
侧扫声呐原始数据解析与可视化显示
2020-07-21 03:03王方旗丁继胜隋海琛许方正
海岸工程 2020年2期
赵 昆,王方旗,丁继胜*,隋海琛,许方正
(1.山东科技大学 测绘科学与工程学院,山东 青岛266590;2.自然资源部 第一海洋研究所,山东 青岛266061;3.交通运输部 天津水运工程科学研究所,天津300456;4.天津水运工程勘察设计院 天津市水运工程测绘技术重点实验室,天津300456)
随着人类将资源的勘探、开发和利用深入到海洋领域,海底地形地貌测量作为海洋工程建设、海洋资源开发等活动的基础将发挥其重要作用[1]。海底图像是海底地形地貌测量的主要成果。声呐成像是获取海底图像的重要方式,其设备包括多波束测深系统、侧扫声呐系统、合成孔径声呐系统等。侧扫声呐由于成像分辨率高、对目标区域海底实现全覆盖扫侧,据此对海底地形地貌等进行定性分析,被广泛应用于目标探测,沉船及失事飞机等海底残骸的搜索,海底表层沉积物属性的确定以及海底地震、火山、地层的监测等[2]。
侧扫声呐系统在测量过程中,受其成像机理、系统参数设置以及复杂的海洋环境等因素影响[3],得到的海底地形图像信息存在几何畸变和辐射畸变,因此需要对侧扫声呐图像进行必要的预处理,进行几何校正、辐射改正以及噪声抑制等。要完成以上侧扫声呐图像处理,应准确对侧扫声呐原始数据进行解析,获取必要要素数据,并将各要素数据以图像形式进行再现。使用者根据图像再现结果,进行分析处理。侧扫声呐原始数据包含扫测目标物坐标、测量瞬时速度、姿态、回波强度和时间等基础信息参数,正确高效地解析侧扫声呐原始数据是进行侧扫声呐图像预处理的重要环节。当前主流的侧扫声呐处理商业软件(如Sonar Wiz、Triton)只为用户提供直接读取原始数据并成像,不对用户开放原始声呐数据中各参数的单独获取功能,不便于用户对后续侧扫声呐图像处理功能进行二次开发。本文通过分析侧扫声呐工作原理及瀑布图结构与特点,对XTF格式的侧扫声呐原始数据结构进行深入研究,分析各要素数据十六进制编码格式及存储形式;在此基础上,编程实现数据读取与解码,生成解析后文件,利用灰度转换模型生成瀑布图,实现XTF格式侧扫声呐数据的可视化显示。
1 侧扫声呐工作原理
