
径向梯度模糊的图像小景深模拟算法
2020-07-20 10:12:08徐颂民朱映辉江玉珍
韩山师范学院学报 2020年3期
徐颂民,朱映辉,江玉珍
(1.华南理工大学 继续教育学院,广东 广州 510000;2.韩山师范学院 计算机与信息工程学院,广东 潮州 521041)
在摄影成像系统中,光线在景物聚焦面的前后开始由聚焦状态变换至扩散状态,对应的影像也逐渐模糊,景深(depth-of-field,DOF)因此也成为摄影技术的一个很重要的概念.当某一景物聚焦清晰时,该景物前方清晰物体到后方清晰物体之间的距离就称景深.大景深相片聚焦的区域较大,且其前景和背景也都比较清晰;小景深相片聚焦的区域小且只有聚焦景物较为清晰.自1981年Potmesil的景深效果绘制研究论文[1]发表以来,图像景深的处理开始出现并广泛应用于影视娱乐、信息可视化、眼科治疗与校正、生物形态研究等领域[2-4].本文主要研究在现有的目标区自定义的图像小景深算法基础上[5],提出一种改进的、基于非聚焦区径向梯度模糊的小景深生成算法.
1 小景深与梯度模糊
小景深效果是摄影技术常用的表现手法:聚焦对象清晰鲜明,而其前后景均相对模糊,清晰与模糊的影像间形成强烈视觉对比,能增强图像的深度暗示,使画面更具纵深距离感[6].此外,小景深效果特别适用于景物特写,其图像艺术感强,有助于观察者快速抓住图像主题内容,更好地理解主题思想.然而,普通数码相机尤其是自动对焦相机由于物理的原因焦距和光圈均受到限制,拍摄出来的相片多为大景深,相片中往往存在较大面积的清晰区域,不能很好地突出重要目标.对此,目前许多数码成像设备或图像处理系统都尝试通过软件的方法对大景深图像进行小景深效果的模拟.如HTC智能相机one_XC中内置了小景深转换程序,但该程序的小景深效果是统一生成一个圆形的聚焦区,区内图像清晰,区外则模糊,生成图中景物的聚焦效果很不自然.PhotoShop 在新版本CS6 之后也增设了Field Blur(场景模糊)、Iris Blur(光圈模糊)和Tilf-Shift(倾斜偏移)三种全新的模糊滤镜来帮助摄影师在后期处理照片时添加景深效果.新功能大大简化了PS对图像小景深特效的处理过程,但应用上仍存在一些不足:(1)操作选择性大,需具备一定的专业经验,如设置控制点位置、模糊参数、模糊形状或倾斜偏移方向等;(2)难以获取聚焦景物的清晰轮廓以增强与非聚焦景物的视觉对比.
文献[7]在三维仿真场景的景深处理上提出了较好的指导方法:在景深范围之内的物体都是清晰的,在景深范围之外,物体要有梯度的模糊.图像是二维空间,相对而言,在图像平面上离聚焦中心距离越远的景物,其在纵深方向与聚焦景物存在距离差的可能性越大.对此,本算法引入“径向梯度模糊”概念,即对图像非聚焦区采用非均匀模糊化:以聚焦中心为参照点,像素离参照点越远模糊程度越大.其中,算法的关键步骤是运用边缘检测及数学形态学“闭运算”等方法实现聚焦区与非聚焦区的分离,获取精确的非聚焦区.
2 自定焦小景深模拟算法
2.1 算法概述
算法思想是:在大景深图像中以两点指定一矩形聚焦目标区(指定景物对象左上及右下角坐标位置),在该区中通过边缘检测、区域填充及数学形态“闭运算”等方法实现聚焦对象区与非聚焦区的精确分割,再在非聚焦区上运用“径向梯度模糊”方法虚化景物以获取小景深模拟效果.算法流程如图1所示.
2.2 聚焦区与非聚焦区的分割处理
对图像做聚焦区与非聚焦区的分割是景深生成处理的前提,这个过程包括4个步骤:(1)图像HSI颜色空间转换,目的是提高下一步边缘检测准确度;(2)基于色调H和亮度S 通道的Sobel 边缘检测,目的是获得较连贯的聚焦区边缘,以图2图像为例,图3(a)为目标区边缘检测效果;(3)运用行列扫描填充方法进行聚焦-非聚焦区初始分割,目的是获得聚焦对象的初始分割图,图3(b)为聚焦对象的初始分割效果;(4)聚焦对象的二值“闭运算”区域修正,目的是获取精确的聚焦-非聚焦区的分割效果,图3(c)中白色区域就是修正后的聚焦景物区.本文算法中上述分割预处理上采用的方法与文献[5]一致,各步骤具体的运用原由、数学模型及执行方法可参考文献[5],这里不再复述.
