
新型四臂扶持式康复机器人设计
2020-07-16 01:53:22毛志贤韦建军王春宝孙正迪刘铨权段丽红王玉龙龙建军
广西科技大学学报 2020年3期
毛志贤,韦建军*,王春宝,,4,孙正迪,王 同,刘铨权 ,段丽红,王玉龙,龙建军
(1.广西科技大学机械与交通工程学院,广西柳州545006;2.深圳市老年医学研究所,广东深圳518035;3.深圳大学第一附属医院,广东深圳518035;4.华南理工大学,广东广州510641)
0 引言
脑卒中是一种由脑血循环障碍引起的急性脑血管疾病.2010年“世界卒中日”的主题是“六分之一”,即全世界每6个人中就有1个人可能罹患脑卒中,每6秒钟就有1人死于卒中,每6分钟就有1人因卒中而致残[1].为了缓解偏瘫患者数量增多而治疗师缺口严重的形势,可辅助患者进行下肢康复训练恢复步态行走的康复机器人相继问世,偏瘫患者的生活质量可在康复机器人的辅助下有所提高.目前较为普遍用于恢复步态行走的外骨骼机器人治疗方式与治疗师手法存在较大差异,使患者康复效果达不到最佳,如Lokomat机器人[2]通过电机带动各关节运动实现对下肢各关节的运动训练,但是该机器人体积大,患者穿戴复杂,无法全面反馈患者的运动信息;美国Delaware大学的下肢外骨骼步态矫形器[3]采用被动式外骨骼,机器人无法实现步态的辅助调整;清华大学研发的步行康复训练机器人GRTS[4]采用外骨骼形式,穿戴复杂,限制了患者主观能动性发挥;哈尔滨工程大学开发的减重式步态康复训练机器人[5]存在功能单一或适应性差的问题,缺乏康复训练评价系统.针对外骨骼康复机器人穿戴不便、与治疗师效果存在较大差异的缺点,参照仿生机器鱼[6]可高效进行海资源勘查的优势,从仿生角度出发,仿治疗师手法创新设计四臂扶持式康复机器人,减小与治疗师手法的差异,实现康复训练效果的最佳化.
基于治疗师康复手法分析,为减小治疗师在康复训练中手臂的摆长,使患者在步态训练时保持姿态的稳定,设计具有四臂的扶持式康复机器人(如图1所示).该康复机器人由上双臂和下双臂组成,可模拟多名治疗师对患者进行步态康复训练.上双臂扶持严重肌无力患者的肩部,以恢复患者的正常体姿;下双臂扶持患者的髋部,辅助步态训练.通过4只机械臂的协调运动来模拟治疗师操作并快速适应患者肩部和髋部的生理差异.
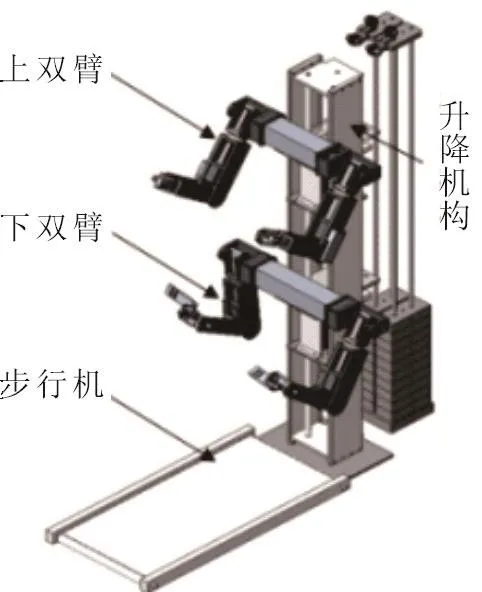
图1 新型四臂扶持式康复机器人Fig.1 New four-arm assisted rehabilitation robot
1 四臂康复机器人结构的创新设计
1.1 治疗师康复操作建模
本文设计的康复机器人可实现治疗师最大有效康复手法的量化,从而使患者在每一次训练时接受到最有效的治疗手法.在分析治疗师手法的同时,分析治疗师手臂的生理结构和患者的病理特征,建立治疗师手臂模型,如图2所示.
