对STAP技术的移频灵巧噪声干扰研究
2020-07-22 01:51秦兆锐董春曦
雷达科学与技术 2020年3期
秦兆锐, 董春曦
(1. 西安电子科技大学电子工程学院, 陕西西安 710071; 2. 电子信息系统复杂电磁环境效应国家重点实验室, 河南洛阳 471003)
0 引言
空时自适应处理(STAP)的概念是由Brennan和Reed于1973年首次提出的,该技术可实现对机载雷达强地杂波与干扰的有效抑制[1-2],显著改善机载雷达对地面运动目标的检测性能。此技术一经提出,便引起了专家学者们的广泛关注。与此同时,作为雷达对抗方,积极开展对空时自适应处理技术的干扰研究就显得尤为重要,对维护国家领土安全具有重大军事意义。
目前,国内外公开发表的针对STAP的干扰研究十分有限,对STAP干扰技术的研究兴趣主要集中在多普勒维干扰。文献[3]提出了基于阶梯波移频的假目标干扰方法,利用距离假目标构造非均匀环境,但生成的假目标数量较少。文献[4]和文献[5]虽然可以产生数量更多的时域假目标,但在相应干扰条件下,STAP处理器的改善因子下降程度有限。文献[6]研究了频谱调制的欺骗干扰技术,形成的多普勒欺骗假目标可以影响目标检测,但却呈现一定的规律性。
本文针对以上问题,提出了一种移频灵巧噪声干扰方法,并对其影响STAP系统对目标检测的干扰作用机理进行了合理的解释。该方法将移频调制与周期方波卷积[7]两种方法相结合,形成了基于移频的周期方波卷积干扰方法,生成的假目标群在真实目标附近密集分布,假目标数量及位置可人为控制,且幅度随机起伏。
1 STAP基本原理
机载雷达系统处于正侧视工作状态(阵列与航向夹角为零),其阵列天线几何模型如图1所示。假设雷达平台沿y轴方向匀速直线飞行,速度为v,并定义y轴方向为零方位角。雷达天线采用N个阵元组成的均匀线阵,各阵元等间隔放置,间距为d,并设d=λ/2(λ为工作波长)。地面散射点P为一个基本杂波单元。H为载机平台高度,R为载机平台到P点的斜距,θ为方位角,φ为仰角,ψ为锥角,满足cosψ=cosθcosφ的数量关系。
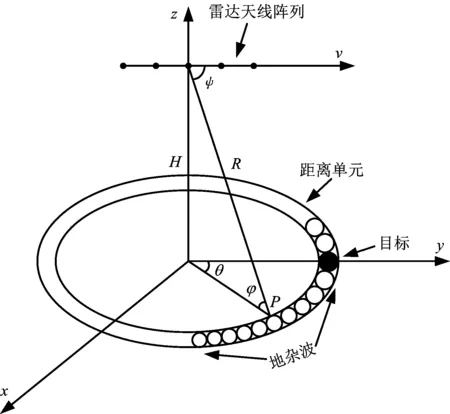
图1 机载雷达阵列天线几何模型
STAP处理器是一个空时二维滤波器,按距离门处理回波信号。对于每一个距离门,空间采样数据来源于N个阵元,时间采样数据来源于一个CPI内的M个脉冲,在一个PRI内进行L次采样。来自N个阵元,M个脉冲,L个距离单元的回波数据形成了一个N×M×L的三维雷达数据立方体,如图2所示。

图2 雷达数据立方体
N×M维矩阵Xl表示感兴趣的距离单元的空时快拍数据:
(1)
式中,xl(n,m),n=1,2,…,N,m=1,2,…,M表示在第l个距离单元中,来自第n个天线单元第m个脉冲的空时二维采样数据[8]。
为便于后续分析,将Xl改写成MN×1维向量形式:
(2)

H0和H1分别表示目标不存在和目标存在的两种假设,感兴趣的距离单元的空时快拍数据可以写为如下形式:
(3)