侧扫声呐系统由工作站、绞车、拖曳电缆、拖鱼、GPS接收机等组成。在拖鱼两侧各布设有换能器阵列,换能器按一定频率向海底以球面波形式发射脉冲声信号,波束在遇到水体中目标物或到达海底后发生后向散射沿原路线返回,其声波强度也随着传播距离不断衰减,换能器接收返回的波束并记录其回波强度[4-8]。侧扫声呐在垂直于航迹方向上波束较宽,波束开角大,可照射两侧很宽区域;在沿航迹方向上波束很窄,开角小,以达到较高的航向分辨力[1]。图1为侧扫声呐工作原理图,α为垂直于航迹方向上波束开角,β为沿航迹方向上波束开角。
声呐换能器接收到的第一个回波信号一般来自拖鱼正下方,其强度较大,之后接收到的回波在强度上具有较好连续性,可以通过计算第一个回波的位置获得拖鱼的高度信息[9]。传播过程中受传播损失和噪声干扰,当距离大于声呐的最大量程时,换能器无法区分环境噪声中的回波信号,根据量程设置完成一次测量的结束,一次测量得到的回波序列称为1 Ping回波。声呐在前进过程中,不断发射、接收处理回波信号,将采集的每Ping的回波强度信息转化为灰度信息,即形成回波图像序列,将左右舷的回波图像序列进行拼接,形成侧扫声呐瀑布图像(图2)。
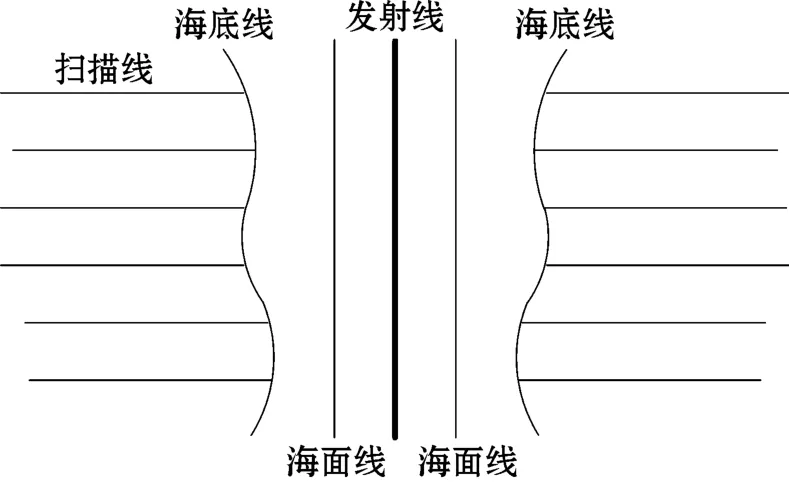
图2 瀑布图结构Fig.2 Structure of the waterf ull i mage
侧扫声呐瀑布图由发射线、海底线、扫描线和海面线组成。发射线也称零位线,是换能器发射声脉冲信号的起始端,通过该线可量取拖鱼至目标的斜距;海底线表示拖鱼距离海底的高度,海底线跟踪的准确性影响后续图像改正的效果;扫描线对应换能器发射的每一Ping声脉冲,其是瀑布图最主要的组成部分;海面线反映拖鱼到海面的距离,目前主流的侧扫声呐采集的图像一般没有海面线。
2 XTF文件格式分析
XTF(e Xtended Triton For mat)文件格式①Triton Imaging,Inc.EXtended Triton For mat(XTF).https:∥www.tritoni maginginc.co m.是目前应用最广泛的声学探测数据保存文件格式之一,其满足了不同类型的声呐、航行、遥测和水深等数据的保存需要,它的伸缩性和可扩展性较强,便于扩展成将来新的数据类型,数据结构见图3。