患者的步态训练主要由治疗师双臂来完成.常规训练中,患者的髋部在治疗师双手的扶持下,患者肌力不足的影响可以通过治疗师手臂的力量和手臂的自由度来缓解,同时患者运动自由度缺失所造成的影响也可通过治疗师手臂自由度得到缓解.另外对于早期偏瘫患者,在进行步行训练时,需要一名治疗师扶持患者的肩部,以恢复患者的正常体姿,同时需要另一名治疗师扶持患者的髋部,辅助步态训练.治疗师的双手能够主导患者肩部和髋部运动的轨迹,通过腕部的灵活度来适应患者在训练过程中自身姿态的差异,以满足患者步行训练时肩部和髋部的协调运动.另外,治疗师通过腿部的屈伸动作来弥补患者的身高差异,基于以上手法分析建立了人体坐标系,如图3所示.
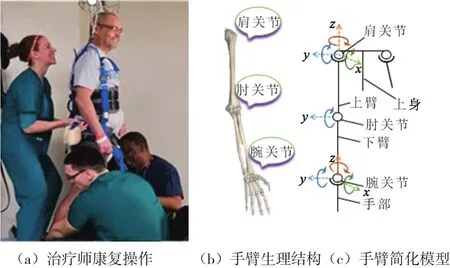
图2 治疗师手臂简化模型Fig.2 Therapist arm simplified model

图3 治疗师康复操作手法建模Fig.3 Modeling therapist's rehabilitation operation
1.2 人体髋部运动空间分析
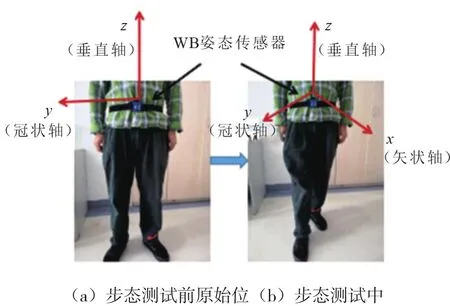
图4 髋部运动测试Fig.4 Hip exercise test
为测量人体步态训练髋部运动空间,利用实验室已开发的WB姿态传感器[7]测人体髋部运动角度,以1位25岁的健康者作为测试对象,测试场景如图4所示,测试对象站立在y轴(冠状轴)方向,面向x轴(矢状轴)正向轴.测试过程中朝x轴正向轴步行,当右腿向前迈出第一步时,右髋在xoy平面(水平面)的前进角度记为j,yoz平面(冠状面)的上升角度记为k.经过多次步态测试并取各角度平均值计算结果如下:人体髋部前进角度j的范围为[-5°,5°],上升角度k的范围为[-3°,3°].测量人体左右髋之间的距离为330 cm,并将其简化为连杆L.结合人体髋部运动角度和杆长L在matlab中绘制髋部的运动空间散点图如图5所示.由图5(b)、图5(c)可见,左髋和右髋运动空间都为半球面,分别从左髋右髋运动空间中截取平面圆如图5(a)所示,表示人体左右髋部运动空间为球面,可直观表示人体髋部运动空间范围.