(4)
考虑Capon估计器,最大化SINR的权矢量满足如下带约束的优化问题[9]:
(5)
求解式(5),可得到如下空时二维最优自适应权矢量:
wopt=μR-1S
(6)
式中,μ=1/(SHR-1S),S为MN维期望信号的空时导向矢量。
S=S(ωs,ωt)=St⊗Ss
(7)
(8)
(9)
(10)
(11)
式中,Ss为空间导向矢量,St为时间导向矢量,ωs为归一化的空间角频率,ωt为归一化的时间角频率,⊗表示克罗内克积。
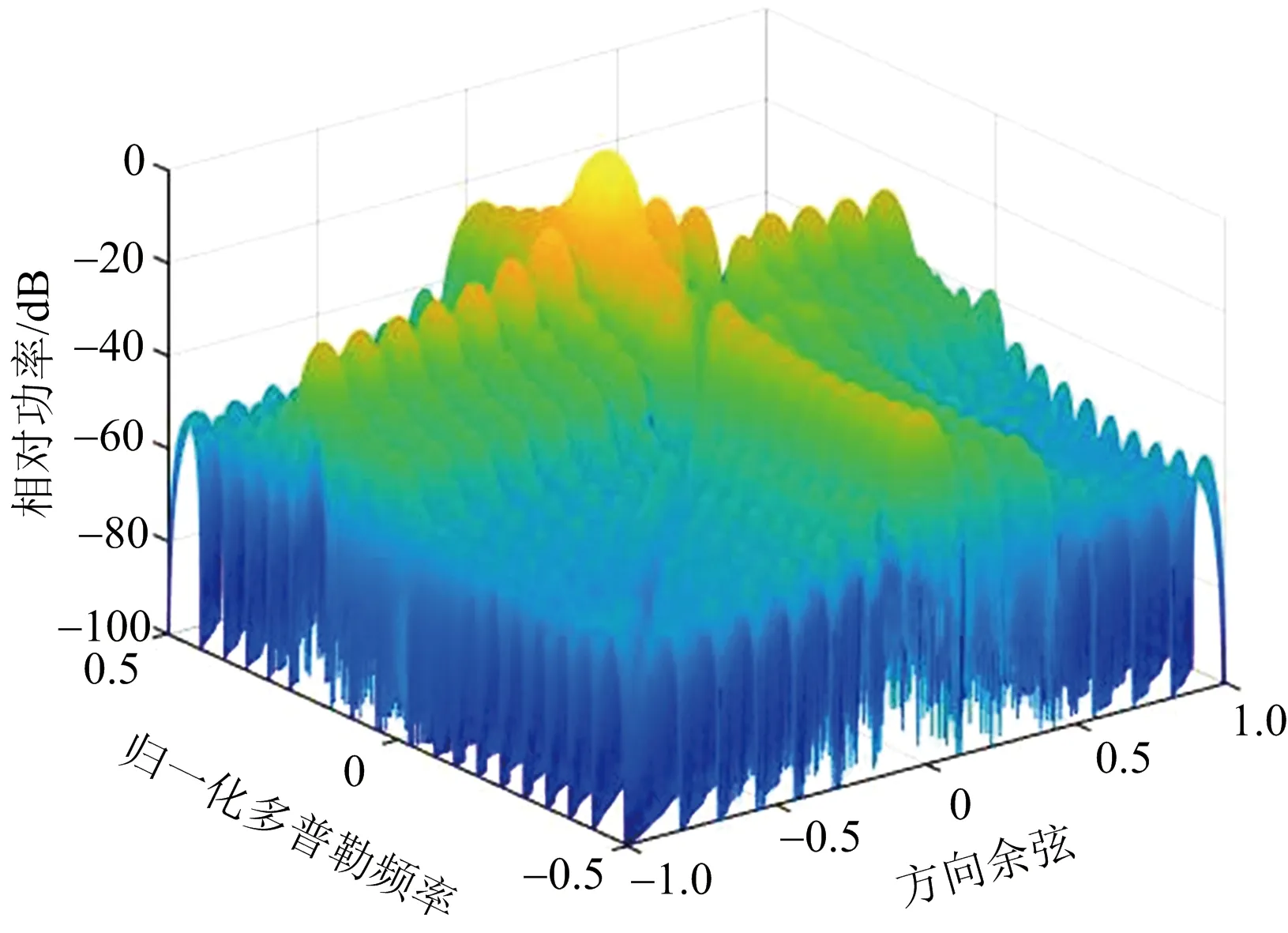
给定空时处理器的最优自适应权矢量时,通过空时二维功率谱可以直观地看出STAP处理器的检测性能,空时二维功率谱的表达式为
(12)
衡量STAP处理器性能的一个常用指标是输出信号干扰加噪声比(SINR),由于目标速度未知,因此用目标多普勒的函数表示SINR性能[10]:
SINR(ωt)=σ2ξtS(ωt)HR-1S(ωt)
(13)
式中,ξt为接收到的单个阵元的单脉冲目标信噪比,σ2为每个阵元的热噪声功率。
无干扰情况下,即在纯噪声环境中,最优处理器wopt=S,此时,最优输出信噪比SNRo表示为
SNRo=MNξt
(14)
将空时处理算法的SINR损失LSINR定义为该算法相对于无干扰环境下匹配滤波器最优输出信噪比SNRo的性能,表达式为
(15)