2.3 非聚焦区的“径向梯度模糊”虚化
在获取聚焦对象分割图的基础上,依据目标区在原图中的位置可获取全图的非聚焦区,如图4白色区域.以目标区中心位置(Xcenter,Ycenter)为径向中心,在非聚焦区进行梯度均值滤波.具体方法如下
(1)依据原图宽高Iwidth和Iheight,如式(Ⅰ)计算最大的均值模糊窗口尺寸.
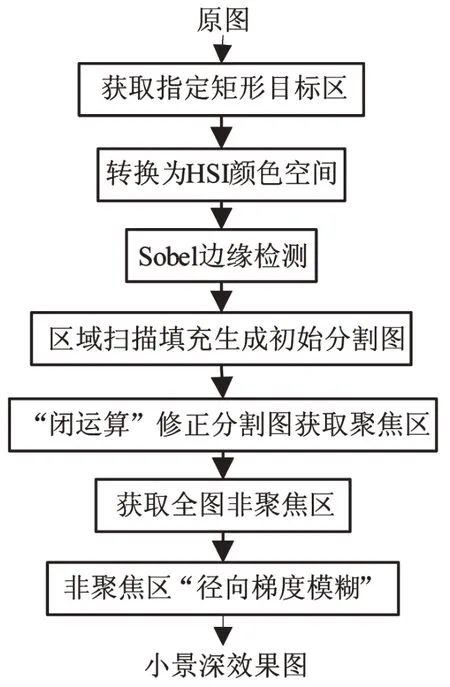
图1 小景深模拟算法流程图

图2 图例1及指定目标区
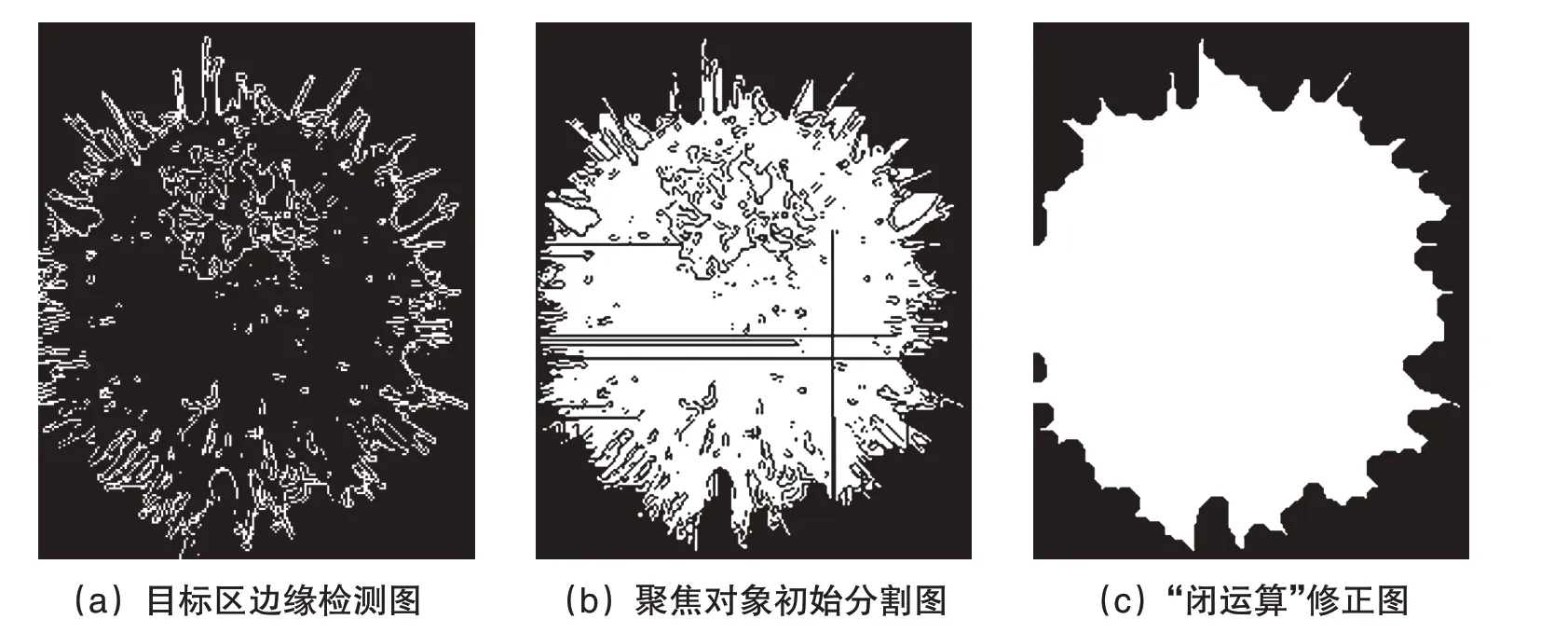
