基于模糊PI 的开关磁阻电机直接转矩控制仿真研究
2020-07-21 06:40:16杜晓婷凌六一刘聪美
淮南师范学院学报 2020年2期
韦 颖,杜晓婷,凌六一,刘聪美
(1.安徽三联学院 电子电气工程学院,安徽 合肥 230601;2.安徽理工大学 电气与信息工程学院,安徽 淮南 232001;3.上海向晟电子科技有限公司,上海 200000)
1 引言
开关磁阻电机 (Switched Reluctance Motor,SRM)具有结构简单、易于实现软启动和四象限运行、可靠性高、抗干扰能力强等优点,在电动汽车、动力牵引、煤矿绞车、机械提升、架线电机车等各个领域已得到广泛应用[1-4]。 然而,随着SRM 在各领域的广泛应用和深入开发, 其缺点也逐渐暴露,对SRM 的精确控制、噪声大小,尤其是抑制其转矩脉动的要求也越来越高。
开关磁阻电机的双凸极结构以及磁路饱和非线性导致低速运行时转矩脉动较大。 为此,如何抑制转矩脉动成为SRM 调速系统首要解决的问题,是众多学者研究的焦点。 成佳等[5]通过有限元方法改进SRM 转子齿形, 减小了转矩脉动, 增加了SRM 的平均输出转矩;徐进[6]等将响应面法,并结合遗传算法用于SRM 阶梯气隙的优化设计, 来减小SRM 转矩脉动;党选举等[7]将分数阶PID 与二维模糊控制器相结合实现对SRM 直接瞬时转矩的优化控制;朱曰莹等[8]提出三指标同步优化思想设计SRM 驱动系统来改善电机转矩脉动动态特性;颜宁[9]等应用全桥变换器对SRM 转矩进行直接控制,并得到了良好的转矩特性;周峰[10]等使用不对称半桥式拓扑结构的功率电路驱动小功率SRM,获得了较小的转矩脉动。
近年来,研究学者主要从优化电机结构、驱动电路拓扑结构以及驱动系统的控制策略等方面来解决SRM 转矩脉动抑制问题。其中,选择合适的控制策略是减小SRM 转矩脉动最为有效的措施,而电流斩波、电压斩波、角度位置等传统控制策略无法有效减小SRM 噪声和降低转矩脉动。 针对传统控制方法存在的不足,本文应用直接转矩控制策略改善SRM 转矩特性,同时考虑到单一的PI 调节或者模糊调节存在参数调节繁琐、调节时间长、超调量大、带负载能力差等缺点,在电机速度控制环节,采用低速PI 控制、 高速模糊控制相结合的模糊PI控制方法优化电机调速性能。