(16)
式中,Ke为选择的距离单元数。
2 移频灵巧噪声干扰原理
2.1 灵巧噪声干扰信号模型
假设雷达发射信号为线性调频信号,其表达式为
(17)
式中,A为振幅,Tp为脉宽,f0为载频,k为调频斜率,k=B/Tp,rect(t/Tp)表示以Tp为脉宽的矩形脉冲。
干扰机接收到雷达发射信号后,用一视频信号p(t)与其进行卷积调制,并转发给雷达,卷积后的干扰信号为
j(t)=s(t)*p(t)
(18)
用于卷积调制的视频信号p(t)可根据干扰需要灵活选取,本文选取周期方波信号作为该视频信号。p(t)由Nj个周期为Tj的方波组成,方波脉宽为τ,可将其表示为
(19)
式中,An为每个方波的幅度。
利用周期方波卷积干扰生成的灵巧噪声干扰信号与目标回波信号样式基本一致,且干扰信号频率可自动对准雷达信号频率,能量主要集中在中心频率附近,可获得较高的干扰功率利用率,这种干扰方式不需测频就能干扰频率捷变雷达。
2.2 移频干扰信号模型
由于时延的影响,周期方波卷积干扰方式生成的干扰信号总是滞后于目标回波信号,为使假目标可超前于真实目标,可先将接收到的雷达信号移频处理后,再与周期方波卷积。这是因为LFM信号的频移和时延间存在强耦合性,存在如下关系[11]:
fj+kt=0
(20)
当fj>0时,移频假目标超前于真实目标,当fj<0时,移频假目标滞后于真实目标,偏移时间Δtj=fj/k,偏移距离ΔSj=c·fj/2k。因此,可通过调整fj的正负及大小来控制假目标的位置。
移频灵巧噪声干扰原理就是在产生的移频干扰信号jm(t)基础上,与灵巧噪声p(t)卷积,形成移频灵巧噪声干扰。结合式(18)和式(19),该干扰信号表达式可写为
j(t)=jm(t)*p(t)=s(t)ej2πfjt*p(t)
(21)
由于移频处理会给干扰信号造成一定的脉压幅度损失,使得假目标幅度略低于真实目标幅度,这种情况可通过增大用于卷积的方波幅度进行改善。
2.3 关键参数分析
通过调整周期方波的各项参数,可产生不同的干扰效果,下面分别通过脉宽和周期、方波数量、方波幅度三个方面加以简要说明。
1) 脉宽和周期:单个方波卷积干扰信号脉冲压缩后,会产生两个幅度相等的假目标,其包络近似为sinc函数形式的窄脉冲。周期方波卷积干扰信号脉冲压缩后,会产生多组这样的假目标。周期方波的周期Tj决定相邻两组假目标的相对距离,方波脉宽τ决定一组的两个假目标间距。
2) 方波数量:通过调整方波个数可分别形成稀疏多假目标欺骗干扰和密集多假目标压制干扰。
3) 方波幅度:为使匹配滤波后的干扰信号幅度随机起伏,不易被雷达识别,可以给每个方波幅度分别乘一个高斯白噪声,使其具有随机性。
3 移频灵巧噪声干扰对STAP系统检测目标的影响

3.1 对协方差矩阵的影响
将式(31)的移频灵巧噪声干扰信号表示成空时快拍的形式,有
J=j(t)·SJ=s(t)ej2πfjt*p(t)·SJ
(22)
式中,SJ为干扰信号的空时导向矢量。
相应地,干扰协方差矩阵可表示为

(23)