图3 聚焦对象分割图的生成及修正

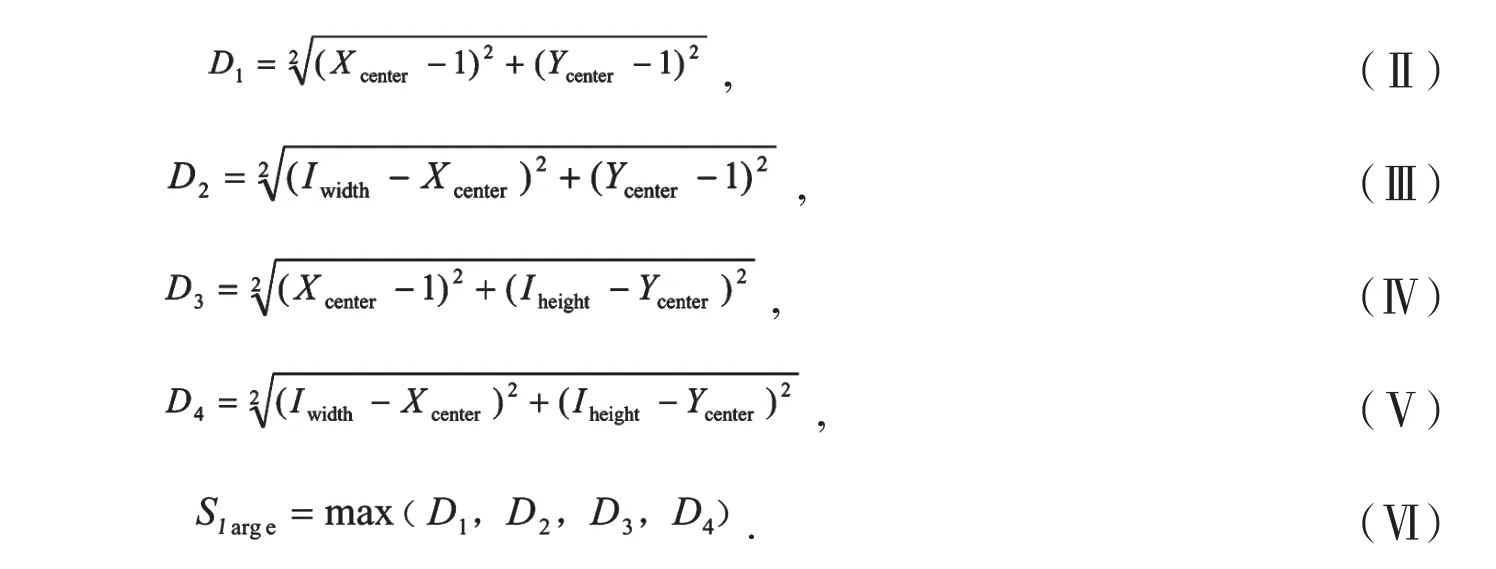
(2)计算原图四边角离径向中心(Xcenter,Ycenter)的最大距离Slarge,公式如(Ⅱ)-(Ⅵ)
(3)在非聚焦区中,依据当前点(x,y)与聚焦中心的距离Slocal计算当前点均值模糊窗口尺寸Wlocal.公式如(Ⅶ)、(Ⅷ).

梯度模糊方法依据原图像大小,将最大模糊窗口控制在一定范围内.局部模糊程度与径向中心距离线性相关,该非聚焦区处理方法对大多数景物图均能获得良好的虚化效果.