图5 人体步态髋部运动空间Fig.5 Human gait hip movement space
1.3 四臂康复机器人建模
人体手臂有7个自由度,分别为肩部3个,肘部1个,腕部3个.本文根据治疗师操作手法特点,合理分配简化机械臂的自由度以辅助患者进行步态训练.在传统康复训练过程中,治疗师双手夹紧患者的髋部进行步态纠正训练,无外展内收动作,故机械臂肩部由3个自由度简化为2个自由度,即前屈后伸和内旋外旋2个自由度,机械臂大臂的回转动作简化到肩关节的内旋外旋动作.因机械臂腕部扶持患者髋部,变动距离小,腕部采用无动力设计,根据这一特点,本文设计的新型四臂扶持式康复机器人手臂有6个自由度,机械臂模型如图6所示.3个主动自由度和腕关节3个从动自由度的结合是本机器人的特点,通过机械臂肩部位置的2个自由度和肘部位置的1个自由度使机械臂末端能够达到上下、左右、前后移动的目的.这3个自由度是本康复机器人的主动自由度,当患者相对于机械臂姿态变化所造成的自由度影响可以通过机械臂腕部的3个从动自由度得到抵消,通过机器人下双臂各关节的配合来实现患者的步态康复训练.腕部的灵活设计不仅控制了髋部运动的精确度,而且简化了机构,优化了控制性能.基于以上治疗师康复手法分析,建立四臂机器人模型如图7所示.对比传统康复训练,两名治疗师双手集成机器人的上下双臂,治疗师腿部屈伸动作集成机器人的升降机构.
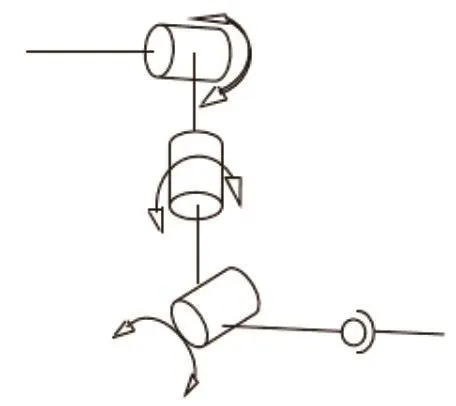
图6 机械臂模型图Fig.6 Arm of robot model
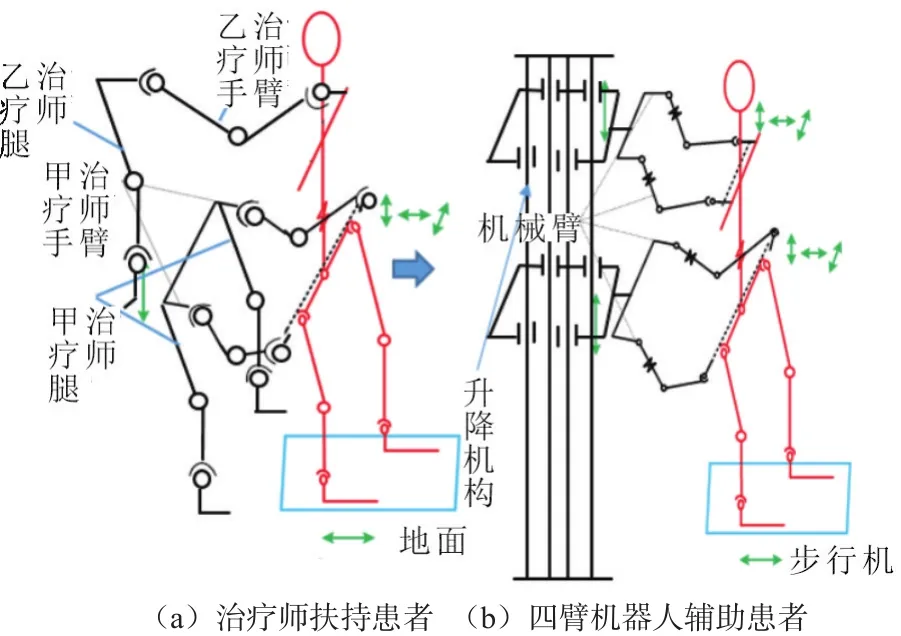
图7 四臂机器人模型Fig.7 Four-armed robot model
1.4 四臂康复机器人机构设计