3.2 对空时导向矢量的影响
移频灵巧噪声干扰会在真实目标所在方位角的多个距离单元产生假目标,使得机载雷达在相应方位角的不同仰角处检测到多个目标。由多普勒频率公式fd=2vr/λ=2vcosθcosφ/λ可知,根据多个假目标的仰角,STAP系统会生成多个虚假多普勒频率,影响式(11)中的时间角频率ωt,进而影响式(9)中的时间导向矢量St和式(7)中的空时导向矢量S。由这些假目标生成的多个虚假空时导向矢量S会分别体现在式(12)中空时二维功率谱的多普勒维,严重干扰了多普勒维的检测。致使敌方雷达无法准确得到目标多普勒频率,进而无法计算出目标速度。
4 仿真分析
4.1 移频灵巧噪声干扰信号
仿真参数:LFM信号脉宽20 μs,带宽10 MHz;方波脉宽1 μs,周期2 μs,方波个数为10,方波幅度服从高斯分布,满足:An~N(1,0.25),移频值fj=2 MHz。
图3为移频灵巧噪声干扰效果图,其中,图3(b)中20 μs处为真实目标回波位置,在真实目标附近形成了密集假目标群干扰信号。移频干扰后,使得假目标群向前移动Δtj=fj/k=4 μs,仿真结果与理论值一致。
参与卷积的周期方波幅度服从高斯分布,导致图3(b)中真实目标两侧的密集假目标群幅度随机起伏,不具有规律性,使雷达很难识别待测目标的真实位置。根据实际干扰需要,分别调整方波的脉宽和周期、方波数量、方波幅度等各项参数,可形成更多数量可控、位置可调、幅度可变的灵巧噪声干扰信号。此外,移频值fj决定最左侧干扰信号与真实目标之间的距离差,通过调整fj可灵活控制干扰信号出现的位置,将假目标产生在需要掩护的指定区域上。由于周期方波卷积干扰具有较高的脉压处理增益,因此生成的干扰信号与真实回波信号具有一定的相干性,利用较小的干扰功率就能取得较好的干扰效果。
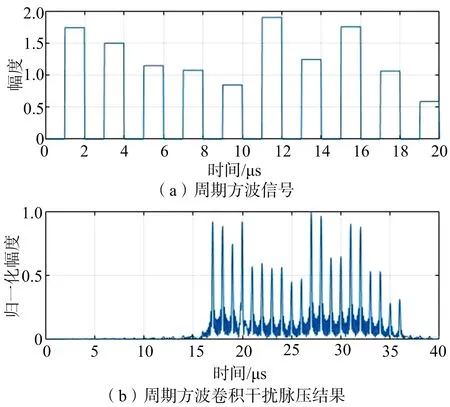
图3 移频灵巧噪声干扰效果图
4.2 干扰对STAP系统的影响
仿真参数如下:
1) 雷达参数 雷达工作频率f0=625 MHz,脉冲重复频率fr=2 500 Hz,脉宽Tp=20 μs,带宽B=10 MHz,天线采用均匀线阵,阵元个数N=16,脉冲积累数M=20,载机平台高度H= 9 000 m,载机速度v=300 m/s。