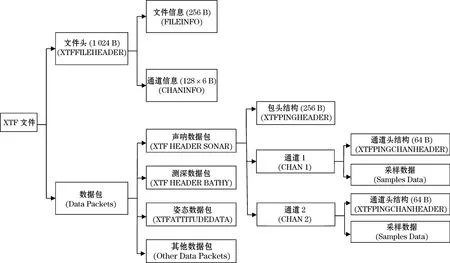
图3 XTF格式数据结构Fig.3 Str ucture of XTF data for mat
XTF文件记录的数据均由一个1 024 B的文件头开始,文件头储存在XTFFILEHEADER结构中。文件头分为文件信息和通道信息:文件信息包含了声呐类型、导航单元、通道个数、文件名等信息;通道信息包含了通道类型、采样点字节数、传感器安装参数等信息,以每个通道128 B的大小储存在CHANINFO结构中。如果通道数量超过6个,则文件头以1 024 B的大小增加。
紧接在文件头后的是数据包,每个数据包的前14 B包含了可用于判断该数据包类型、大小和通道数量等关键信息。数据包主要包括声呐、测深、姿态和导航等类型,类型不同,数据储存结构及方式也略有差异。声呐数据包(表1)和测深数据包分别具有独立的包头结构(XTFPINGHEADER和XTFBAT H HEADER),大小为256 B,主要包含了日期、时间、位置及姿态等信息;包头后面紧跟着通道头(XTFPINGCHANHEADER)数据,通道头中主要包含了声呐的发射频率、采样数及增益参数等信息,通道头后是该通道数据。姿态包、导航包等数据包不具有独立包头,它们是由前14 B的关键信息及其它数据共同组成的64 B数据包。
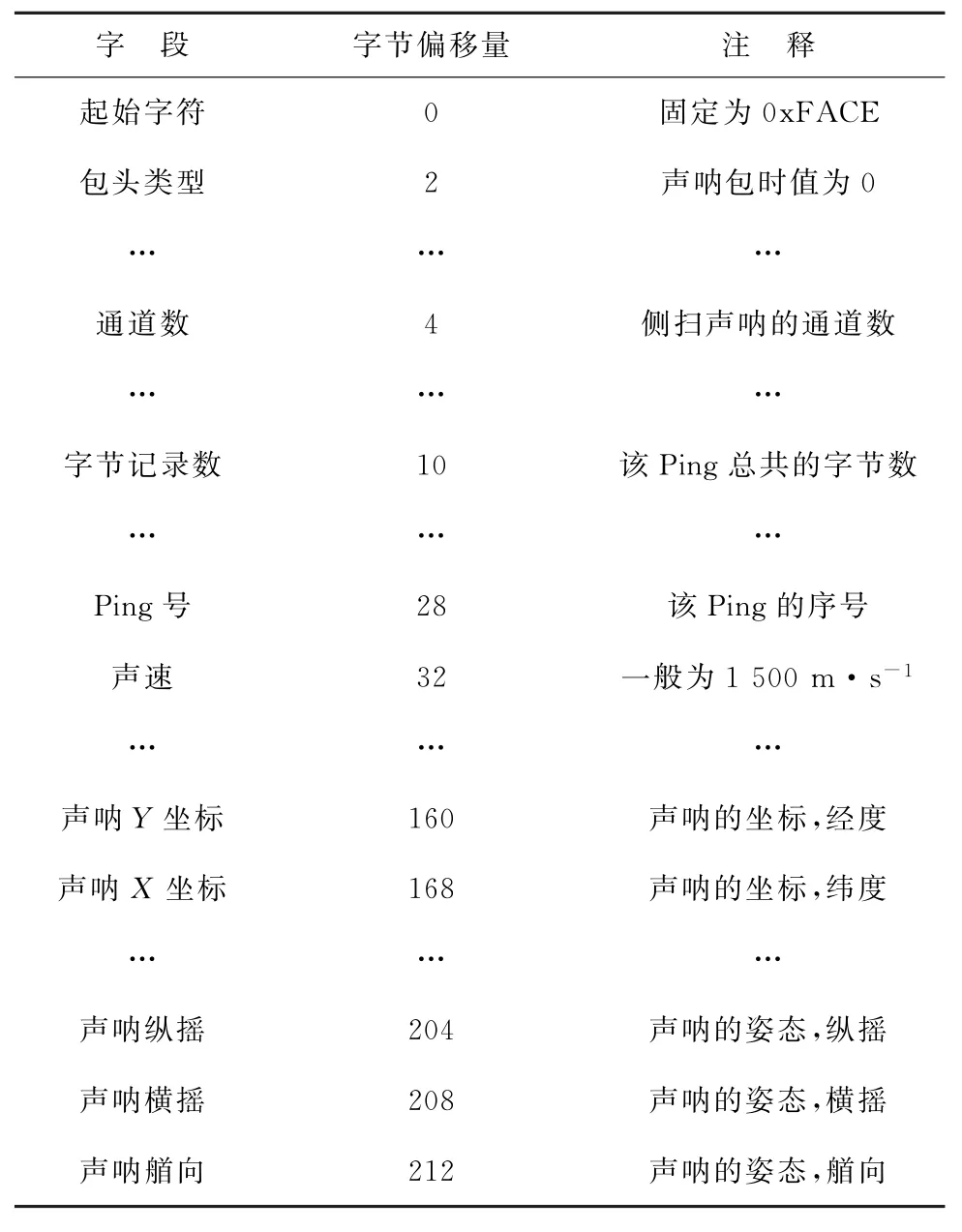
表1 XTF声呐数据包头结构Table 1 The str ucture of sonar datapacket of XTF for mat
3 数据解码方法
XTF格式文件的读取流程见图4。首先读取第一个字节,判断该文件是否为XTF文件,XTF格式文件第一个字节被固定设置为0x7B(十进制为123)。当确定文件为XTF格式时,读取进入XTFFILEHEADER结构,该结构中Nu mber Of Sonar Channels参数为文件中通道个数,当通道个数>6时,需增加读取1 024 B。每个通道大小为256 B,通过读取通道信息中Type Of-Channel参数,可以获取当前通道类型:浅剖(SUBBOTTOM=0)、左舷(PORT=1)、右舷(STBD=2)和测深(BAT HY METRY=3)。值得注意的是,通道信息中Bytes Per Sample参数记录了当前通道的采样精度,值为1,2和4时,分别对应8位、16位和32位,该参数值与数据包中采样点个数的乘积即为采样字节数。