2 SRM 的工作原理
图1 所示的是双凸极四相8/6 型开关磁阻电机的剖面图,转子有6 个凸极,定子有8 个凸极,绕组位于定子之上,定子上相对位置的2 个凸极上的绕 组 串 联 形 成 一 相, 共 四 相(AA’、BB’、CC’、DD’)。 如图1 所示的AA’相绕组回路,S1 和S2 是功率型开关器件,当S1 和S2 导通时,AA’相绕组得电,产生磁力使转子逆时针转动,当转子转到其轴线11’与AA’重合位置时,断开S1 和S2,通过二极管D1 和D2 对绕组电流进行续流。接下来,依次给BB’、CC’、DD’相绕组通电,周而复始以维持转子逆时针方向转动。改变绕组的通电顺序可以改变电机的旋转方向,改变绕组的电流大小和电流维持时间就可以改变电机转矩和转速。
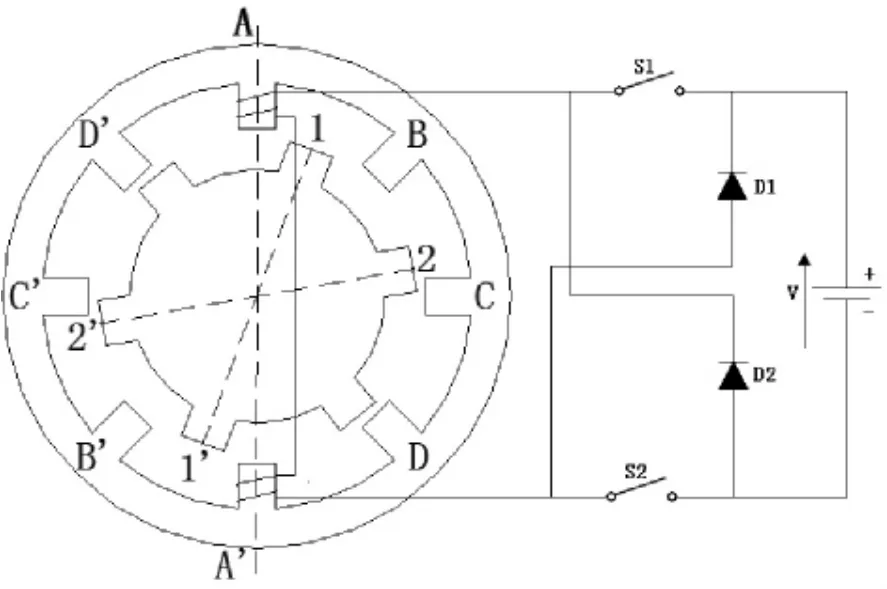
图1 开关磁阻电机剖面图
3 SRM 直接转矩控制策略
3.1 SRM 直接转矩控制的基本原理
由电机的瞬时转矩方程可得:

式(1)中:T 为电机瞬时转矩;i 为定子绕组电流;Ψ 为定子磁链;θ 为转子位置角。 通过式(1)可以看出,电机瞬时转矩T 与定子绕组电流i、定子磁链Ψ 随转子位置角θ 的变化情况有关。 在定子电流i 幅值不变情况下,若定子磁链Ψ 超前θ,则T 增加,否则若Ψ 滞后θ,则T 减小。 由于,将此式离散化,可得:

即:

式中:TS为采样周期。

图2 磁链矢量与电压矢量关系图
磁链矢量与电压矢量之间的关系见图2,当磁链矢量与电压矢量的夹角的γ 绝对值大于90°时,磁链幅值将减小;当γ 等于90°时,磁链幅值保持不变;当γ 小于90°时,磁链幅值将增大。 当磁链矢量超前于电压矢量时,转子位置角θ 也将超前于定子磁链;反之,θ 滞后于定子磁链。 因此,合理选择电压矢量,可以实现SRM 转矩控制。