2) 杂波参数 地面杂波采用等γ模型[10],对于平面地球模型,任意地面散射点的单位后向散射系数满足关系式:σ0=γsinφc,其中,反射因子γ=-3 dB,φc为该地面散射点到载机平台的仰角。
4) 干扰参数 干扰机为自卫式干扰机,干扰机方位角θj=0°,方波脉宽τ=1 μs,周期Tj=2 μs,方波个数Nj=10,方波幅度An服从高斯分布,满足:An~N(1,0.25),移频值fj=2 MHz。
5) 训练样本 在待测距离单元周围选取10个保护单元,在其两侧选取1 290个训练样本。
4.2.1 对多普勒滤波器的影响
在移频灵巧噪声干扰条件下,训练样本中包含大量干扰目标,不再满足IID条件,形成非均匀干扰[12],这些干扰目标使目标所在方位角的多普勒滤波器产生较严重的主瓣畸变,如图4所示。
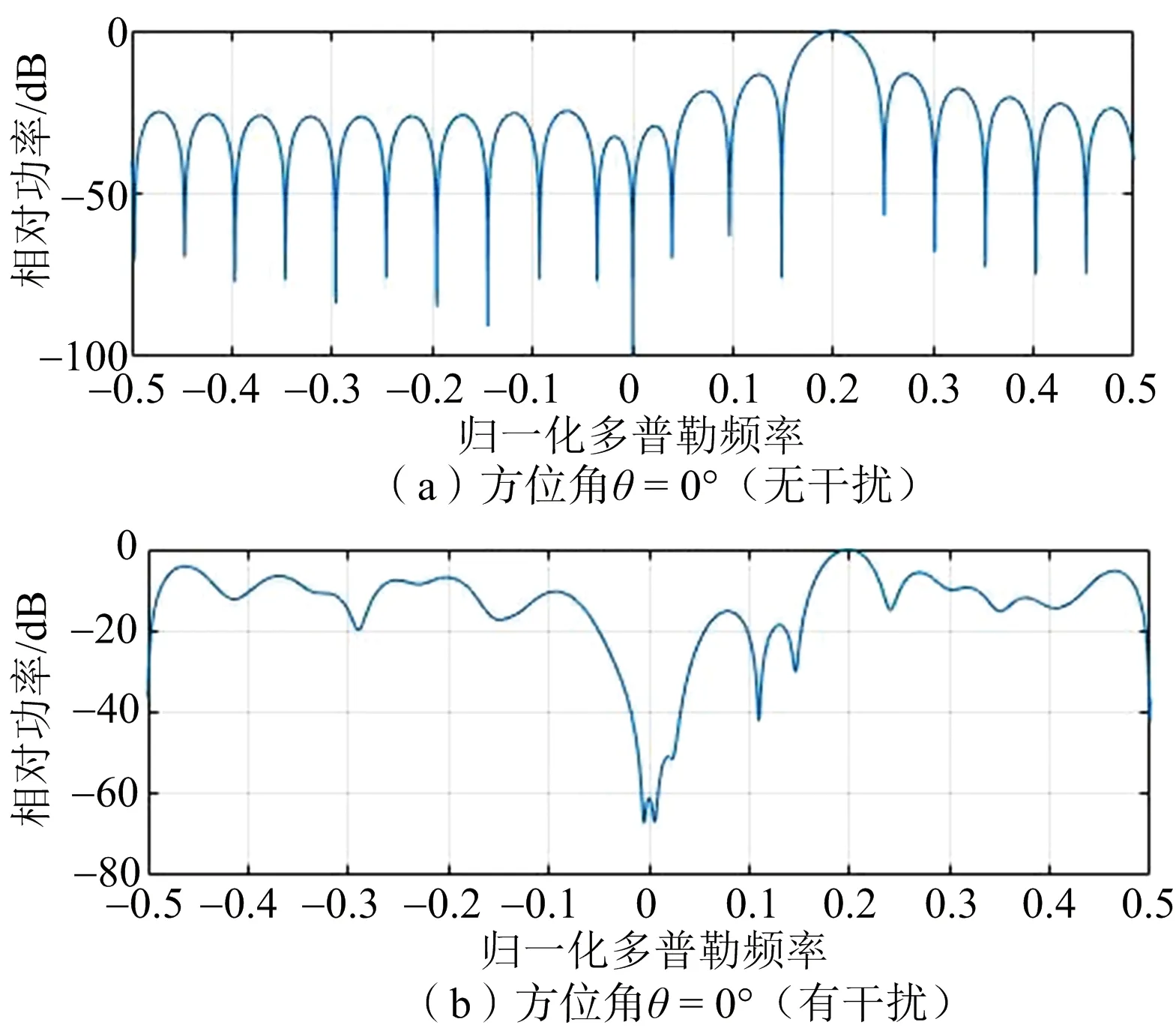
图4 目标所在方位角的最优多普勒滤波器

(a) 无干扰
4.2.2 对SINR损失的影响

5 结束语
本文首先介绍了STAP基本原理,然后将周期方波卷积干扰和移频干扰两种方法结合,提出了移频灵巧噪声干扰方法,并说明了该方法如何影响STAP系统对目标检测。通过调整各项参数,该方法可灵活控制假目标的数目、间距、幅度、位置等关键信息,通过调整假目标数量,可分别实现欺骗干扰和压制干扰,严重破坏训练样本的IID条件,在距离维和多普勒维同时产生干扰,大大降低STAP系统的SINR损失,并展宽滤波器凹口,导致STAP处理器性能急剧下降。综上,本文提出的干扰方法在多普勒域可以起到很好的干扰效果,有很强的适应性,具有工程实用价值。
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
计算技术与自动化(2022年2期)2022-07-04
北京航空航天大学学报(2021年9期)2021-11-02
海军航空大学学报(2021年1期)2021-09-01
舰船电子工程(2020年1期)2020-03-03
科技资讯(2018年19期)2018-01-28
中外医学研究(2017年36期)2018-01-26
光学仪器(2015年2期)2015-05-20
物理教学探讨(2014年5期)2014-09-18