读取完文件头后,紧接着读取声呐数据包,首先读取数据包中XTFPINGHEADER结构的前14 B,该段数据里包含了用于判断数据包类型的Header Type参数和储存了该数据包字节数的Nu mBytes This Recor d参数。当Header Type值为0时,表示该包为声呐数据包,否则跳过Nu mBytes This Record值的大小,读取下一个数据包。确定为声呐数据包后,遍历整个文件,获取总Ping数,设置Max Ping To Read参数作为判断标志,采用循环结构读取Ping数据。进入循环后,读取每Ping数据的Ping号、日期、时间、坐标和姿态等信息储存到提前建立的空数组当中,读取完256 B的XTFPINGHEADER结构后,根据结构中Nu mChans To-Follow参数判断通道个数,直接进入XTFPINGCHANHEADER结构读取通道信息,其中Channel Nu mber参数表示了该通道类型:值为0表示左舷(低频)、值为1表示右舷(高频)、值为2表示左舷(高频)、值为3表示右舷(高频)。按照以上解码方法,可将XTF文件中所有Ping数据进行解码储存,以便于后续瀑布图显示及图像处理使用。
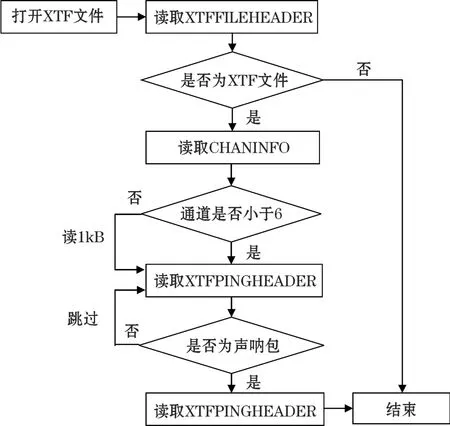
图4 XTF文件读取流程Fig.4 Flow sheet of XTF file reading
4 声呐数据可视化原理
侧扫声呐图像是根据每条扫描线中的像素的灰度变化,形成灰阶强弱反差,较强灰度的灰阶形成一定大小的几何形态反映目标图像[1]。图像的灰度强弱直接反映了回波信号的幅度变化,回波强度幅度变化主要与海底地形、地貌特征、海底底质类型等相关。原始数据采样精度分为8位和16位,声呐数据成像时,通常需要根据接收到的信号强度不同将数据量化至0~255范围内的灰度级,此时需要建立声强信息和描述图像的灰度信息之间的转换模型。