设计的四臂康复机器人升降机构的运动空间相对于机械臂的运动空间很小,且主要通过丝杠来传递运动,机构较为简单,故不再详细介绍.机械臂是机器人当中最重要的结构,肩关节、回转关节和肘关节、腕关节的结构设计如图8所示.手臂在运动过程中,肩关节受的转矩最大,肩部传动部分不仅包括了齿轮组1和内齿轮组,同时包括了谐波减速器.回转关节由电机及谐波减速器构成,肘关节是四臂机器人辅助患者进行康复训练时最直接的控制部位,通过肘关节内外侧板与上臂回转关节连接,该关节的传动是由一对锥齿轮、传送带和减速器三者来实现.机械臂腕部机构是四臂机器人辅助患者进行康复训练时的抓取固定关节,通过前臂内外侧板与肘关节连接;从动自由度设计是腕部机构的设计特点,在机械臂肩关节和肘关节的组合控制下,腕关节实现组合控制运动,以此防止机构被卡死,减少患者的二次伤害.因此,腕关节的设计不仅体现了高灵活性的特点,而且也体现了多自由度的特点,同时也体现了新型四臂扶持式康复机器人主动自由度加从动自由度的特点.在已完成的设计模型基础上,四臂机器人样机如图9所示.

图8 机械臂结构设计Fig.8 Mechanical arm structure design
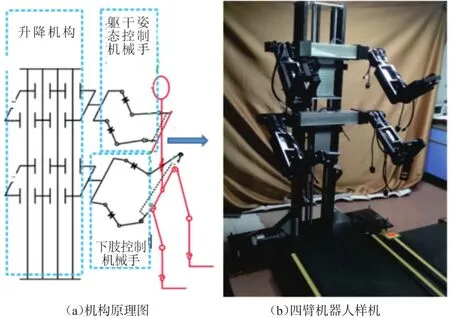
图9 新型四臂扶持式机器人Fig.9 New four-arm supporting robot
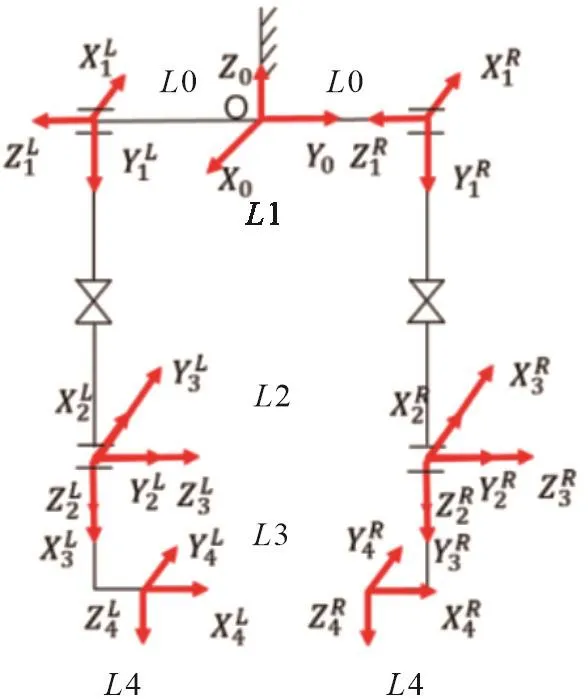
图10 机器人坐标系Fig.10 Robot coordinate system
2 双臂运动空间分析
下肢康复机器人通过控制患者髋部两点位置来调整其在步态训练中的运动轨迹.为了验证机构设计的合理性,需要对机器人的工作空间进行计算,保证患者步态康复训练的顺利进行.结合本文设计的四臂机器人特征,机械臂腕关节处的位置即为患者髋部扶持点的位置.考虑到所研究机械臂为典型的串联机构,采用Denavit-Hartenberg(D-H)方法建立运动学模型,通过计算运动学[8]正解进一步分析机械臂的工作空间.首先将机械臂简化为连杆并建立D-H坐标系如图10所示,基于已建立的坐标系列出D-H参数如表1所示.以肩关节为基坐标系,结合式(1)、式(2)计算腕关节相对肩关节的坐标变换矩阵.结合机械臂各关节的具体长度并代入式(1)、式(2)计算出运动学正解如式(3)所示.