3.2 直接转矩空间电压矢量选择
通过功率型开关器件的开关状态完成空间电压矢量的选择。文献[11]给出了八种有效的空间电压矢量及其对应的开关器件开关状态图,见图3。 通过在不同相施加不同的电压状态(正、负、零电压),可以得到需要的电压矢量。 例如, 电压矢量U1(1,0,-1,0)表示AA’、BB’、CC’、DD’四相的电压状态分别为正电压、零电压、负电压和零电压。
除此之外,招股书显示,米奥会展主营境外办展业务,以美元、欧元结算为主,其2015年-2017年汇兑损益分别为224.06万元、121.87万元、-322.38万元。今年4月以来,美元持续走高,若人民币持续贬值,米奥会展采购成本则上升,结算时造成的汇兑损益将进一步扩大,恐将对今年业绩带来一定不利影响。

图3 八种空间电压矢量图
由2.1 节分析可得: 任意定子空间坐标下,选择U(k+1)和U(k-1)可以增加磁链;选择U(k+3)和U(k-3)可以减小磁链;选择U(k+1)和U(k+3)可以增加转矩;选择U(k-1)和U(k-3)可以减小转矩,据此可建立转矩控制开关表。
3.3 直接转矩控制基本结构图
SRM 直接转矩控制系统结构框图如图4 所示。控制系统主要包括转矩闭环控制和磁链闭环控制两大块,SRM 实际转矩和实际磁链根据定子电压、电流和转子位置角等参数计算后得到。
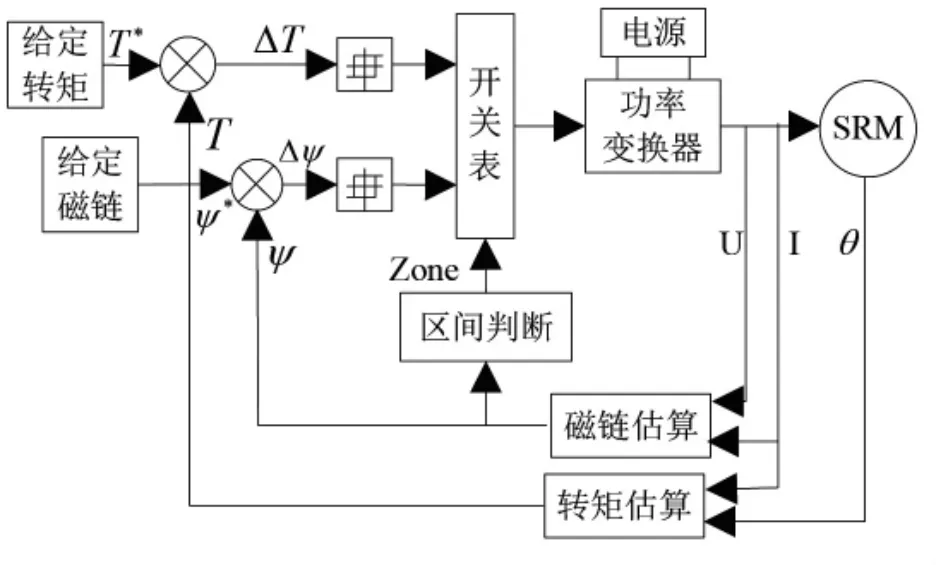
图4 SRM 直接转矩控制系统结构框图
4 SRM 模糊PI 速度调节器
在普通模糊控制基础之上增加比例积分控制构成模糊PI 控制,本系统设计的模糊PI 调节器以SRM 速度误差和误差变化率作为输入, 以参考转矩作为输出。由于模糊控制器将较小速度误差当作零值处理,存在控制盲区,导致了稳态误差[3]。 因此, 本文在速度误差较小时采用PI 控制来减小控制盲区,并增加了积分环节,而且积分环节的控制时间由速度误差的大小来决定。
4.1 输入变量的模糊化