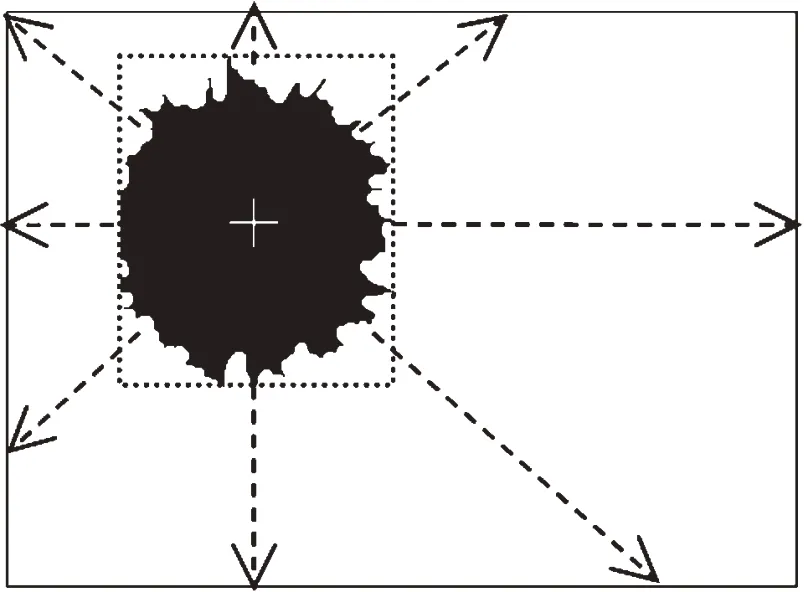
图4 非聚焦区“径向梯度模糊”示意

图5 图2的小景深效果
3 实验与分析
运用本文算法,图2 的小景深模拟效果如图5 所示.相对原图,效果图保留了花朵的清晰效果,其余景区模糊虚化,离花朵距离最远的叶片模糊程度最大,这种视觉上鲜明的对比更突出了画面主题的表达.
算法基于自定聚焦对象,使小景深模拟处理的灵活性更高,使用者可任意设置聚焦位置及范围以产生不同的小景深效果.以图6(a)为图例2,如设置①区为目标区,算法产生的小景深效果如图6(b),聚焦对象为左前鸳鸯;若设置②区为目标区,则小景深效果如图6(c),聚焦对象为右后鸳鸯.算法对人物图像一样适用,以图7(a)为图例3,图7(a)主要包含四个女孩的脸图.实验设①区为目标区,聚焦对象为右侧女孩脸图,其小景深效果如图7(b)所示.若设②区为目标区,聚焦对象为中间两个女孩脸图,则小景深效果如图7(c).由上述两例可见,本文算法聚焦范围及位置可随意设定,且聚焦对象目标明确,轮廓清晰,非聚焦区的径向梯度模糊使前景与背景间在自然的距离过度中形成鲜明对比.在特写对象的表现力上,算法生成图突出了局部小面积的景物细节,具有比原图更强烈的视觉感染力.

图6 图例2及其两种小景深模拟效果
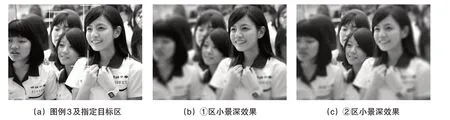
图7 图例3及其两种小景深模拟效果
4 结 语
本文研究在大景深图像中通过自定义聚焦区快速获取小景深效果的方法,在已有算法基础上提出一种基于非聚焦区径向梯度模糊的小景深模拟算法,该算法的特点是:(1)在边缘检测的基础上运用数学形态学闭运算有效地修正了聚焦区的分割并最终实现非聚焦区的精确提取;(2)用基于非聚焦区的径向梯度模糊方法获取优质小景深模拟,能增强图像的深度暗示,突出图像的主题思想.此外,算法操作方法简便,图像适应范围广,可行性高,可作为手机、数码相机的内嵌程序以执行成像效果的后续处理.
猜你喜欢
——以三江口港产城新区为例
华南地震(2022年1期)2022-04-06 05:54:22
成都信息工程大学学报(2021年4期)2021-11-22 07:44:48
——以河南省为例
办公室业务(2019年14期)2019-08-01 02:33:28
孩子(2019年5期)2019-05-20 02:52:44
数位时尚(幼儿教育)(2017年12期)2018-01-05 01:23:30
中国卫生统计(2016年1期)2016-12-27 08:49:07
测绘科学与工程(2014年6期)2014-02-27 07:06:23
电讯技术(2010年8期)2010-08-08 09:58:26
数码摄影(2009年8期)2009-10-14 06:37:54
电影评介(2009年9期)2009-05-13 08:09:52