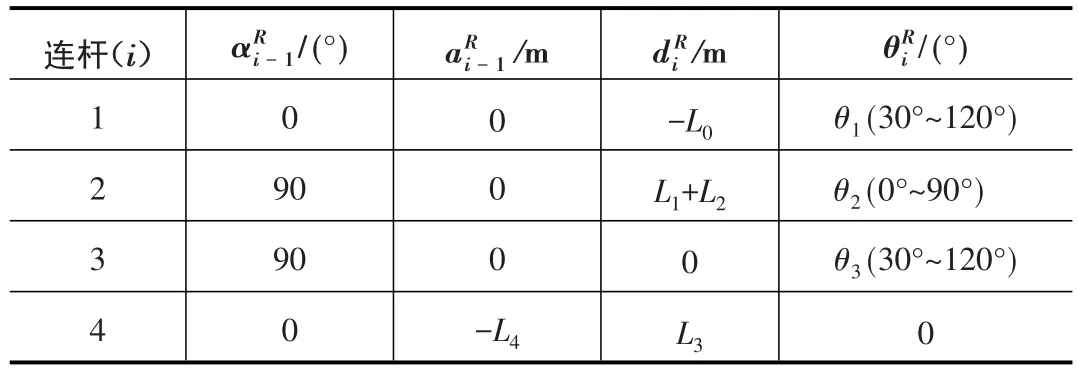
表1 D-H参数Tab.1 D-H parameters


式(2)中:nx,ny,nz,ox,oy,oz,ax,ay,az——机械臂末端姿态坐标,px,py,pz——机械臂末端位置坐标.
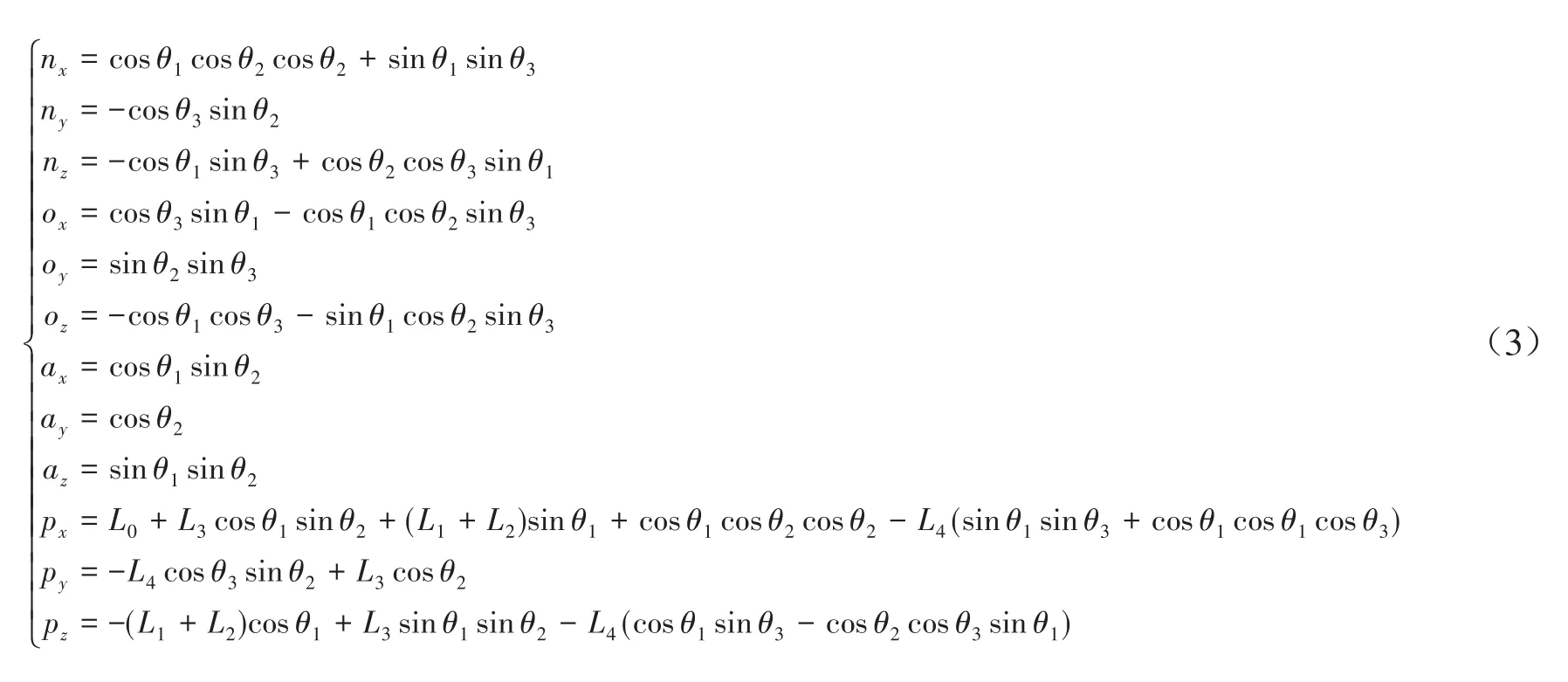
式(3)中:L0,L1,L2,L3,L4——各连杆长度.
基于已计算得到的运动学正解,使用蒙特卡洛法并借助MATLAB软件绘制机器人单臂及双臂的计算空间如图11所示.
在分析机器人机械臂的运动空间后,进一步对机器人的逆运动学分析并计算出机械臂各关节变量的值,作为后续位置控制算法的基础,结果如式(4)—式(6).
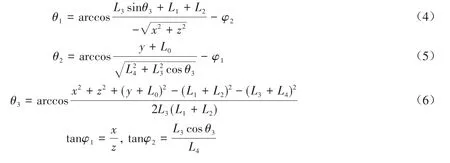
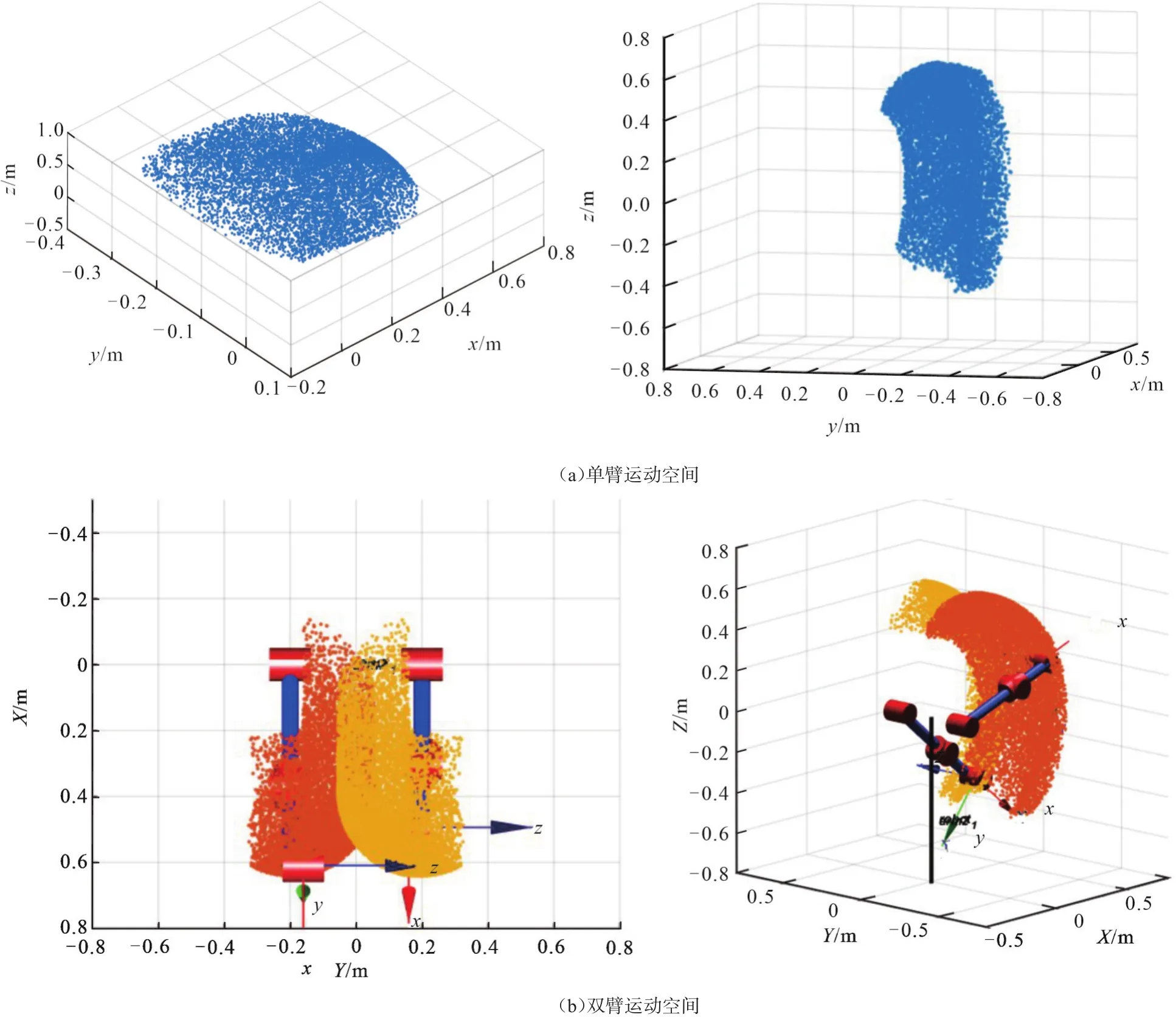
