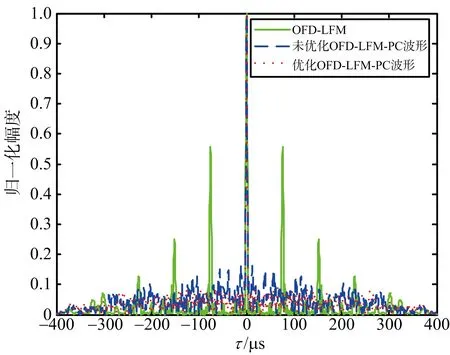
(a) 自相关对比
图6(a)给出了50次外迭代结束之后OFD-LFM-PC波形空域合成信号的自相关函数。由图可知,OFD-LFM波形空域合成信号的自相关函数存在较高的栅瓣,而OFD-LFM-PC波形可以消除栅瓣;并且优化之后的OFD-LFM-PC波形相对于未优化的OFD-LFM-PC波形合成信号自相关函数的旁瓣得到了较大程度的降低。图6(b)给出了50次外迭代结束之后OFD-LFM-PC波形的空域发射功率方向图。显然相对于未优化的情况,优化后的OFD-LFM-PC波形的功率方向图波动几乎可以忽略不计,逼近全向。图6(c)给出了代价函数随着迭代次数的变化曲线。图中,代价函数随着迭代次数的增加逐步下降,表明采用多次外迭代扩大全局搜索范围是有效的。扩大搜索范围是因为粒子群算法作为一种统计优化算法不能保证算法的快速收敛度,但是本文中改进的粒子群算法继承了一部分传统粒子群算法线性搜索的方向性,相比其他的统计优化算法收敛速度更快、参数设计较少、效率更高。
为了更清楚地展现OFD-LFM-PC波形的优化效果,将优化波形空域合成信号自相关函数峰值旁瓣电平(Peak Sidelobe Level, PSL)和方向图波动幅度(最大峰值和最小峰值之差)归纳在表1中。

表1 PSL和方向图波动幅度对比
表1中,初始化OFD-LFM-PC波形空域合成信号自相关函数PSL为-16.87 dB,经过一次外迭代即局部搜索之后,PSL降低了约2 dB;经过50次外迭代即全局搜索之后,PSL降低了约5 dB。而方向图波动幅度在第一次外迭代之后,相比未优化的发射功率方向图,波动幅度降低了0.320 3 dB;经过50次迭代之后,相比未优化的发射功率方向图,波动幅度降低了1.570 6 dB。最终的方向图波动幅度降低为0.158 5 dB,即在50次迭代之后,其方向图波动幅度可以忽略不计,方向图近似全向。
为进一步体现本文所提波形及优化方法的优异性,将所优化得到的波形与文献[5]、文献[6]所提出的波形在空域合成信号自相关函数以及发射方向图两方面进行比较,比较结果如图7所示。

(a) 自相关函数对比
图7给出了本文方法和文献[5]、文献[6]在相同参数下的波形空域合成信号的自相关函数和发射功率方向图。从图7(a)可以看出,三种方法都消除了传统OFD-LFM波形空域合成信号自相关栅瓣。从图7(b)可以看出,本文方法和文献[6]的发射功率方向图基本保持全向,文献[5]出现较大的发射功率方向图抖动。文献[5]中的方法虽然消除了波形空域合成信号的自相关栅瓣,但是相对于本文所提算法,自相关近区旁瓣水平较高并且发射功率方向图抖动较大。文献[6]中的方法在保证发射功率方向图全向性的同时消除了空域合成信号的自相关栅瓣,但是通过优化之后的自相关旁瓣整体水平相比本文中的方法依然较高。显然本文所提方法,使得优化后波形的自相关旁瓣水平较文献[5]和文献[6]更低,并且基本保证了波形发射功率方向图的全向性。
4 结束语
为消除OFD-LFM波形空域合成信号的自相关栅瓣,本文对OFD-LFM波形结构进行改进,构建了全新的OFD-LFM-PC波形。通过对OFD-LFM-PC波形空时特性分析,给出了OFD-LFM-PC空域合成信号不存在自相关栅瓣的原因,并指出有必要对OFD-LFM-PC波形进一步优化以降低空域合成信号自相关旁瓣并保证方向图全向。为此,本文建立了相应的空时优化模型,提出了一种嵌套遗传算法的粒子群算法进行求解。仿真结果验证了本文所提波形及方法的优越性。
猜你喜欢
中国空间科学技术(2021年1期)2021-03-16
军民两用技术与产品(2021年10期)2021-03-16
环球时报(2021-02-01)2021-02-01
民用飞机设计与研究(2020年4期)2021-01-21
科技视界(2020年8期)2020-05-18
电机与控制学报(2018年9期)2018-05-14
无线互联科技(2017年24期)2018-01-22
中国管理信息化(2017年18期)2018-01-04
移动通信(2017年11期)2017-06-20
物联网技术(2017年2期)2017-03-15