采样精度为8位的侧扫声呐数据强度数据范围为0~255,因此可直接转换为灰度信息。采样精度为16位的侧扫声呐数据量化公式为


式中:G为量化后灰度值数据;GB为量化前回波数据;Gmax和Gmin分别为灰度图像的最大值和最小值;GBmax和GBmin分别为回波数据的最大值和最小值;C为常数;m为原始回波数据的采样精度;n为量化后的数值精度。
式(1)仅将16位采样精度的回波信号强度转化至0~255灰度级,适用于采样回波强度较均匀的声呐数据,其优点在于可以直接显示原始图像中不同目标的回波强度差异,但对于回波强度较弱区域,不能进行强度增强,使该区域图像较暗,不利于辨识图像的细节信息。式(2)在进行灰度级转化的同时,对回波强度进行了增强,适用于采样回波强度较弱的声呐数据,其优点在于可以有效补偿图像远端区域的回波强度,使图像远端区域的目标物显示明显,使用该式时可以通过改变常数的数值达到调节强度补偿的效果,但该式改变了原始数据的回波强度,目标物与周围环境强度差异变小,降低了图像的对比度。
5 实例分析
采用渤海海域沉船搜寻实测数据对以上方法进行验证分析。扫测区域位于渤海北部海域(图5)。根据上述数据解码与可视化方法,使用Matlab编程实现对侧扫声呐XTF格式原始数据的解码与图像可视化。
程序界面分为读取文件、信息提取、图像显示、预处理和帮助五个模块(图6)。信息提取功能可以生成Inf o.txt文件和Trace.csv文件。其中,txt文件包含了该条测线的基本信息,主要包括上述的XTFFILEHEADER结构和CHANINFO结构。图7为解码沉船扫测原始数据生成的t xt文件,从解码信息中可知,本次扫测使用的是Edgetech公司的4200-MP型侧扫声呐系统,该声呐发射左舷和右舷两条通道回波信号,发射频率为403 k Hz,左舷和右舷都为16位的采样精度。csv文件以按Ping号排序方式列出了该条测线的航迹信息(图8),包括每Ping数据的Ping号、日期、时间、纬度、经度、速度和横摇、纵摇、艏向等姿态信息。通过解码得到的仪器型号、日期、位置等具体参数和扫测实际情况与XTF格式说明手册①进行对比,验证了原始数据解码结果的正确性。
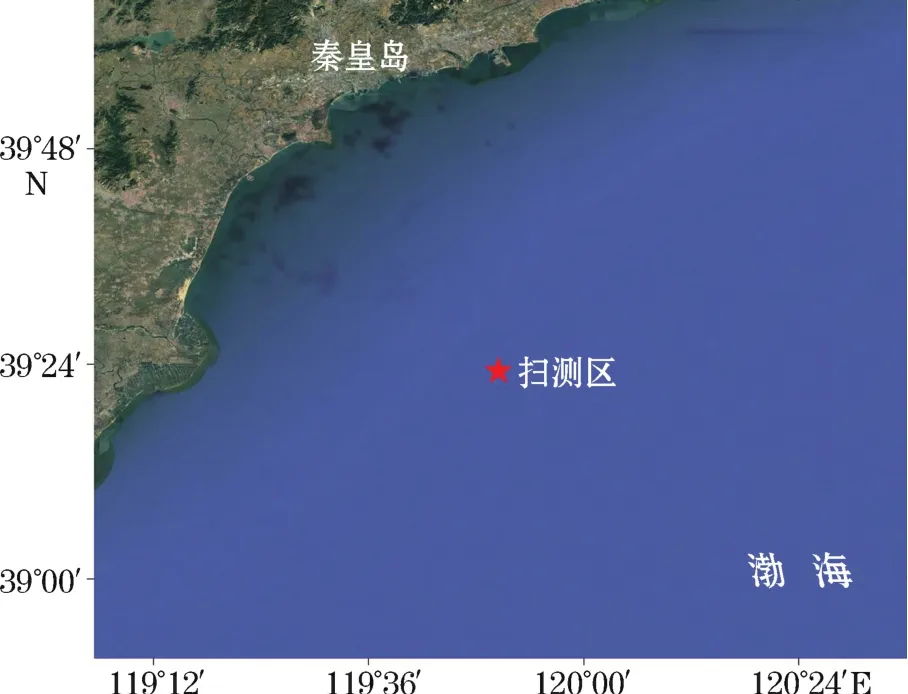