本文设计的控制系统中, 给定转速为1000r/min,因此均以[-1000,1000]作为速度误差e、误差变化量ec 的基本论域。 以[-200,200]作为转矩u的基本论域。 根据SRM 基本特性,均以[-6,6]作为输入、输出量的模糊论域,所以速度误差e、误差变化量ec 以及转矩u 的论域变换比例系数分别为:ke=6/800,kec=6/800,ku=200/6, 对三者进行模糊化、反模糊化计算公式为:
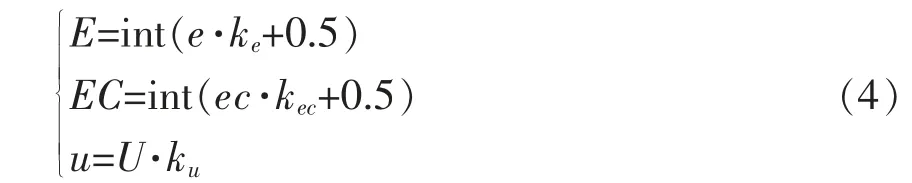
以三角函数作为模糊控制隶属度函数, 将输入、输出语言变量均量化成7 级,分别为: “PB(正大)、PM(正中)、PS(正小)、ZE(零)、NS(负小)、NM(负中)、NB(负大)”,并规定模糊子集在E、EC、U论域上均匀分布。
4.2 模糊控制规则
结合人工操作经验,设计控制规则如下:
(1)当SRM 转速大于给定转速时,减小期望转矩,期望转矩的减少量随转速增加量增大而增大。
(2)当SRM 转速等于给定转速时,期望转矩保持不变。
(3)当SRM 转速小于给定转速时,增大期望转矩,期望转矩的增加量随转速减少量增大而增大。
将上述控制规则转化为模糊语言可得模块控制表,如表1 所示。

表1 模糊控制规则表
例如,当模糊输入的速度误差E=NB(负大)、速度误差变化量EC= NB(负大)时,说明SRM 实际转速已经远远大于给定转速,并且转速的增加量也很大,此时应该迅速减小SRM 期望转矩,因此模糊输出U 应该选择NB(负大)。
4.3 模糊推理和解模糊
本系统采用Mamdani 推理法进行模糊推理,采用加权平均法进行解模糊,具体解模糊公式为:
式 (5) 中:ui为模糊控制器输出语言变量,μU(ui)为ui对应的隶属度。
离线计算以E=4、EC=1 为例:通过隶属度函数图可得: 二者对应的隶属度为:uPM(E=4)=1、uZE(EC=1)=0.5、uPS(EC=1)=0.5,通过模糊控制规则表可得:

基于Mamdani 方法模糊推理, 输出变量的隶属度取最小值:

代入式(5)可得式(6),其他数据计算同理。

4.4 模糊PI 复合控制