图11 机械臂运动空间Fig.11 Arm of robot working space
通过对比机械臂运动空间与人体髋部运动空间可知:所设计的康复机器人双臂的运动空间远远大于人体髋部运动空间.人体运动空间范围以mm为单位,能到达左极限、右极限、上极限、下极限的范围约为7 mm;设计的机械臂运动空间的极限位置以m为单位,极限位置都大于100 mm,满足人体髋部步态运动空间,验证了机构设计的合理性.
3 结论
1)以治疗师为研究对象,首先分析了治疗师手臂生理结构并建立生理模型,以健康者为测量对象,使用WB姿态传感器测量人体髋部运动范围.
2)基于治疗师康复训练手法,结合仿生学理论仿治疗师建立康复机器人机构模型.
3)机器人采用对称结构设计,四肢机械臂均包含3个主动自由度及3个被动自由度,可以辅助患者开展单项训练及包含患者躯干在内的整体性协调训练.建立机器人双臂的运动学模型,计算运动学正解及逆解,并绘制机械臂的工作空间散点图.测量结果表明:本文所提出的机器人满足人体髋部运动空间需求,验证了机构设计的合理性,为治疗师手法再现模拟提供了基础.
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
中老年保健(2021年10期)2021-08-24 06:42:46
中老年保健(2021年8期)2021-08-24 06:23:40
中老年保健(2021年9期)2021-08-24 03:51:10
上海护理(2019年12期)2019-02-11 07:21:11
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
上海护理(2017年4期)2017-04-02 18:33:42
上海护理(2015年1期)2015-04-03 13:49:20
发明与创新(2015年33期)2015-02-27 10:40:00