图5 扫测区位置Fig.5 Location of the sur vey area of side-scan sonar

图6 程序界面Fig.6 Interface of the progra m
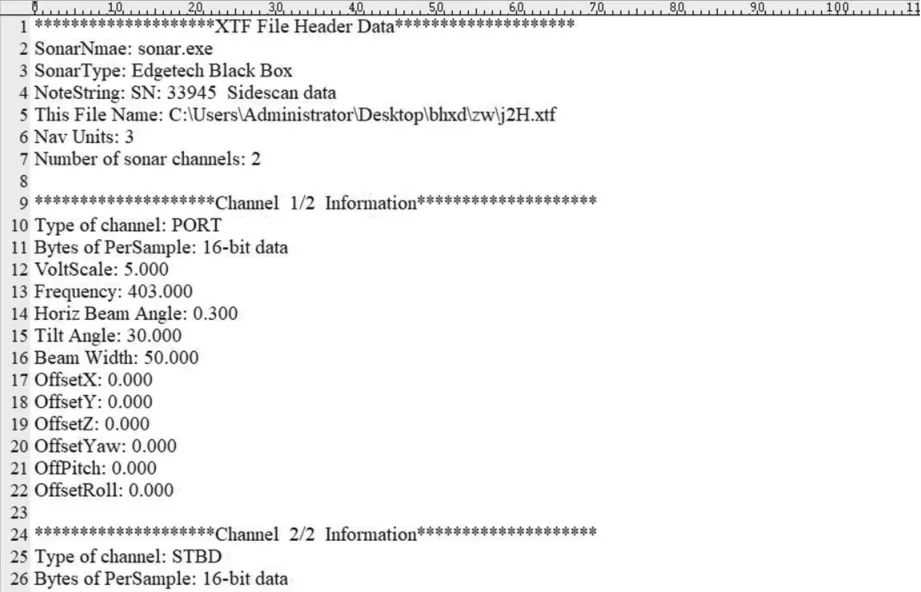
图7 XTF File Info.txt文件Fig.7 Inf o.txt of XTF file
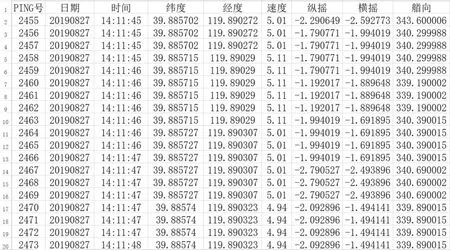
图8 Trace.csv文件Fig.8 Trace.csv file
程序的图像显示功能为对原始数据解码后,进行瀑布图的显示。图9为解码测线得到的某一Ping回波序列的16位原始采样数据,左右舷两侧采样点数都为8 510,回波强度由拖鱼下方向两侧衰减,且两端采样点回波强度较弱,右舷因扫测到目标物回波强度变化明显。分别应用式(1)和其中式(2)量化后的回波数据见图10和图11,与原始回波数据相比,应用2种转换模型后将原始强度数据量化至0~255灰度级。其中式(2)转换模型在对数据进行量化的基础上,有效补偿了回波强度。
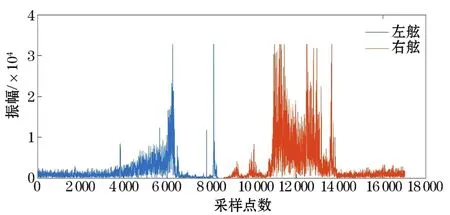
图9 原始回波强度Fig.9 Intensity of t he raw echo
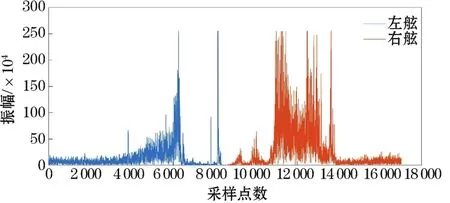
图10 应用式(1)量化的回波强度Fig.10 The echo intensity quantified with For mula(1)
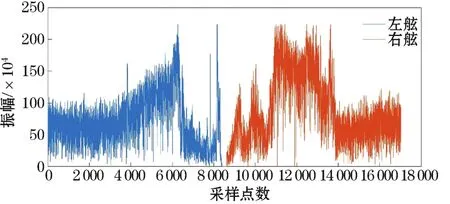
图11 应用式(2)量化的回波强度Fig.11 The echo intensity quantified with For mula(2)
将按左舷右舷横向排列的每一Ping的回波数据依发射接收的时间序列拼接在一起,就形成了完整的侧扫声呐瀑布图像。图12为程序实现显示的瀑布图,图12a为应用式(1)量化后生成的瀑布图,沉船及其周围回波强度较高,垂直于航迹方向上回波强度衰减较快,图像强度差异明显,沉船目标显著,但目标阴影被覆盖;图12b为应用式(2)量化后生成的瀑布图,远端的回波强度得到增强,横向灰度变化均衡,图像细节信息得以显现,沉船阴影显示明显。