对于模糊控制器来说, 由于没有积分作用,导致稳态误差的存在。 针对模糊化公式E=int(e·ke+0.5)=0,当速度误差e<84 时会出现控制盲区,为此本系统选择PI 控制消除此盲区。 模糊控制与PI 控制方式的选择由图5 中的switch1、switch 开关根据速度误差e 的大小自动进行切换。 当速度误差e<84 时, 两个开关均切换至下端接通, 此时连接PI控制器,断开模糊控制器;反之,两个开关均切换至上端接通,此时连接模糊控制器,断开PI 控制器。
5 SRM 仿真结果和实验结果分析
本系统以四相8/6 型开关磁阻电机为例,利用MATLAB 建立SRM 直接转矩控制系统仿真模型,如图5 所示。 SRM 额定功率60kW, 额定电压300V,负载转矩12N.m,给定转速为1000r/min,给定磁链为0.295Wb。 为提高仿真精度,仿真采用固定步长模式,步长参数取10-6s,解法器采用适合于离散系统的Discrete 方法。
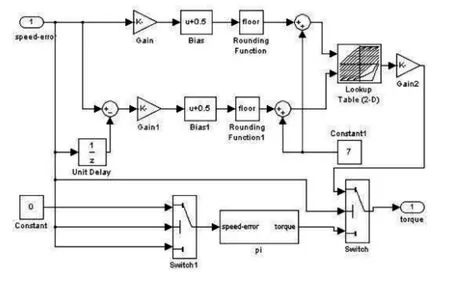
图5 模糊-PI 复合控制器
图6 给出了SRM 磁链仿真结果, 采用直接转矩控制SRM 磁链轨迹为圆形,磁链幅值恒定。 文献[5]采用电流斩波控制方式, 其磁链轨迹为四边形,说明直接转矩控制对SRM 磁链控制效果更好。

图6 直接转矩控制下SRM 磁链轨迹图
待SRM 稳定运行后的0.04s 时刻突加转矩为12N.m 的负载,以此测试SRM 带负载能力。图7 给出了PI、 模糊、 模糊PI 三种不同控制方式下的SRM 转速响应曲线,(a) 为SRM 转速响应曲线整体轮廓,(b)为SRM 转速响应曲线的局部放大图。
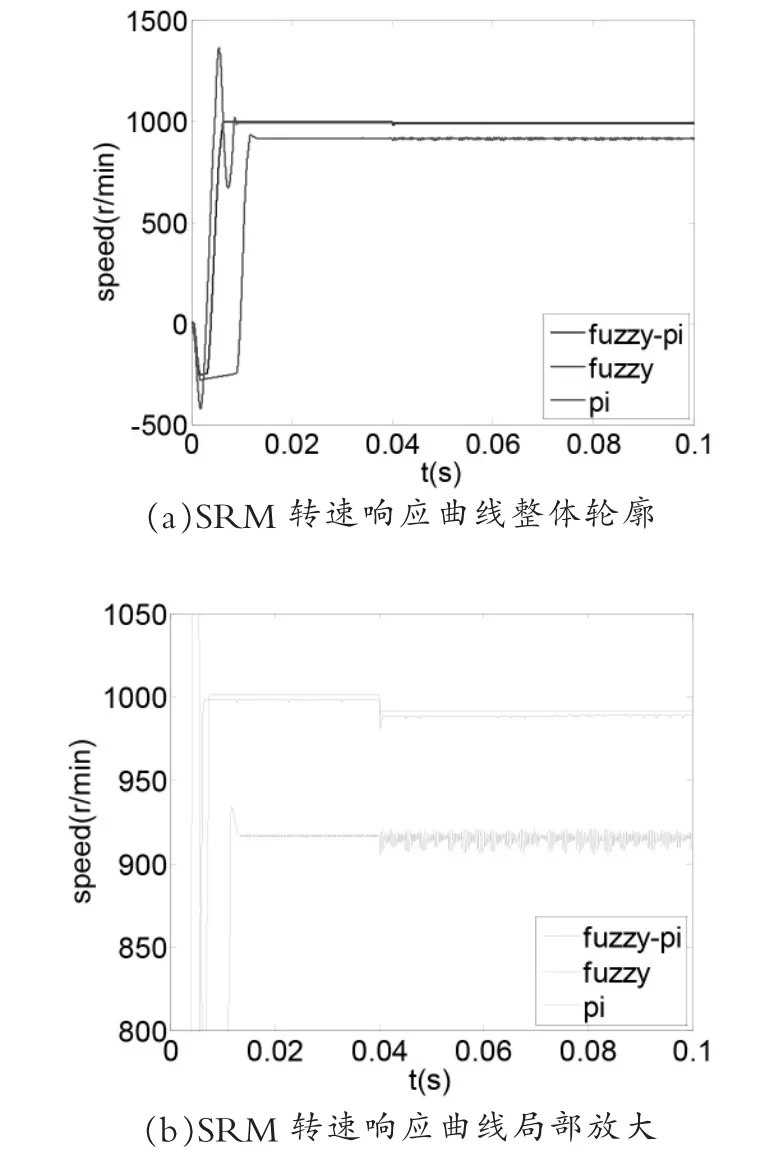
图7 SRM 转速响应曲线
对上述SRM 转速特性曲线进行分析, 可得三种控制方式下的动、静态性能指标,见表2。
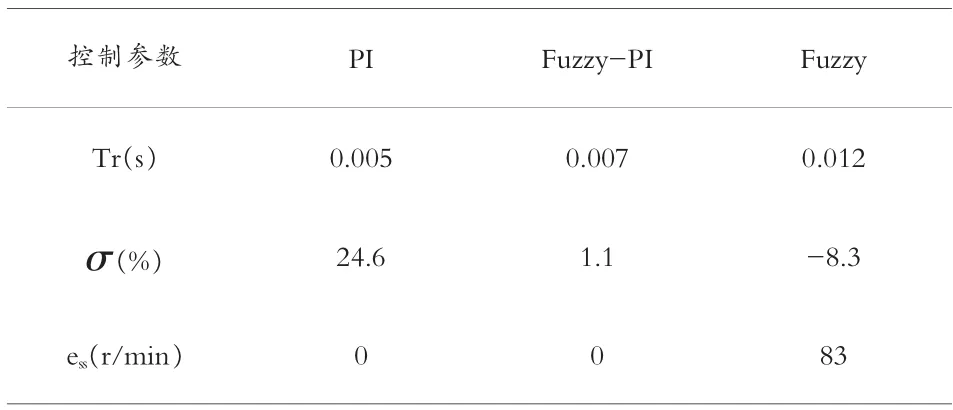
表2 各控制方法的动静态性能指标