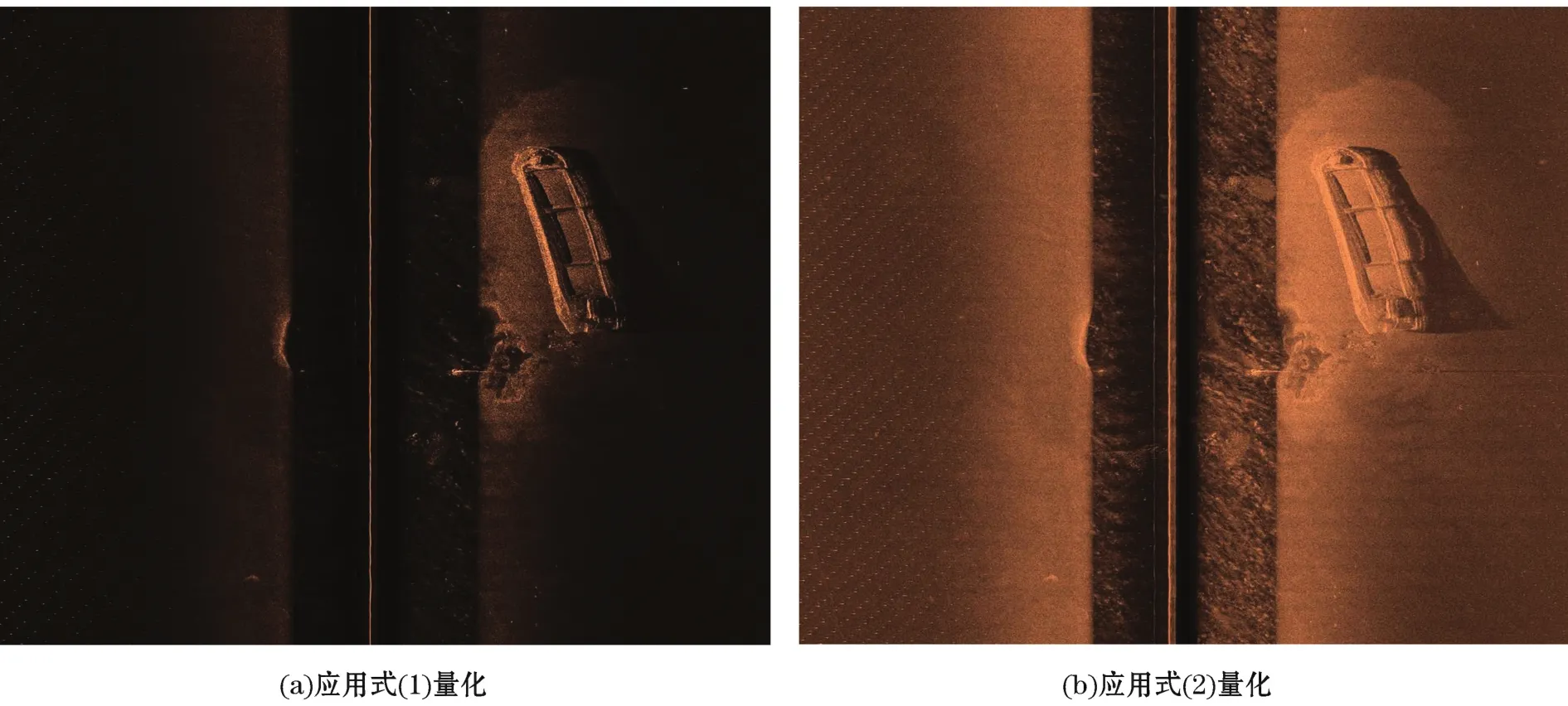
图12 量化后瀑布图Fig.12 The waterfall i mage after quantification
通过使用渤海海域沉船搜寻实测数据,验证了侧扫声呐原始数据解码方法的正确性以及图像可视化的可行性。解码侧扫声呐XTF格式文件后,获得原始Ping数据信息,应用上述两种模型对原始回波数据进行量化,生成直观形象的瀑布图。两种量化模型各有特点,在应用时,应根据实际需求进行量化模型的选择。
6 结 语
侧扫声呐是当前应用于海洋探测活动的主要设备之一,XTF格式是使用范围广泛的侧扫声呐数据记录格式。针对侧扫声呐原始数据解析与图像可视化显示问题,以渤海海域沉船搜寻实测数据为例,编程实现了原始数据的准确解析,提取测线主要信息和Ping数据各重要参数,提取结果准确可靠。采用2种回波强度与灰度转换模型,分别生成沉船瀑布图,实现了侧扫声呐图像可视化。结果表明:模型选择不同,瀑布图显示效果不同,因此在实际应用时,应根据实际数据采集效果选择合适的转换模型。
目前仅实现了单测线数据解析与图像显示,但实际工作时,往往扫测区域广、测线数目多,后续工作应着重实现测线文件的批量化处理与解析。此外,受侧扫声呐测量原理和成图机理影响,瀑布图往往存在不同程度的几何畸变和灰度畸变,不能表示目标物的准确位置,在实现数据解析与图像显示的基础上,后续应针对图像畸变等问题,进行畸变改正、航迹处理和地理编码等研究,以获取目标物准确地理位置信息和其自身精准几何形状及尺寸等必要信息。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
中国石油石化(2022年12期)2022-07-16
物联网技术(2020年12期)2021-01-27
海洋信息技术与应用(2020年3期)2020-08-24
中国外汇(2019年19期)2019-11-26
小学科学(学生版)(2019年10期)2019-11-16
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
汽车零部件(2017年4期)2017-07-12