上述三种不同控制策略获得的SRM 转矩曲线如图8 所示,(a)为SRM 转矩曲线整体轮廓,(b)为SRM 转矩曲线局部放大。 从图8 中可以看出,模糊PI 控制策略在空载启动时的转矩脉动均小于其他两种控制策略, 之后包括带载后模糊PI 和PI 相比于模糊控制策略, 其转矩明显稳定, 在加入负载后模糊PI 和PI 控制策略的转矩脉动区别不大,这是因为此时速度误差较小,图5 中的复合控制器开关已切换到PI 控制器, 即此时系统采用PI控制策略。
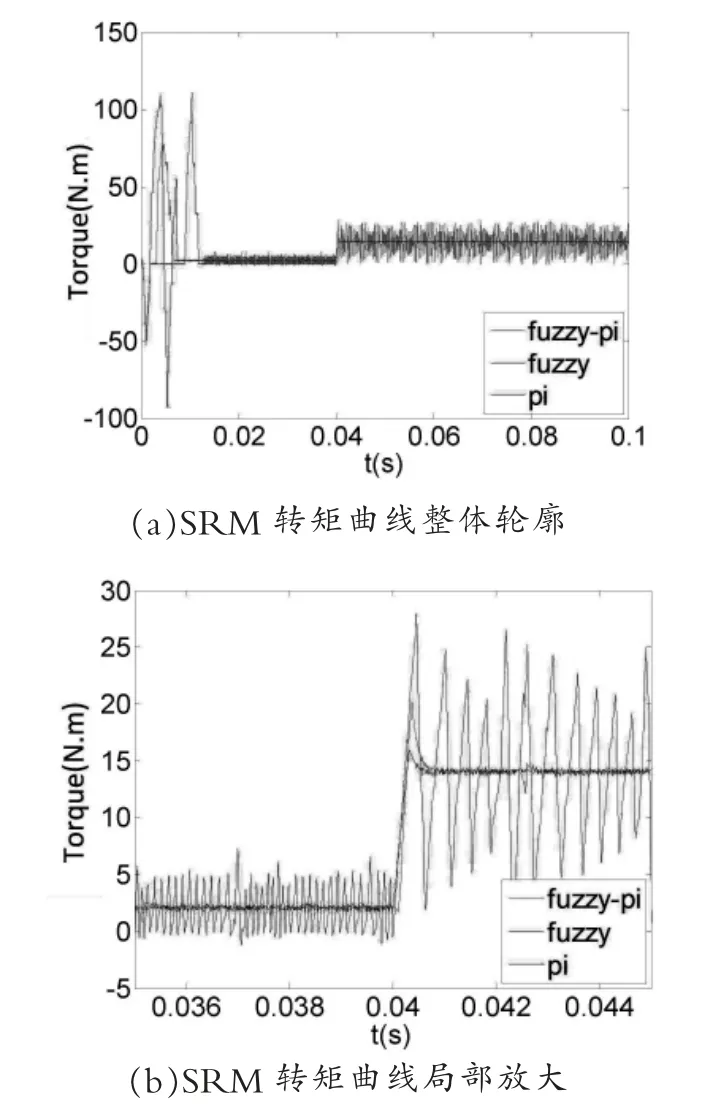
图8 SRM 转矩曲线
结合图7、 图8 曲线和表2 数据可以看出,模糊PI 控制策略具有超调量小、响应速率快、抗干扰能力强等优点,SRM 动、静态性能均优于另外两种控制方式。
6 结论
基于SRM 瞬时转矩方程, 以控制定子磁链幅值恒定以及控制定子磁链超前或滞后于转子位置角,实现了SRM 直接转矩控制。 在SRM 速度控制环节,采用低速PI 控制、高速模糊控制相结合的模糊PI 控制策略, 使SRM 速度控制具有了超调量小、响应速率快、抗干扰能力强等优势,SRM 动、静态性能得以优化,电机的转矩脉动明显减小。
猜你喜欢
家教世界(2023年25期)2023-10-09 02:11:56
中国特种设备安全(2022年3期)2022-07-08 02:21:56
阅读(低年级)(2018年5期)2018-05-14 15:47:44
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
电测与仪表(2016年10期)2016-04-12 00:26:38
通信电源技术(2016年5期)2016-03-22 01:09:57
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电源技术(2015年11期)2015-08-22 08:50:38
电测与仪表(2014年23期)2014-04-04 12:08:30